(54) ФОТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗСЖАТЕЛЬ УГЛА ПОВОРОГГА ВАЛА В ЧИСЛО


| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU822117A1 |
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU849266A1 |
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU849267A1 |
| РАСТРОВЫЙ ПРЕОБРАЗОВАТЕЛЬ «ПЕРЕМЕЩЕНИЕ — ФАЗА — НАПРЯЖЕНИЕ» | 1973 |
|
SU393760A1 |
| Эталон единицы плоского угла | 2016 |
|
RU2637727C1 |
| Устройство для определения абсолютного положения вала исполнительного механизма | 1988 |
|
SU1781822A1 |
| Отсчетное устройство кодовогоТЕОдОлиТА | 1979 |
|
SU802782A1 |
| Преобразователь угол-код | 1983 |
|
SU1116447A1 |
| Устройство для измерения угла поворота вала | 1990 |
|
SU1772629A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА В ПОСЛЕДОВАТЕЛЬНОСТЬ ИМПУЛЬСОВ | 1991 |
|
RU2025043C1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в цифровых следящих системах и системах управления объектами, содержащих ЦВМ. Известны цифровые преобразователи, угла (ЦПУ), основанные на использовании механической развертки кв;антуЮ(дей шкалы 1, .2 . ЦПУ такого типа называются параметрическими ЦПУ, Их особенностями являют ся наличие опорного и сигнальнот-о чувствительных элементов, которые во взаимодействии с квантующим элементом, связан HbiM с приводом, осуществляют преобразование квантованной величины в электрическую г Квантующий и чувствительный элементы характеризуются наличием определенного числа зон состояний, кoтqэыe отличаются Друг от друга. Так, например, для индуктивных и емкостных датчиков углаэто зубцовые впадины, для фотоэлектрических датчиков угла - пр зрачность в непрозрачность и т.д. fs. Недостатком данных ЦПУ является ввзкая точность .преобразования угла в коо обусловленная трудностями изготовленяя квантующей шкалы с малой дискретностью. Известен параметрический ЦПУ, содержащий привод, связанный с ним магнитньЕй барабан, на аоеерхности которого вме« ются две дорожки, три считывающие гоповки (системы), блок цифрового отсчета, состоящий из вентиля, триггера н счетчика, причем на одной из них нанесена оона риска (реперный - штршс) в виде намагниченной полоски, а на другой - нанесены через равные интервалы квантующие риски. Напротив первой дорожки расположены две сьемные головки, одна из которых неподвижна, а Щ)угая - связана с валом, угол поворота которого преобразуется в код. Головки связаны со старт- и стоавходами триггера управляющего вентилем, третья головка, формирующая счетные импульсы, расположена напротив второй дорожки 2. Недостатками этого гфеобразователя явл5потся низкая точность нанесения магнитных рисок на барабанj невысокая плотность записи рисок на единицу длины квантующей дорожки. Наиболее близким к предлагаемому по технической сущности является преобразователь, основанный на фотоэлектрическом принципе съема информации и содержащий корпус, Щ)ивод, посаженный на его вал диск с измерительным радиальным растром, диск с индексным радиальным растром, установленный на измеряемом валу, диск с индексным радиальным растром, закрепленный жестко в корпуде, осветитель ные и фотоприемные системы, блоки форми рования старт- и стоп-сигналов, блок управления, счетчик импульсов и блок цифре вой шшвкааии 4j. Данкое устройство характеризуется относительно невысокой точностью измерений, обусловленной невысокойточностью фс мирования старт- и стоп-импульсов и псярешностью квантующей шкалы. Цель изобретения - повышение точности фотоэлектрического преобразователя уг ла поворота вала в число. Поставленная цель достигается тем, что в фотоэлектрическом преобразователе угла поворота вала в число, содержащем ксрпус, в котором Жестко закреплен непо движнь1й индексный диск с радиальным растром, привод, на валу котсч ого расположен измерительный диск с радиальным «растром, подвижный индексный диск с радиальным растром,: установленный на измеряемом валу, растровые датчики угла, включающие осветительные и фотоприемные системы, первый фазовый растровый датчик угла содержит измерительный и неподвижньй индексный диски с радиальными растрами, а второй - измерительный и неподвижный индексный диск с-радиальными растрами, блоки фсрмирования старт- и стоп-сигналов, первы и второй выходы блока формирования старт-сигнала соединены с первым и вто рым входами блока управления соответственно, первый и выходы блсжа фор мирования стоп-сигнала соединены с третьим и четвертым входами блока управле ния соответственно, счетчик импульсов, выходы которого подключены к соответст вующим входами блока цифровой индикаци
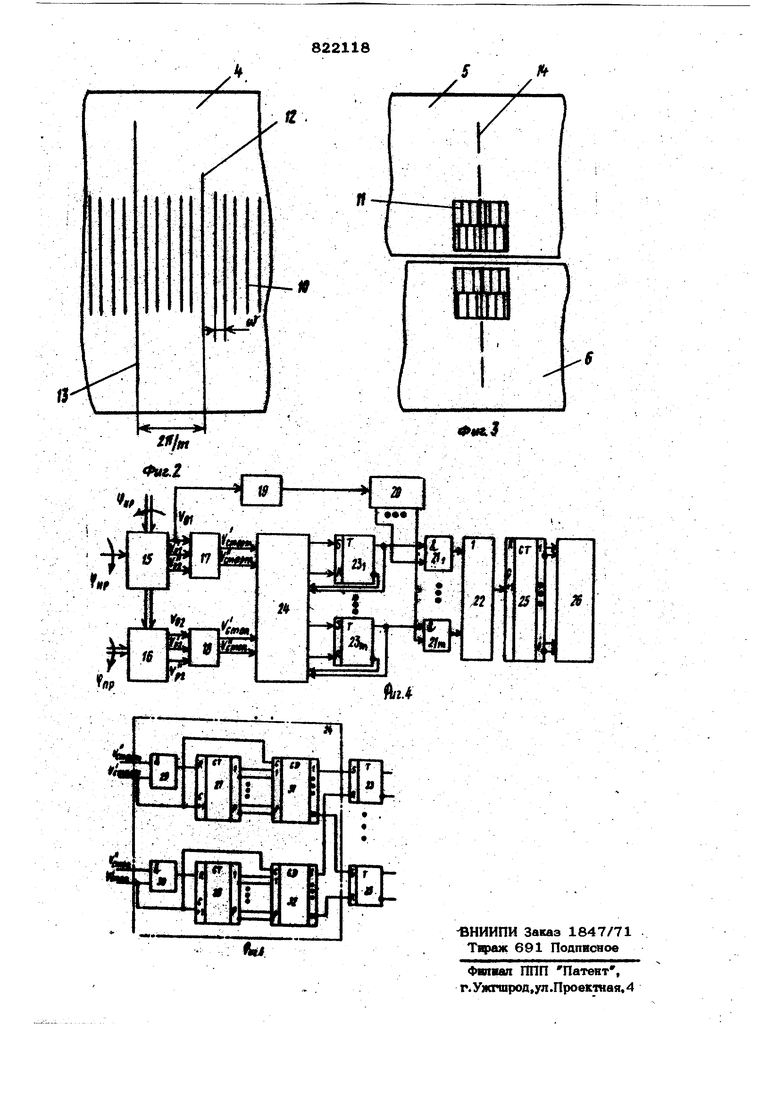
на измерительном, индексных подвижном и неподвижном дисках с радиальными растрами дополнительно расположены реперные
и 3 показаны соответственно часть измерительного диска и часть подвижного и неподвижного индексных дисков} на штрихи, на измерительном диске с радййПьными растром-расположено hi реперкых штрихов, которые нанесены через равные интервалы по всей длине его окружности, а один из них выполнен по отношению к другим удлиненным, на индексных дисках с радиальными, растрами расположено, по два реперных штриха, которые нанесены один над ;фугим, введены блок квантования фазы, блок задержки счетных импульсов и блок импульсов, уп элементов И и Ум триггеров, прямые выходы которых соединены с первыми входами элементов И, выходы которых подключены к соответствующим входам блсжа сбора импульсов, выход KOTqporo соединен со входом счетчика импульсов, фазовьй выход первого фазового растрового датчика упла соединен с одаим входом блока формирования старт-сигнала и входом блока квантования фазы, выход которого соединен с блоков задержки счетных импульсов, соответствующие выходы соединены со вторыми входами элементов И, реперные выходы первого фазового растрового датчика угла соединены с щэугими соответствующими входами блока формирования старт-сйгнала, фазовые и реперные выходы втсрого фазового растрового датчика угла соединены с соответствующими входами блока формирования стоп-сигнала, выходы блока управления подключены к соответствующим входам hi триггеров. Кроме того, блок управления содержит дешифраторы, счетчики импульсов и элементы И, выход первого элемента И соединен со входом установки: нуля первого счетчика импульсов, выходы которого соединены с соответствующими входами первого дешифратора, выходь которого подключены к соответствующим входам установки в единицу In триггеров, выход второго элемента И соединен со входом установки в ноль-второго счетчика импульсов, выходы которого соединены с соответствующими входами вторсмго дешифратора, вькоды которого подключены к соответствующим входам установки в ноль tti триггеров, второй и четвертый входы блока управления соединены со счетными входами Первого и второго счетчика импульсов соответственно и с управляющими входами первого и второго дешифраторов. На фиг. 1 изображена схема конструкции преобразователя, общий вид; на фиг. 2 5Й фиг. 4 и 5 изображены структурные сэсемы преобразователя и блока управления. Фотоэлектрический преобразователь уг ла поворота вала в число содержит корпу 1, привод 2j вал 3 привода измерительный диск 4 .с радиальным растром, неподвижный диск 5 с радиальным растром подвижный диск 6 с радиальным растром вал 7, угловое положение которого преоб разуется в код, осветительную систему 8 фотоприемную систему 9, измерительный радиальный растр 10, индексные радиальные растры И, которые реперные штрихи 12, удлиненный реперньй штрих 13, индексные реперные штрихи .14, фазовые растровые датчики 15 и 16 угла, блоки 17 и 18 формирования старт и стоп-сигналов; блок 19 квантования фазы; блок 2 задержки счетных импульсов; элементы И 21; блок 22 сбора импульсов, триггеры 23; блок 24 управления, счетчик 25 им: пульсов; блок 26 цифровой индикации; счетчики 27 и 28 импульсов; элементы И 29 и ЗО; дешифраторы 31 и 32. На фиг. 1-5 введены следующие обозначения:-угловой шаг штрихов радиального растра Ю; V ««Ч -соответственно угловые мр НР пр положения измерительного, неподвижнсяго и подвижного индексных растровых дисков 4-6; -соответственно напряжения фазовых выходов датчиков угла 15 и 16; v v 1,а . Pt.a соответсгвенно напряжения реперных выходов датчиков 15 и 16; v v соответственно старт-и стерт стоп стоп-сигнальи Для устранения погрешности от эксцент риситета дисков 4-6 фазовые каналы дат чиков 15 и 16 выполнены с двухсторонним считьшанием (фиг. 1). Угловое расстояние между реперными штрихами 12 и 12 и 13 равно 2K/ni . Осветительная 8 и фотоприемная 9 системы, диски 4 и 5 в ссйвокупности представляют собой датчик 15, а осЬетительная 8 и фотоприемная 9 системы, дис ки 4 и 6 - датчик 16, которые содержат фазовый и реперный каналы сьема ивфор мации (фиг. 1-3). Фотоэлектрический преобразователь работает следующим образом. При постоянном вращении приводом 2 диска 4 с фазовых выходов датчиков 15 и 16 снимаются нагфяжения VQ. 86 зь оторых Qi-(,,p - „р ),qj nP линейно зависят в пределах шага W от разностей угловых положений дисков 4 и 5 и 4 и 6 соответственно. Эти напряжения nocrynaioT на блоки формирования старт- н стоп-сигнале® 17 и 18 и блок 19 квантования фазьи Последний формирует один счетный импульс на каждое приращение фазы, равное . - , что соответствует шагу квайтования угла на величину -К- . В момент , когда удлиненный реперный штрих 13 диска 4 прсасодит мимо реперных штрихе 14 неподвижного индексного диска 5, на реперных выходах датчика 15 вырабатываются напряжения Un и (Jn , которые поступают Н41 блок 17 формирования старт- сигнажж, в котором Up, U для боп точней фиксации угловся о поло- л жения старта стробируется импульсом, вырабатываемым в момент ©f 0. В результате на вькодах 17 вырабатывают. ся импульсы VCTQP и Vjj-fgpi-,поступающие на вход блока 24 управления. Последний запускает триггер 23 в стартовое (единичное) состояние. При этом открывается элемент И 21, и счетные импульсы с первого выхода блрка 2О задержки счетных импульсов начинают проходить через элемент К 21 и блеж 22 сбора импульсов на вход счетчика 25 импульсов..; После этого совмещение с реперным штрихом 14 диска 5 каждого из () реперных штрихов 12 диска 4 приводит . к поочередному запуску в стартовое состояние соответственно триггеров 23 и каждый раз со стартом очерепного тригг а 23 счетчик импульсов 25, продолжая подсчет счетных импульсов, вызванHbix стартами предыдущих триггеров 23, начинает дополнительно подсчет счетных импульсов, снимаемьос со следующего по порядку выхода блока 20 задержки счетных импульсов. Когда удлиненньй реперный штрих 13 диска 4 проходит мимо реперных штрихов 14 подвижного диска 6, на реперкых выходах Датчика 16 вырабатываются напряжения Upa. и Uoj аналогичным образом блсж формирования стоп-сигнала 18 вырабатьюает У .Т.ОП , cTon KOT(4)bie, поступая на входы блока 24 управления, устанавливают тригер 23 в состояние Стоп. Элемент 21 при этом закрывается. После этсяо совещение {эеперного штриха 14 диска с каждым нз (rti-1) оставшихся штрихов, 12 измерительного диска 4 приводит поледовательно к возврату всех (Ии-1) триггеров 23 в сосгояние Стоа и закрыванто (И1-1) элементов И 21; В момент, когда закроется последний из открытых элеменгов И 21 подсчет импульсов прекращается и счетчик 25 импульсов зафиксирует код равный кодов ,,. ц, I каждый из котфых яв ляется цифровым эквивалентом углового положения подвижного индексного диска. 6 относительно неподвижного индексного диска 5, т.е. Ч - Чпр-Мнр i Среднеарифметический код .N i является конечным результатом преобразования угла поворота вала в число. Высокая точность, которая- может быт получена с помощью предлагаемого ЦПУ объясняется тем, что за два оборота диска 4 , т.е. за один цикл механической развертки квантующей шкалы, производится W стартстопных преобразований угла в код. Причем каждое из преобразований осуществляется, использованием для фор- М1фования старт-, стоп-сигналов исчет- ных импульсов разных участке® растровой дорожки диска 4(квантующей шкалы), име ющей погрешности, разные по величине и знаку на разных ее участках, так как в противном случае она не вносила бы погрешности, зависящей от кодируемого угла и могла быть учтена при градуировке характеристики преобразования, Блок 24 управления (фиг. 5) работает следующим образом., В момент появления сигналов V старт сторт ® выходе схемы совпадения 2 на возникает импульс совпадения, который устанавливает счетчик 27 в нулевое состояние. Одновременно импульс V старт поступает на счетчик 27. На выходе последнего появляется кодовая комбинация, соответствующая номеру первот-о старта. Дешифратор 31 расшифровывает ее и стоп Т поступая на управляющий вход дешифрэгора 31, приводит к появлению н выходе, связанном с триггером 23, единичного сигнала, который запускает его в стартовое состояние. В дальнейшем каждый очередной V старт подсчитывается счетчиком импульсов 27 и считывает с выхода Дешифратора 31 импульс старта следующего триггера 23, Аналогичным о разом работает часть схемы 24, связанная со стоповыми сигналами V .. t Технико вкономическвй эффект от использования преобразователя определяетс высокой точностью аа{. счет -кратисто стартстопного преобразования угла коп за один цикл развертки квантующей калы при использовании для формирования игналов М старт .Vcton нечетных мпульсов разных ее участков; абсолютным тсчетом углов при наличии одной квантующей шкалы. Формула изобретения 1.Фотоэлектрический преобразователь угла поворота вала в число, содержащий корпус, в жестко закреплен неподвижный индексный диск с радиальным растром, привод, на валу которого расположен измерительный диск с радиальным растром, подвижный индексный диск с радиальным растром, установленный на измеряемом валу, фазовые растровые датчики угла, включающие осветительные к фотоприемные системы, первый фазовый растровый датчик угла содержит измерительный и неподвижный индексный диски с радиальными растрами, а второй - измерительный и подвижный индексный диски с радиальными растрами, блоки формирования старт- и стоп-сигналов, первый и вто рой вь1ходы блсжа формирования стартсигнала соединены с первым и вторым входами блока управления соответственно, первый и второй выходыблсжа формирования стоп-сигнала соединены с третьим и четвертым входами блока управления, счетчик импульсов, выходы которого подключены к соответствующим входам бл(жа цифровой индикации, отличаюп1ийс я тем, что, с целью повьпления точности преобразователя, на измерительном, индексных подвижном и неподвижном дисках с радиальными растрами дополнитель- , но расположены реперные штрихи, на измерительном диске с радиальным растром расположено Ы реперных штрихов, которые нанесены через равные интервалы по всей длине его окружности, а один из них выполнен по отношению к другим удлиненным, на индексньос дисках с радиальными растрами расположено по два реперных штриха, которые нанесены один над щзугим, введены блок квантования фазы, блок задержки ;четных импульсов и блок сбора импульсов, Vv) элементов И и Wi триггеров, прямые выходьг которых соединены с первыми вхоД(ми элементов И, выходы которых подключены к соответствующим входам блока сбора импульсов, выход которого соединен со входами счетчика импульсов, фазовый выход первого фазового растрового датчика угла соединен с одним входом блока форми®рования старт-сигнала и входом блока квант жания фазы, выход которого соедя.нен с блоком задержке счетных импульсса .соответствующие выходы к6)орсго соединены со вторыми входами элементов И, реперные выходы перв(7О фазового растрового датчика угла соедин ы с другими соответствующими входами 6л(Жа формиро вания старт-сигнала, фазовые и реповые выходы второго растровего датчика угла соединены с соответствующими входами блока формирования стоп-сигнала выходы бл(жа управления подключены к соЬг{ветствуюшйм входам н тригг ов, 2. Преобразователь по п. 1, о т л ичающийся тем, что блок управления содержит дешифраторы, счетчики импульсе и элементы И, выход первого элемента И соединен со аховом установки нуля перв( счетчика импульсов, вькойш которого соединены с соответствующими входами первого дешифратора, вых;оды которого подключены х соответствующим входам установки в единицу Ш триггеров, выход второго элемента И соединен со входом установки в ноль второго счетчвtf Uii118 ка импульсов, выходы которого соединены с соответствующими входами второго дешифратора, выходы которого подключены к соответствующим входам установки в ноль m триггеров, второй и четвертый входы блока уп равления соединены со счегнымн входами первого и второго счетчика импульсоь соответственно и с у|фавляющими входами пер&ого и второго дешифраторов. Источники ннформации, принятые во внимание прн экспертизе 1.Гитис Э. .И. Г еобразсжатели информации для электронных цифровых -лъчислительных устрснИств. М.-Л., Госэнер оиздат, 1961, р. 222. 2.Филиппов Д Г. Цифраторы перемещений. М., Воениздат, 1965, с. 13О. 3.Зверев А. Е., Максимов В. П., Мясник ж В. А. 1%«образователи угловых перемещений в цифровой код. Л., Энергия, 1974, с. 11, 4.Преснухин Л. Н., Шаньгин В. Ф. и Шаталсв Ю. А. Муефовые растровые датчики положения и их применение М., Ма шиностроенйе, 1969, с. 93 (прототип).
