(54) ФОТГОЭЛЕКТРИЧЕСЖИЙ ПРЕОБРАЗСЖАТЕЛЬ УГЛА ПОЕЮРОТА ВАЛА В ЧИСЛО
I
Изобретение относится к автоматике и вычислительной технике и может быть в:;польз(Аано в цифровых след5&аих светемах управленна объектами, содержаших UBM .J
Известны цифровые преобразователи угла (ЦПУ), оснсюанные на использовании механической развертки квантуюшей шкалы. Их особенностями являются валячие опорного и сигнального чувствитепь-. Q ных элементе, которые во взаимодейст ВИИ с квантующим элементам, связанным с приводом, осуществляют преобразование квантсюанной в электрическую величину l.tS
Недостатком известных ЦПУ явлаеФся низкая точность преобразования угла в код, обуслсюпенная трудностями изготовления квантующей шкалы с малой дискретностью.. 20
Наибопее близким по технической сущности к предлагаемому является фотог электрический преобразсюатель угла пюорота вала в число, содержащий корпус, привод измерительный, индексные неаед вижныйн подвижный диски с радиальными растрами и реперными штрихами, на измерительнсвл диске расположены п р епер ных штрихов, нанес01ных через равныеинтервалы по длине его окружности и две маски, на индексных, дисках расположены по одному реперному и щ гевые диефрагмы, размещенные по однЫ1 линии с штрихами, фазсюые растровые датчики угла, фазсшый и реперный выходы которых соединены с входами блоке формирования блоков формирования импуль сов Старт и Стоп, а кодовые выходы с входами дешифраторов, блок квантования фазы, блок задержки импульсов, IfVt триггеров и элементов И, дешифраторы , блок сбора импульсов, счетчик нмпульссю и блок «цифровой индикации 2
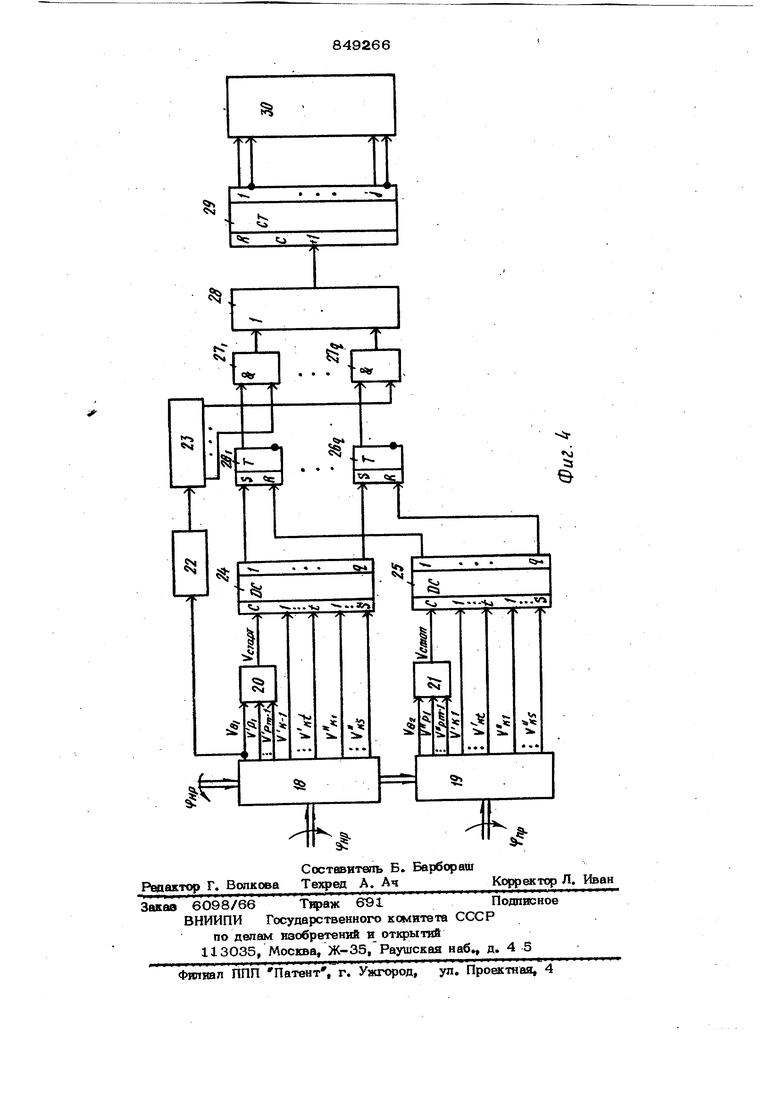
Недостатком известнся о фотоэлектрического прео азователя является относительно н идсокая точность, обусловленная случайней и систематической погрешностями от неточности формирования импупь ссе Старт и Стоп и неточности изготовления радиального растра. Цель изобретения - повышение тЪчнос- ти фотоэлектрического преобразователя уг ла псжорота вала в число. Поставленная цель достигается тем, что в фотоэлектрический преобразсеатель угла поворота вала в . число, содерж щий корпус, в KOTopCBvt жестко закреплен неподвижный индексный диск с радиаль ным растром, привод, на валу которого расположен измерительный диск с радиал ным растре и Wl реперными штрихами, нанесенными через равные интервалы по длине его окружности и две кодовые маски, подвижный индексный диск с радиальным : растром, установленный на измеряемом валу, .на индексных дисках расположены по одному репфному штриху и щ левые дий})рагмы, размещенные по одной линии с реперными штрихами, первый фазовый растровый датчик угла, включак щий осветитеггьную и фотоприемную сист&лы, измерительный и неподвижный инде сный диски, а второй фазовый растровый датчик угла - осветительную и фотоприи ную систолы, измерительный и подвижный индексные диски, фазовый и реперный выходы первого и второго фазовьхх растр вых датчиков угла соединены с входами блоков формирования импульсе Старт и Стоп, соответственно, выходы ко торых соединены с управляющими входам первого и второго деш14ратс ов соответственно, кодовые выходы первого и второго фазовых растровых датчиков угла соединены с соответствующими информационными входами первого и второго д&шй|)ратфов, выходы которых соединены с соответствующими входами, hi тригге ров, прямые выходы которых соединены с первыми входами элементсиэ И соответ стьенно, выходы KOTOfbix подключены к соответствующим входам блока сбора импульсе, выход которого соединен со вхо аам счетчика импульсов, выходы которого подключены к соответствующим входам блока с ци{)рсжой индикации, фазовый выход первого фазового растрового угла через блок кванте®ания фазы соединен со входсм блока задержки счерных импульсов, соответствующие выходы которого соединены со вторыми входами элементов И, на измерительном дне ке размещены Jji щелевые диафрагмы по одной линии с реперными штрихами, а код(жые маски, KOTOf ie содержат hi 1 дискретных участке и -Ь дорожек расположены между реперными штрихами и щелевыми диафрагмами, на индексных дисках нанесены кодсжые маски и 1 ре перных штрихов и радиальных растре через равные интфвалы по длине окружности, по одной линии с реперными штрихами размещены Уп 1 щелевых диафрагм, а кодсдаые маски содержат hi дискретных участков и S дорожек, и дополнительно введены (1 - 2) hi триггеров и элементы И, первый и второй фазовые раст рсеые датчики угла дополнительно содержат по Ж- 1 репфных выходов, которые соединены с дополнительными входами блоков формирования импульссе Старт и Стоп соответственно и по -t кодовых выход (Ж, которые соединены с дополнительными информационными входами первого и втфого деши})раторов соответственно , дополнительные выходы которых coeiдинены с соответствующими входами {И1 - 2) W триггере, прямые выходы которых соединены с первыми входами до нолнительных элементов И, блок задержки; счетных импульсов дополнительно содержит (щ - 2) W выходов, которые соединены со вторыми входами дополнительных элементов И . На фиг. 1 схематично изображена кон-; струкдия преобразователя, общий вид; на фиг. 2 и 3 - часть измерительного диска и часть подвижного и неподвижного индексных диске ; на фиг, 4 - структурная схема преоф азователя. Фотоэлектрический преобразователь угла поворота вала в число содержит корпус 1, привод 2, вал 3 привода, измерительный диск 4, неподвижный индексньтй диск 5, подвижный индексный диск 6, вал 7, угловое положение которого пре образуется в код, осветительную систему 8, фотоприемную сист-ему 9, измерительный растр 1О, индексный растр 11, реперные штрихи 12, щелевые диафрагмы 13, кодовые маски 14 измерительного диска, реперные штрихи 15, щелевые диафрагмы 16, кодовые маски 17 индеконых дисков, фазовые растровые датчики 18 и 19, блоки 2О и 21 формирования импульсов Старт и Стоп, блок 22 квантования фазы, блок 23 задержки счет ных импульсе, дйнифраторы 24 и 25 триггера 26 ..., 26 q, , элементъ И 27j 2ici блок 28 сбора импульсов, счетчик импульсе 29, блок ЗО цифровой индикации. 56 На фиг. 1-4 введены следующие обозначения : ( углевой шаг штрихе® рещиапьного растра Ю, Тир, соответственно ив|)роеые положения измерительного, неподвижного и подвижного индексных растрсвых дисков 4,5 и 6, VQ.V- соответственно фазовые выходы дачик1ов 18 и 19, Mp.,.«VI-1,Vn соответственно репарныё шл ходы фазовых растровых датчиков 18 и 19, тагг тогГ соответственно импу;1ьсы Старт и Стоп% ti J.: )« - соответственно кодовые выхо VK -i 4/VKf...,„/н ды фазового растрового датчика 18119/, поедставляюшие собой коды номеров совпавших репфных штрихе 12 и 15 . Для устранения погрешности от экоиентрисисета диске 4,5 и 6 фазовые каналы датчике 18 и 19 выполнены с двухсторонним считъюанием (фиг. 1). Угловое расстояние между штрихами 12 и щелевыми диафрагмами ,13 диска 4 равно 2ff/m , а между реперными штрихами 15 и диафрагмами 16 дих кеж 5 и 6 равно Zltly -i , Осветительная 8 и фотопри«лная 9 сисгемы.диски 4 и 5 в с(жокупности представляют собой дат чик 18, а осветительная 8 и фотоприемная 9 системы, диски 4 и 6 - датчик 19, которые содержат фазовый, реперный и кодовые выходы для съема информации (фиг. 1, 2 и 3). Фотоэлектрический преобразователь уг ла поворота вала в число работает следу ющям образом. При постоянно вращении приводом 2 диска 4 с выходе датчиков 18 и 19 снимаются напряжения UQ, фазы которых Оч гтг/о/ ир - Чнр) . Q,i 2It/«j( Мир-.пр линейно зависят в пределах одного шага if от разностей уг левых положений измерительных 4 и индексных 5 и 6 дисков.Эти Напряжения поступают на блоки 2О и 21 сигналов фо мирования Старт и Стоп и блок 22 квантевания фазы. Последний форми руёт один счетный и fпyльc на каждое при ращение фазы, равное 2lt|ii« что соответст вует шагу кванте ания угла на величину ну tJtj|H . В момент, когда реперный штрих 12 иак ерительного диска 4 проходит мимо ре перного штриха 15 неподвижного кндексне го диска 5, на реперном выходе датчика 18 вырабатьшается напряжение Un, 66 которое поступает на блок 20 формирования сигнала Старт . Для более точной фиксации углежого положения Старт , напряжение ир стробируется импульсом, вырабатываемым в момент Q О. В резутгьтате формируется Uf-T-Qp поступающий на управляющий вход деши})ратора 24, на информационные входы которого подаются напряженияUKy...fc UK-,..S дирующие в двоичном коде номера совпав шик реперных штрихов 12 и 15 viSMepnтелького диска 2, и неподвижного индекезного диска 5 . С соответствующего этому номеру выхода дешифратора 24, например первого, снимается импульс, запускающий триггер 26 в стартс ое (единичное) состояние. При этом открывается эл1Емевт И 27f и счетные импульсы с первого выхода блеска 23 задержки импульсов поступают через злалент И 27( и блок 28 сбора импульсе на вход счетчика 29 импульсов. После этого происходит Ш (м- 1)-1 совмещений реперных штрихе 12 и 15, осуществляющих поочередные запуски в стар-говое состояние соответственно три1 геров 26л. п, . Каждый раз со стартом очереднсяго триггера 26 счетчик 29 импульсе, продолжи подсчет импульсш, вызванных стартами предыдущих триггере 26, начинает дополнительно подсчет счетных импульсов, снимаемых со следук щего по nopsaify выхода блока 23 ЗЕН держки импульсов. В момент, келгда первый, реперный штрих 12 измерительного диска 4 проходит мимо первого реперного штриха 15 подвижного индексного диска 6, вырабатывается напряжение Ур. и аналогичным о&разом, как было описано выше, блок 21 формирования сигналаСтарт формирует который, пройдя через дешифратор 23 устанавливает триггер 26 в состояние Стоп , элемент И закрывается. После ЭТОГО происходит И1 (И1- 1)1 совмещений реперных штрихов 12 и 15, осуществляющих последежательно возврат ( М- 1 всех m I Ш- 1 триггеров 4, состеигние Стоп и закрьшанию hi ( W - 1) - 1 элементов И 272 .- Ч . В момент, когда закроется последний з открытых элементеж И 2Та, подчет счетных импульсе прекращается счетчик 29 зафиксирует код, равный 784 сумме кодов N. , каждый ю которых является ци})ровым эквивалентом углового положения подвижного индексного дио ка 6 относительно неподвижного индексного диска 5, т.е. Ц Цпр - , Средний арвфметический код N гЗ является конечным результатом преобразо вания утла поворота вала в число. Таким образом, за два оборота измери тельного диска 4, т.е. за один цикл механической развертки квантующей .шкапы , производится с старт-стопных преобразований угла в &од. Причем каждое из пр& образсюаний осуществляется использованием для формирсвания импульсов Старти Стоп и счетных импульсов разных участ ков растравойдорожки (квантующей шкалы), имеющей погрешности, разные по величине и знаку на разных ее участках, что позволяет повысить точность предлатгаемого преобразователя по сравнению с известным. Формула изобретения Фотоэлектрический преобразователь угпа псжорота вала в число, содержащий кор цус, в котором жестко закреплен непод вижный индексный диск с радиальным растром, привод, на валу которого расположен измерительный диск с радиальным растром и Ы реперными штрихами, нанесенными через равные интервалы по дтшне его окружности и две кодовые маски, неподвижный индексный диск с радиальным растром, установленный на измеряемом валу, на индексных дисках расположены по однсалу репернешу штриху, и щелевые диа{)рагмы, размещенные по одной лиНИИ с реперными штрихами, первый фазовый растровый датчик угла, включающий осветительную и фотоприемную системы, измерительный и неподвижный индексный диски, а второй фазовый растровый дат чик угла - осветительную и фотоприемную систетлы, измерительный и подвижный индексный диски, фазсюый и реперный выходы и второго фазовых растровых датчиков угла соединены с входами блоKCSB формирования импульсов Старт и Стоп соответственно, выходы которых соединены с управляющими входами первого и второго дешифраторов соответствен но, кодсюые выходы пе{жого и второго фазсюых растровых датчиков утла соединены с соответствующими информационными вхо дами первого и второго дешифраторов, вытсоды которых соединены с соответствующи 6 ми входами , J триггеров, прямые выходы которых соединены с первыми входами элементов И соответственно, выходы которых подктпочены к соответствующим входам блока сбора импульсе,выход которстго соединен со входом счетчика импульсов, выходы которого подключены к соответствующим входам блока 1ш}) индикации, фаз(жый выход первого фазового растрового датчика угла через блок квантования фазы соединен со входом блока задержки счетных импульсов, соответст вующие выходы которого соединены со вторыми входами элементе И, о т л ичающийся тем, что, с целью иовышения точности преобразования, на тельном диске размещеныууУ щелевые диафрагмы по одной линии с реперными штриха ми, а кодовые маски, которые содержат - 1 дискретных участков и t дорожек, расположены между реперными штрихами и щелевыми диа})рагмами, на индексных дисках нанесены кодовые маски jn-l репфных штрихов и радиальных растров через равные интервалы по длине окружности, по одной линии с реперными штрихами размещены i- 1 диафрагм, а кодовые маски содержат 1 дискретных участков и 5 дорожек, и дополнительно введены (hi- 2 ). триггеров и элементов И, первый и второй фазовые растровые датчики угла дополнительно содержат по Wi-. 1 выходов,которые соединены с дополнительными входами блоков формирования импульсов Старт и Стоп соответственно и по -fc кодовых выходов, которые соединены с дополнительными информационными входами первого и второго дешифраторов соответственно, дополнительные выходы которых соединены с соот ветствующими входами (Ы- 2)Vvi триггеров, прямые выходы которых соединены с первыми вxoдfflv и дополнительных элементов И, блок задержки счетных импульсов дополнительно содержит I Vvi - 2) выходов, которые соединены со вторыми входами дополнительных элйч гентав И . Источники информации, принятые во внимание при экспертизе 1.Преснухин Л. Н. , Шаньгин В. Ф и Шаталов Ю. А. Муаровые растровые датчики положения и их применение. М., МашиностроениеJ 1969, с. 93 . 2.Авторское свидетельство СССР по заявке № 2778О16 /18-24, кл. GO8 С 9/06, 07.О6.79 (прототип).
4 f
J-L
э
7
(Puz.i
8
СРиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU822117A1 |
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU822118A1 |
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU849267A1 |
| Преобразователь с электрооптической редукцией | 1981 |
|
SU966722A1 |
| Эталон единицы плоского угла | 2016 |
|
RU2637727C1 |
| Преобразователь угол-код | 1983 |
|
SU1116447A1 |
| Фазоимпульсный преобразователь угловых перемещений | 1975 |
|
SU954821A1 |
| Преобразователь перемещения в код | 1983 |
|
SU1150765A1 |
| Датчик перемещения | 1990 |
|
SU1827717A1 |
| Преобразователь угла поворота вала в код | 1975 |
|
SU543970A1 |