Изобретение относится к электро- энергетике и предназначено для«автоматической настройки -компенсации емкостной и активной составляющих тока однофазного Замыкания на землю в режимах глухого и перемежающегося дугового однофазных замьгканий в трехфазных сетях.
Целью изобретения является расширение функциональных возможностей и повышение быстродействия.
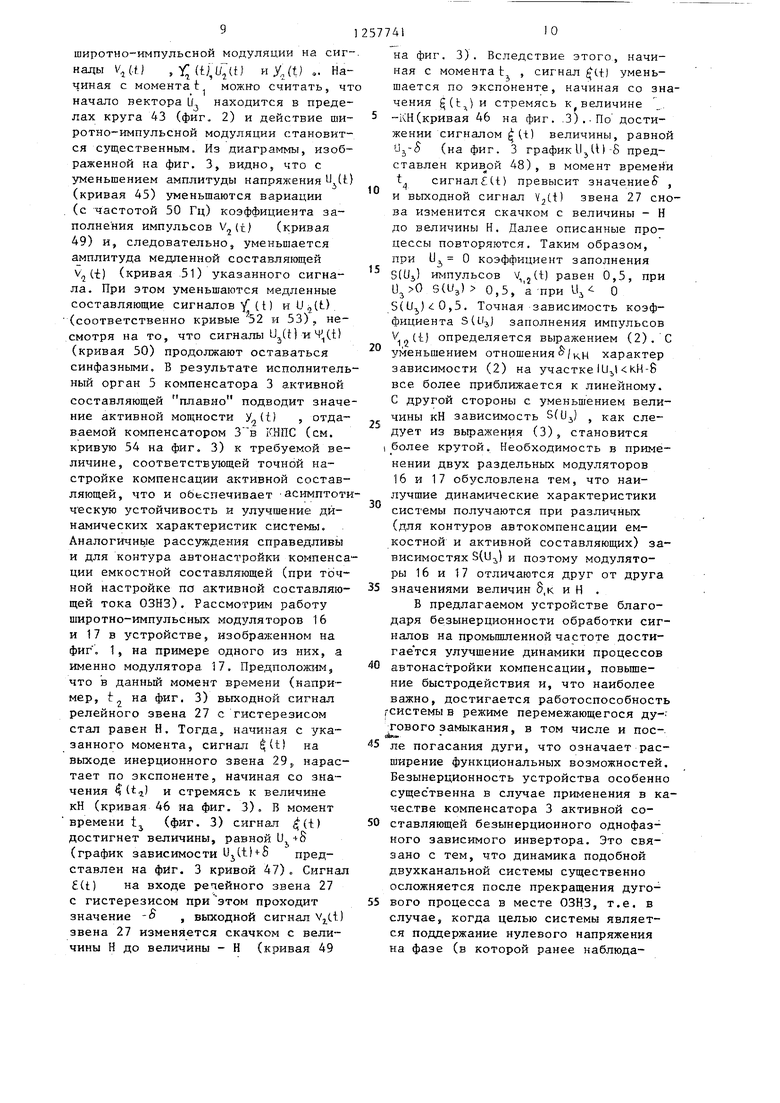
На фиг. 1 показана функциональная схема предлагаемого устройства; на фиг. 2 - векторные диаграммы, поясняющие работу устройства; на фиг. 3 - временные диаграммы.
На фиг. 1 позицией 1 обозначена трехфазнйя сеть, с которой связаны дугогасящий реактор 2 (ДГР) и компенсатор 3 активной составляющей (КАС). Исполнительные органы дугогасящего реактора 2 и компенсатора 3 активной составляющей обозначены соответственно позициями 4 и 5. В качестве исполнительного органа 4 дугогасящего реактора может выступать, например, привод реактора плунжерного типа, а в качестве исполнительного органа 5 (КАС) - последовательно соединенные интегратор и управляемый выпрямитель (если компенсатор 3 выполнен в виде однофазного зависимого инвертора). Датчиком 6 напряжения смещения нейтрали и датчиками 7-9 фазных напряНИИ блока 13 выбора поврежденной ф зы. Второй вход второго множительн го звена 19 через второе релейное звено 23 подключен к выходу, датчик 5 6 напряжения б (t) смещения нейтрал Выходы фазовых детекторов 14 и 15 подключены соответственно к входам исполнительных органов 4 и 5 дугог сящего реактора и компенсатора акт ной составляющей, Широтно-импульсн модуляторы 16 и 17 содержй т послед вательно включенные элементы 24 и вычитания, релейные звенья 26 и 27 гистерезисом и инерционные звенья 28 и 29 (инерционные звенья 1 и 2) При этом входами модуляторов 16 и являются входы элементов 24 и 25, ходами же модуляторов 16 и 17 служ выходы звеньев 26 и 27.
На фиг. 2 позицией 30 обозначен
10
15
20
25
30
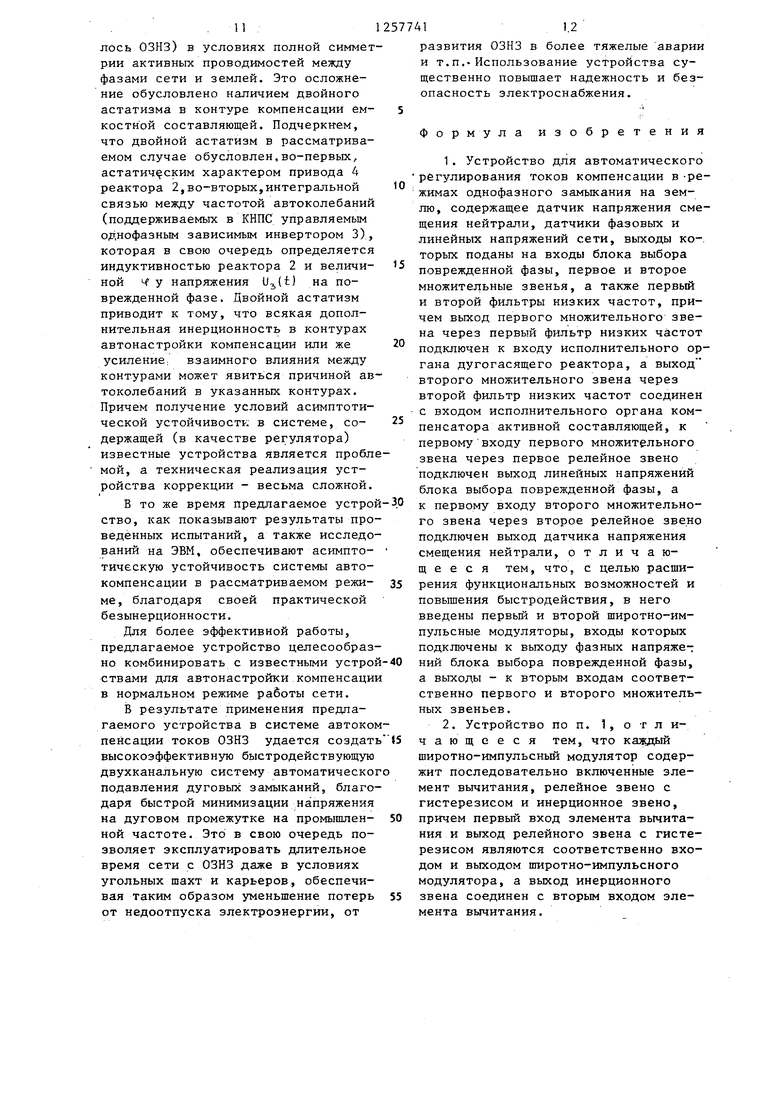
вектор фазной ЭДС Е источника пов режденной фазы, векторы 31 и 32 фа ных ЭДС источников неповрежденных вектор 33 линейной ЭДС между непов режденными фазами, векторы 34 и 35 напряжения Е смещения нейтрали п различных расстройках компенсации костной и активной составляющих, в торы 36-39 напряжения U, на повре денной фазе при различных расстрой ках компенсации емкостной и активной составляющих, 40-42 - геометри ческие места точек концов векторов напряжения И смещения нейтрали с
жений сети (ДФА,- ДФВ, ДФС) может слу- 35 ответственно при недокомпенсации.
жить, например, трехфазный измерительный трансформатор напряжения. Датчиками линейных напряжений сети являются элементы 10-12 вычитания. Выходы перечисленных выше датчиков подключены к входам блока 13 выбора поврежденной фазы. Предлагаемое устройство включает в себя также два фазовых детектора 14 и 15 и два широтно-им- пульсных модулятора 16 и 17 (ШИМ 1
и ШИМ 2). Фазовые детекторы 15 и 14 в свою очередь состоят из множительных звеньев и фильтров низких частот. Входы модуляторов 16 и 17 подключены к выходу фазных напряжений блока 13 выбора поврежденной фазы, а выходы - к первым входам множительных звеньев 18 и 19, выходы которых в СВОЮ очередь соеди ены с входами фильтров 20 и 21 низких частот. Второй вход первого множительного звена 18 через первое релейное звено 22 под- подключен к выходу линейных напряже
57741
НИИ блока 13 выбора поврежденной фазы. Второй вход второго множительного звена 19 через второе релейное звено 23 подключен к выходу, датчика 5 6 напряжения б (t) смещения нейтрали. Выходы фазовых детекторов 14 и 15 подключены соответственно к входам исполнительных органов 4 и 5 дугогасящего реактора и компенсатора активной составляющей, Широтно-импульсные модуляторы 16 и 17 содержй т последовательно включенные элементы 24 и 25 вычитания, релейные звенья 26 и 27 с гистерезисом и инерционные звенья 28 и 29 (инерционные звенья 1 и 2). При этом входами модуляторов 16 и 17 являются входы элементов 24 и 25, выходами же модуляторов 16 и 17 служат выходы звеньев 26 и 27.
На фиг. 2 позицией 30 обозначен
10
15
20
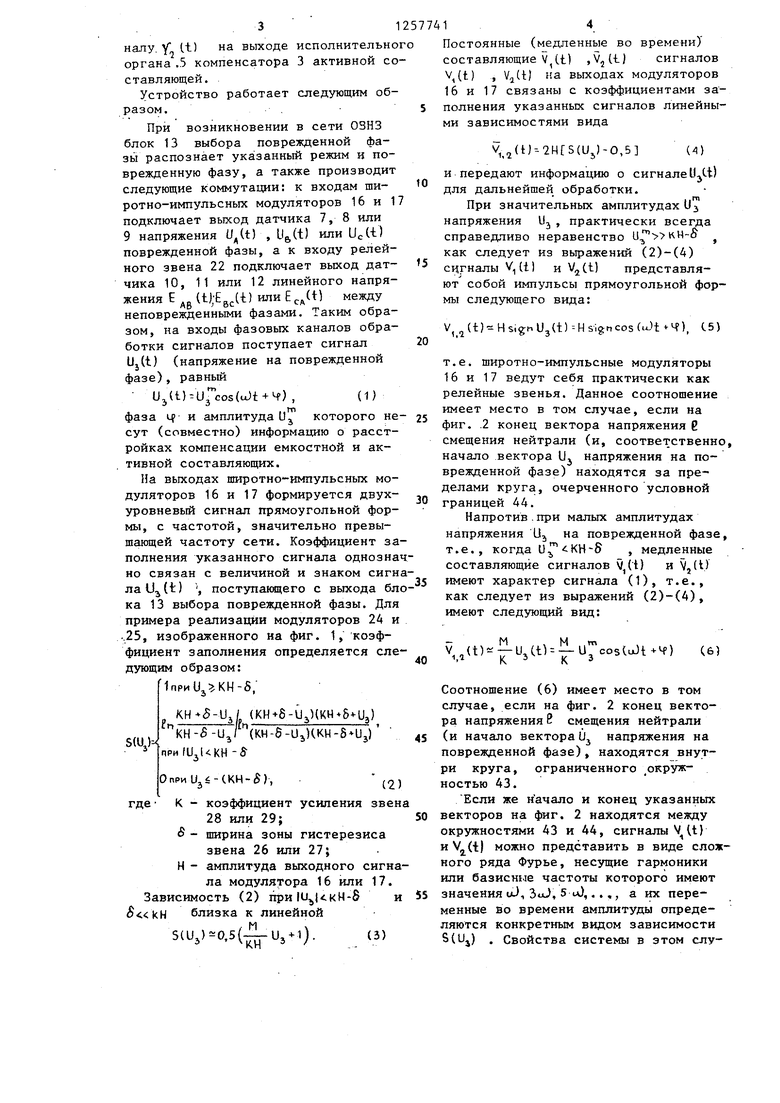
вектор фазной ЭДС Е источника поврежденной фазы, векторы 31 и 32 фазных ЭДС источников неповрежденных фаз, вектор 33 линейной ЭДС между неповрежденными фазами, векторы 34 и 35 напряжения Е смещения нейтрали при различных расстройках компенсации емкостной и активной составляющих, векторы 36-39 напряжения U, на поврежденной фазе при различных расстройках компенсации емкостной и активной составляющих, 40-42 - геометри- ческие места точек концов векторов напряжения И смещения нейтрали со
точной компенсации и перекомпенса- цки по активной составляющей, окружности 43 и 44, соответствующие по- лоз ениям начала вектора напряжения и, на поврежденной фазе при разО
личном влиянии щиротно-импульсных модуляторов 16 и 17 на функционирование систека.
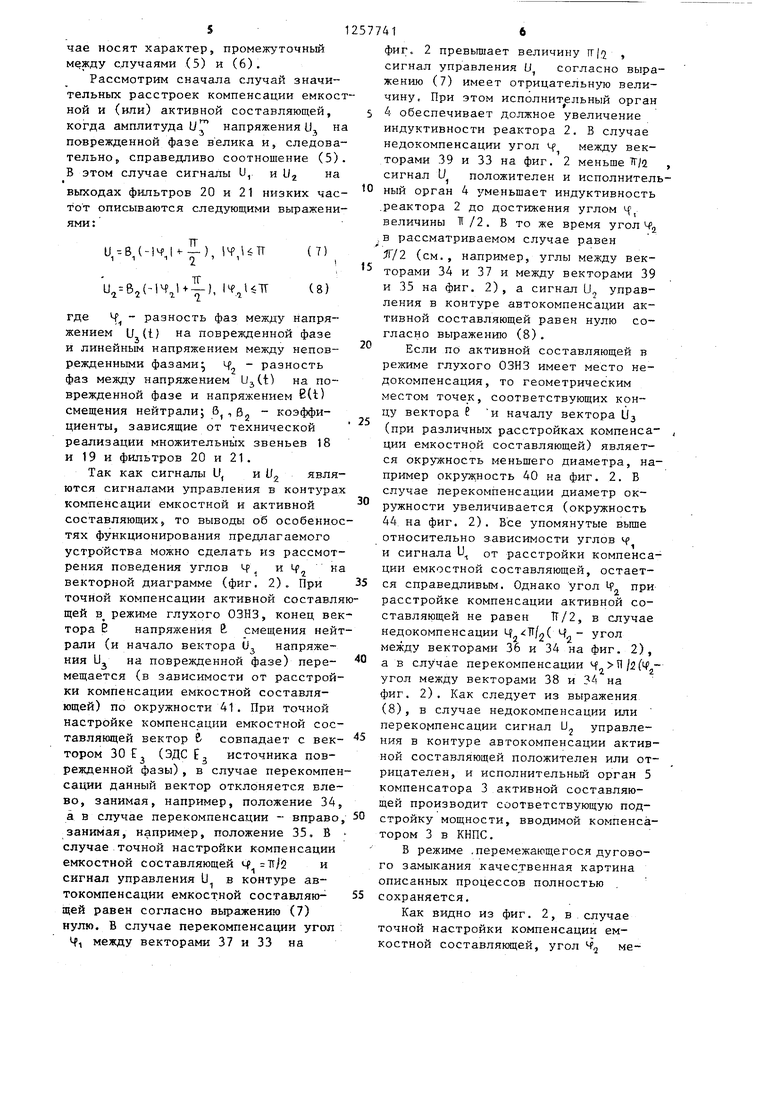
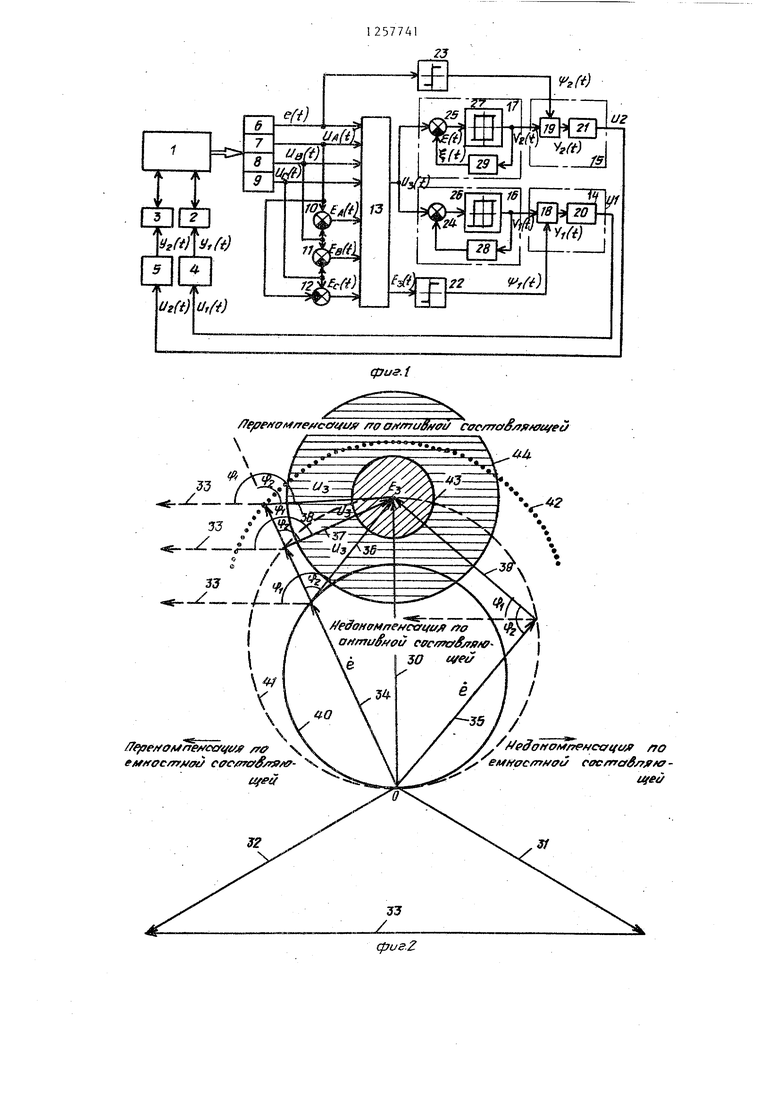
На фиг. 3 кривая 45 изображает напряжение Uj(t) на поврежденной фазе, а кривая 46 - сигнал (i) на выходе инерционного звена 29. Кривые 47 и 48 - вспомогательные, служащие для пояснения принципа действия модуляторов 16 и 17. Кривая 49 соответст- вует сигналу ) на выходе модулятора 17, кривая 50 г сигналу Ч (i) на выходе релейного звена 22 кривая 51 - медленной составляющей V Ct)
сигнала Vj(t) , кривая 52 - сигналу у (t) на выходе множительного звена 19, кривая 53 - сигналу U(i} на выходе фильтра 21, кривая 54 - сигналу, у (.t) на выходе исполнительно органа .5 компенсатора 3 активной составляющей.
Устройство работает следующим образом..
При возникновении в сети ОЗНЗ блок 13 выбора поврежденной фазы распознает указанный режим и поврежденную фазу, а также производит следующие коммутации: к входам ши- ротно-импульсных модуляторов 16 и 1 подключает выход датчика 7,8 или 9 напряжения U(t) , Lle,(t) или UcH) поврежденной фазы, а к входу релейного звена 22 подключает выход датчика 10, 11 или 12 линейного напряжения Е ,„ () или Е„() между
АВ
ЛВС
HenoBpeJKfleHHbiMH фазами. Таким образом, на входы фазовых каналов обработки сигналов поступает сигнал Uj(t) (напряжение на поврежденной фазе), равный Ujdl Uj osdJi + M-) , (1)
фаза ц и амплитуда и J которого не сут (совместно) информацию о расстройках компенсации емкостной и активной составляющих.
На выходах широтно-импульсных модуляторов 16 и 17 формируется двухуровневый сигнал прямоугольной формы, с частотой, значительно превышающей частоту сети. Коэффициент заполнения указанного сигнала однознано связан с величиной и знаком сигн
ла Uj (t) , поступающего с выхода бло ка 13 выбора поврежденной фазы. Для примера реализации модуляторов 24 и ..25, изображенного на фиг. 1, коэффициент заполнения определяется следующим образом:
lnpMUj5 KH-5;
S(UJ„ КН(5-и,/ (KH+6-UJ{KH+5 -U,) СП..., л .. tn- KH-fi-Uj/ (KH-a-UjJCKH-S Uj) npMfU l KH -8
Оприи,-(КН-(5),
где
К - коэффициент уснпения звена
28 или 29;
5 - ширина зоны гистерезиса
звена 26 или 27; Н - амплитуда выходного сигнала модулятора 16 или 17. Зависимость (2) при|и,КкН-8 и 5«kH близка к линейной
5(из)-0,5(и,-1). (3)
to
t5
20
25
30
35
Постоянные (медленные во времени) составляющие ) ,V,j(t) сигналов ) , V,i(t) на выходах модуляторов 16 и 17 связаны с коэффициентами заполнения указанных сигналов линейными зависимостями вида
v;,)--2HfS(Uj)-0,B (4)
и передают информацию о сигнале Ujtt) для дальнейшей обработки.
При значительных амплитудах Uj напряжения Uj, практически всегда справедливо неравенство и.кН- как следует из выражений (2)-(4) сигналы V,(t) и VjCt) представляют собой импульсы прямоугольной формы следующего вида:
V,(t) Hsig:f U3(t)--Hsig:ncos(), t5)
т.е. широтно-импульсные модуляторы 16 и 17 ведут себя практически как релейные звенья. Данное соотношение имеет место в том случае, если на фиг. .2 конец вектора напряжения 6 смещения нейтрали (и, соответственно, начало вектора Uj напряжения на поврежденной фазе) находятся за пределами круга, очерченного условной границей 44.
Напротив.при малых амплитудах напряжения U на поврежденной фазе, т.е., когда , медленные составляющие сигналов V,(t) и Vj(U имеют характер сигнала (1), т.е., как следует из выражений (2)-(4), имеют следующий вид:
40
V,(t))(uJt+4) (6)
45
)
а
50
55
Соотношение (6) имеет место в том случае, если на фиг. 2 конец вектора напряжения В смещения нейтрали (и начало вектора U напряжения на поврежденной фазе), находятся внутри круга, ограниченного окруж- ностью 43.
Если же начало и конец указанных векторов на фиг. 2 находятся между окружностями 43 и 44, сигналы ) и (i можно представить в виде сложного ряда Фурье, несущие гармоники или базисные частоты которого имеют значения UL), 3uJ, 5 и),..,, а кх переменные во времени амплитуды определяются конкретным видом зависимости S(Uj) . Свойства системы в этом случае носят характер, промежуточный между случаями (5) и (6).
Рассмотрим сначала случай значительных расстроек компенсации емкостной и (или) активной составляющей, когда амплитуда и Г напряжения Ll на поврежденной фазе в елика и, следова- тельнор справедливо соотношение (5). В этом случае сигналы U, и U-j на
выходах фильтров 20 и 21 низких частот описываются следующими выражениями :
ТТ
12577416
фиг. 2 превышает величину тг|2 сигнал управления U согласно
жению (7) имеет отрицательную чину. При этом исполнительный 5 4 обеспечивает должное увеличе индуктивности реактора 2, В сл недокомпенсации угол Ц между 39 -торами
сигнал
10
), 1Ч ,
7)
«5
и 33 на фиг. 2 меньше Ц положителен и испол ный орган 4 уменьшает индуктив .реактора 2 до достижения углом величины 1/2. В то же время у ,в рассматриваемом случае равен Г/2 (см. , например, углы между торами 34 и 37 и между вектора и 35 на фиг. 2), а сигнал U у ления в контуре автокомпенсаци тивной составляющей равен нулю гласно выражению (8).
и.6.
(ЧЧ.иЬ),
(8)
где Ч - разность фаз между напря
жением U (t) на поврежденной фазе и линейным напряжением между неповрежденными фазами Ч , разность фаз между напряжением UjCt) на поврежденной фазе и напряжением B(t) смещения нейтрали; В , 0 - коэффициенты, зависящие от технической реализации множительных звеньев 18 и 19 и фильтров 20 и 21.
Так как сигналы Ц и 0 являются сигналами управления в контзфах компенсации емкостной и активной составляющих то выводы об особенностях функционирования предлагаемого устройства можно сделать из рассмотрения поведения углов Ч , и Lf на векторной диаграмме (фиг. 2). При точной компенсации активной составлящей в режиме глухого ОЗНЗ, конец вектора Е напряжения 2. смещения нейтрали (и начало вектора U напряжения и, на поврежденной фазе) пере- мещается (в зависимости от расстройки компенсации емкостной составляющей) по окружности 41. При точной настройке компенсации емкостной составляющей вектор & совпадает с век- тором 30 Е, (ЭДС Е, источника поврежденной фазы), в случае перекомпенсации данный вектор отклоняется влево, занимая, например, положение 34, а в случае перекомпенсации - вправо, занимая, например, положение 35, В случае точной настройки компенсации емкостной составляющей Ч -ТГ/2 и сигнал управления U в контуре ав- токомпенсацИи емкостной составляю- щей равен согласно выражению (7) нулю. В случае перекомпенсации угол MI, между векторами 37 и 33 на
фиг. 2 превышает величину тг|2 сигнал управления U согласно
выражению (7) имеет отрицательную величину. При этом исполнительный орган 5 4 обеспечивает должное увеличение индуктивности реактора 2, В случае недокомпенсации угол Ц между век- 39 -торами
сигнал
0
5
0
5
0
5 5
0
и 33 на фиг. 2 меньше 7Г/2 , Ц положителен и исполнительный орган 4 уменьшает индуктивность .реактора 2 до достижения углом tf величины 1/2. В то же время угол ,в рассматриваемом случае равен Г/2 (см. , например, углы между векторами 34 и 37 и между векторами 39 и 35 на фиг. 2), а сигнал U управления в контуре автокомпенсации активной составляющей равен нулю согласно выражению (8).
Если по активной составляющей в режиме глухого ОЗНЗ имеет место не- докомпенсация, то геометрическим местом точек, соответствующих концу вектора и началу вектора УЗ (при различных расстройках компенса . ции емкостной составляющей) является окружность меньшего диаметра, например окружность 40 на фиг. 2. В случае перекомпенсации диаметр окружности увеличивается (окружность 44. на фиг. 2). Все упомянутые вьппе относительно зависимости углов у и сигнала от расстройки компенсации емкостной составляющей, остается справедливым. Однако угол if при расстройке компенсации активной составляющей не равен ТТ/2, в случае недокомпенсации ( угол между векторами 36 и 34 на фиг. 2), а в случае перекомпенсации Ч, П/2(Ч 2- угол между векторами 38 и ЗА на фиг. 2). Как следует из выражения (8), в случае недокомпенсации или перекомпенсации сигнал U управления в контуре автокомпенсации активной составляющей положителен или отрицателен, и исполнительный орган 5 компенсатора 3 активной составляющей производит соответствующую подстройку мощности, вводимой компенсатором 3 в КНПС.
В режиме .перемежающегося дугового замыкания качественная картина описанных процессов полностью сохраняется.
Как видно из фиг. 2, в случае точной настройки компенсации емкостной составляющей, угол 4,j ме
няется скачком от О до тг при пере ходе от недокомпенсации к перекомпенсации по активной составляющей (и наоборот от ТТ до О при переходе от перекомпенсации к недокомпенсации) . В случае точной настройки компенсации активной составляющей угол f меняется скачком от О до ТГ при переходе от недокомпенсации к перекомпенсации по емкостной составляющей (и наоборот), Следовательно, в том случае, если сигналы V описываются выражением (5), сигналы управления U, и U претерпевают разрывы в точке точной наст 1 ройки компенсации, что приводит к автоколебаниям в обоих контурах настройки компенсации. Подобная взаиная релейность характеристик контуров автокомпенсации емкостной и активной составляющей не позволяет обойтись на входах фазовых детекторов 14 и 15 идеальными релейными звеньями. Применение широтно-импул ных модуляторов 16 и 17 устраняет данный недостаток. Действительно в результате описанных процессов автнастройки, погрешность настройки компенсации оказалась достаточно малой, что привело к уменьшению на пряжения Uj на поврежденной фазе, в результате соответствующий ему вектор оказался в пределах круга, раниченного на фиг. 2 окружностью 43. Сигнал , 2.(t) в этом случае опр деляется из выражения (6), а сигна управления U и Uj описьгааются сдующими соотношениями:
(9) Ч, (Ю)
Геометрической интерпретацией на фиг. 2 выражения (9) является проек- ция вектора и на вектор 33 - линейной ЭДС между неповрежденными фазами, а выражения (10) - проекция вектора LJ на вектор Е . Благодаря тому что амплитуда U напряжения йа пов- режденной фазе входит в качестве множителя в выражения (9) и (10), достигается плавное (без скачков) уменьшение сигналов U и U управления при. подходе системы к точной настройке компенсации емкостной и активной составляющих, несмотря на наличие разрывов в зависимостях фаз
Ч,
и W от расстроек по указанным составляющим. При этом зависимость сигналов и, и и от расстроек соответственно по емкостной и активной составляющим становится близкой к линейной, что существенно улучшает динамику системы и повышает ее быстродействие. Необходимо заметить, что устранение взаимной релейности характеристик каналов автокомпенсации емкостной и активной составляющих получено в предлагаемом устройстве без применения корректирующих сигналов и устройств для их формирования, сохранив в то же время прямоугольную форму сигналов 4, на выходах множительных звеньев 18 и 19, а это в конечном итоге и приводит к достижению
30 5
20
25
5 0 5
|цели изобретения.
Сказанное подтверждается временной диаграммой работы контура компенсации активной составляющей для устройства, изображенного на фиг. 1, построенной в предположении о точной настройке компенсации емкостной составляющей, а также о том, что фильтр 21 представляет собой инерционное звено.
Процесс автонастройки компенсации I активной составляющей на фиг. 3 начался со значительной недокомпенсации по активной составляющей, т.е. при относительно большой амплитуде напряжения смещения нейтрали (см. кривую 45), которой соответствует положение начала вектора Оз за пределами круга 44 (см, фиг. 2). Широтно-импульсная модуляция сигнала ) (кривая 49 на фиг. 3) на выходе модулятора 17 в данном случае практически отсутствует, сигнал V{t) по существу определяется выражением (5), сигнал 4,(t)(t) (кривая 50 на фиг, 3) совпадает по фазе с сигналом Jjt t) , В результате в сигналахifjit) (кривая 52) ии(1) (кривая 53) на выходах звена 19 и фильтра 21 присутствует положительная постоянная составляющая значительной величины, и исполнительный орган 6 компенсатора 3 активной составляющей увеличивает активную мощность, вводимую в КНПС (см, кривую 54 на фиг. 3). По мере уменьшения расстройки компенсации активной составляющей, уменьшается и амплитуда напряжения U(t) на поврежденной фазе (кривая 45), и увеличивается влияние
широтно-импульсной модуляции на сиг-, нацы , Y; () иУ.а) .. Начиная с моментаt можно считать, что начало вектора U находится в пределах круга 43 (фиг, 2) и действие широтно-импульсной модулядии становится существенным. Из диаграммы, изображенной на фиг, 3, видно, что с уменьшением амплитуды напряжения J,,(t) (кривая 45) уменьшаются вариации (с -частотой 50 Гц) коэффициента заполнения импульсов V,.,(t) (кривая 49) и, следовательно, уменьшается а мплитуда медленной составляющей v (-t) (кривая .51) указанного сигнала. При этом уменьшаются медленные составляющие сигналов У (t) и U,(t). (соответственно кривые 52 и 53), немотря на то, что сигналы Uj(t) и (i) (кривая 50) продолжают оставаться синфазными. В результате исполнительный орган 5 компенсатора 3 активной составляющей плавно подводит значение активной мощности , отдаваемой компенсатором КНПС (см. кривую 54 на фиг, 3) к требуемой величине, соответствующей точной настройке компенсации активной составляющей, что и обеспечивает асимптотическую устойчивость и улучшение динамических характеристик системы. Аналогичные рассуждения справедливы и для контура автонастройки компенсации емкостной составляющей (при точной настройке по активной составляющей тока ОЗНЗ). Рассмотрим работу широтно-импульсных модуляторов 16 и 17 в устройстве, изображенном на фиг . 1, на примере одного из них, а именно модулятора 17. Предполож -Ш5 что в данньй момент времени (например, t на фиг. 3) выходной сигнал релейного звена 27 с гистерезисом стал равен Н. Тогда., начиная с указанного момента, сигнал $(t) на выходе инерционного звена 29„ нарастает по экспоненте, начиная со значения (г и стремясь к величине кН (кривая 46 на фиг. 3), В момент времени t (фиг. 3) сигнал (t) достигнет величины, равной U, (график зависимости Uj(tKS представлен на фиг. 3 кривой 47). Сигнал (t) на входе репейного звена 27 с гистерезисом при этом проходит значение -S , выходной сигнал ) звена 27 изменяется скачком с величины Н до величины - Н (кривая 49
5
на фиг. 3). Вследствие этого, начиная с момента t , сигнал Ct) уменьшается по экспоненте, начиная со значения (t,) и стремясь к величине . -КН(кривая 46 на фиг. .3)..По достижении сигналом (t) величины, равной Jj-5 (на фиг. 3 график иjUhS представлен кривдой 48) , в момент времейи t сигнал(t) превысит значение , и выходной сигнал ) звена 27 снова изменится скачком с величины - Н до величины Н. Далее описанные процессы повторяются. Таким образом, при и, О коэффициент заполнения
S(Ui) импульсов V , (t) равен
-ii
и, 0 9(0,) 0,5, а -при
И
0,5, О
при
5(0,,) 0,5. Точная зависимость коэффициента SlUj) заполнения импульсов V Ct) определяется выражением (2). С уменьшением отношения /кН характер зависимости (2) на участке IU,, все более приближается к линейному. С другой стороны с уменьшением величины кН зависимость S(Lij) как следует из выражения (3), становится более крутой. Необходимость в применении двух раздельных модуляторов 16 и 17 обусловлена тем, что наилучшие динамические характеристики системы получаются при различных (для контуров автокомпенсации емкостной и активной составляющих) зависимостях S(Uj} и поэтому модуляторы 16 и 17 отличаются друг от друга значениями величин 8,к и Н .
В предлагаемом устройстве благодаря безынерционности обработки сигналов на промьшшенной частоте дости- гае тся улучшение динамики процессов автонастройки компенсации, повьше- ние быстродействия и, что наиболее важно, достигается работоспособность системы в режиме перемежающегося ду- тового замыкания, в том числе и пос(йж
ле погасания дуги, что означает расширение функциональных возможностей. Безынерционность устройства особенно существенна в случае применения в качестве компенсатора 3 активной составляющей безынерционного однофазного зависимого инвертора. Это связано с тем, что динамика подобной двухканальной системы существенно осложняется после прекращения дугового процесса в месте ОЗНЗ, т.е. в случае, когда целью системы является поддержание нулевого напряжения на фазе (в которой ранее наблюда
. n
лось ОЗНЗ) в условиях полной симметрии активных проводимостей между фазами сети и землей. Это осложнение обусловлено наличием двойного астатизма в контуре компенсации ем- костной составляющей. Подчеркнем, что двойной астатизм в рассматриваемом случае обусловлен,во-первых, астатическим характером привода 4 реактора 2,во-вторых,интегральной связью между частотой автоколебаний (поддерживаемых в КНПС управляемым однофазным зависимым инвертором 3), которая в свою очередь определяется индуктивностью реактора 2 и величи- ной Ч у напряжения U,{t) на поврежденной фазе. Двойной астатизм приводит к тому, что всякая дополнительная инерционность в контурах автонастройки компенсации или же усиление. взаимного влияния между контурами может явиться причиной автоколебаний в указанных контурах. Причем получение условий асимптотической устойчивости в системе, со- держащей (в качестве регулятора) известные устройства является проблемой, а техническая реализация устройства коррекции - весьма сложной.
В то же время предлагаемое устрой ство, как показывают результаты проведенных испытаний, а также исследований на ЭВМ, обеспечивают асимпто- тическую устойчивость системы автокомпенсации в рассматриваемом режи- ме, благодаря своей практической безынерционности.
Для более эффективной работы, предлагаемое устройство целесообразно комбинировать с известными устрой ствами для автонастройки компенсации в нормальном режиме раёоты сети.
В результате применения предлагаемого устройства в системе автокомпенсации токов ОЗНЗ удается создать высокоэффективную быстродействующую двухканальную систему автоматическог подавления дуговых замыканий, благодаря быстрой минимизации напряжения на дуговом промежутке на промышлен- ной частоте. Это в свою очередь позволяет эксплуатировать длительное время сети с ОЗНЗ даже в условиях угольных шахт и карьеров, обеспечивая таким образом уменьшение потерь от недоотпуска электроэнергии, от
411.2
развития ОЗНЗ в более тяжелые аварии и т.п.-Использование устройства существенно повышает надежность и безопасность электроснабжения.
Формула изобретения
1.Устройство для автоматического
регулирования токов компенсации в-ре- жимах однофазного замьжания на эем- лю, содержащее датчик напряжения смещения нейтрали, датчики фазовых и линейных напряжений сети, выходы ко-. торых поданы на входы блока выбора поврежденной фазы, первое и второе множительные звенья, а также первый и второй фильтры низких частот, причем выход первого множительного звена через первый фильтр низких частот подключен к входу исполнительного органа дугогасящего реактора, а выход второго множительного звена через второй фильтр низких частот соединен с входом исполнительного органа компенсатора активной составляющей, к первому входу первого множительного звена через первое релейное звено подключен выход линейных напряжений блока выбора поврежденной фазы, а к первому входу второго множительного звена через второе релейное звено подключен выход датчика напряжения смещения нейтрали, о т л и ч а ю- щ е е с я тем, что, с целью расширения функциональных возможностей и повьшения быстродействия, в него введены первый и второй широтно-им- пульсные модуляторы, входы которых подключены к выходу фазных напряжений блока выбора поврежденной фазы, а выходы - к вторым входам соответственно первого и второго множительных звеньев.
2.Устройство по п. 1, о т л и- чающсеся тем, что каясдый широтно-импульсный модулятор содержит последовательно включенные элемент вычитания, релейное звено с гистерезисом и инерционное звено, причем первый вход элемента вычитания и выход релейного звена с гистерезисом являются соответственно входом и выходом широтно-импульсного модулятора, а выход инерционного звена соединен с вторым входом элемента вычитания.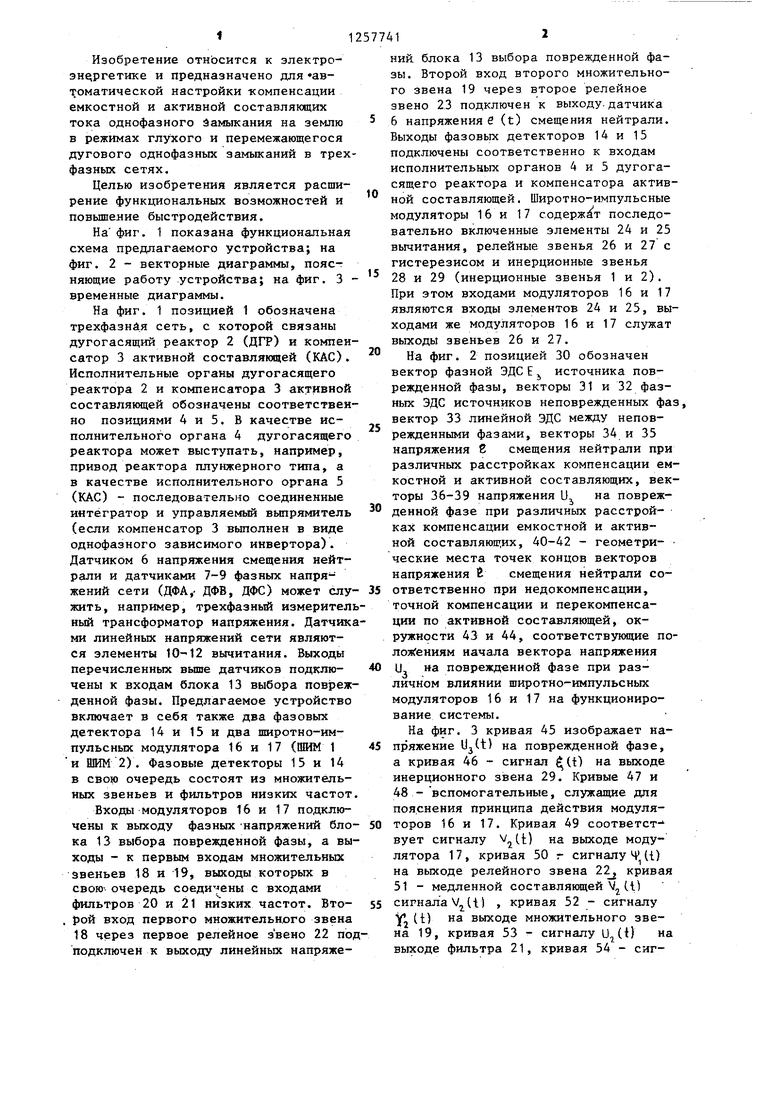
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНАСТРОЙКИ КОМПЕНСАЦИИ ЕМКОСТНОЙ И АКТИВНОЙ СОСТАВЛЯЮЩИХ ПРИ ДУГОВЫХ ЗАМЫКАНИЯХ НА ЗЕМЛЮ | 1994 |
|
RU2074473C1 |
| Способ распознавания поврежденной фазы в сетях с компенсацией токов однофазного замыкания | 1990 |
|
SU1781644A1 |
| Измеритель и всережимный автокомпенсатор токов однофазных замыканий в воздушных,кабельных и смешанных сетях | 1987 |
|
SU1443079A1 |
| СПОСОБ ПОДАВЛЕНИЯ ДУГОВЫХ ЗАМЫКАНИЙ НА ЗЕМЛЕ В ОБМОТКАХ НАГРУЗКИ И ПИТАЮЩИХ ТРАНСФОРМАТОРОВ ТРЕХФАЗНОЙ СЕТИ С НЕЗАЗЕМЛЕННОЙ НЕЙТРАЛЬЮ (ВАРИАНТЫ) | 1994 |
|
RU2072604C1 |
| Способ компенсации токов однофазного замыкания в трехфазной сети с дугогасящим реактором в нейтрали | 1984 |
|
SU1264263A1 |
| Устройство для автоматической настройки компенсации емкостных токов в электрических сетях | 1984 |
|
SU1257745A1 |
| Устройство для компенсации полного тока однофазного замыкания в коротких сетях | 1990 |
|
SU1777199A1 |
| Способ распознавания поврежденной фазы в сети с изолированной нейтралью или с компенсацией токов однофазных замыканий на землю | 1990 |
|
SU1777102A1 |
| Поисковый регулятор для резонансной настройки контура нулевой последовательности сети | 1982 |
|
SU1080231A1 |
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием | 1978 |
|
SU771795A1 |
Изобретение относится к области электротехники и может быть использовано для автоматической настройки компенсации емкостной и активной составляющих тока однофазного замьжания на землю (ОЗНЗ) в режимах глухого и перемежающегося дугового однофазных замыканий в трехфазных сетях.. Цель изобретения -. расширение функциональных возможностей и повышение быстродействия. При возникновении в сети ОЗНЗ блок 13 выбора поврежденной фазы распознает указанный режим и поврежденную фазу, а также к входам широтно-им- пульсных модуляторов (ШИМ) 16 и 17 подключает выходы датчиков 7 и 8 или 9 напряжения поврежденной фазы, а к входу релейного звена 22 подключает выходы датчиков 10, 11 или 12 линейного напряжения между неповрежденными фазами. На выходах ШИМ 16 и 17 формируется двухуровневьй сигнал прямоугольной формы с частотой, значительно превышающей частоту сети, который подается на входы фазовых детекторов 14 и 15 и позволяет устранить взаимную релейность характеристик контуров автокомпенсации емкостной и активной составляющей. Благодаря безынерционности обработки сигналов на промышленной частоте достигаются улучшение динамики процессов автонастройки компенсации, повышение быстродействия и достигается работоспособность системы в режиме перемежающегося дугового замыкания, в том числе и после погасания дуги. Безынерционность системы особенно существенна в случае применения в качестве компенсатора 3 активной составляющей безынерционного однофазного зависимого инвертора, t з.п. ф-лы, 3 ил. (Л to ел sl 4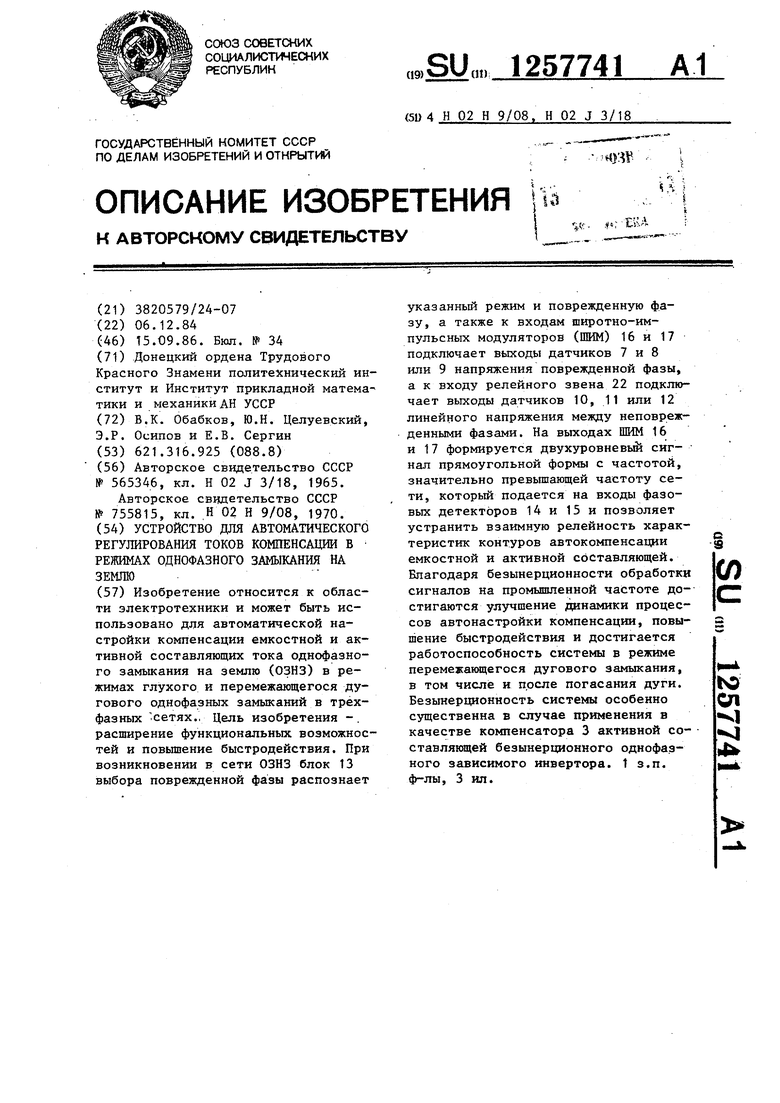
/7e effOff/reffccffff/ji /TO afffmfS ff cac/rrcfS/rfffau/eu
/7f effaf4ne/ ccfi/f/j
fAfffOCflV fK/
«4
-«2
/TO CffCfTTCfS/f MfUfse/
фие2
J,
U8. 3
Редактор Ю. Середа
Составитель О. Наказная
Техред Л.Олейник Корректор М. Демчик
Заказ 5033/52 Тираж 612 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Способ автоматической компенсации активной составляющей тока замыкания на землю | 1973 |
|
SU565346A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 755815, кл | |||
| ,Н 02 Н 9/08, 1970. | |||
