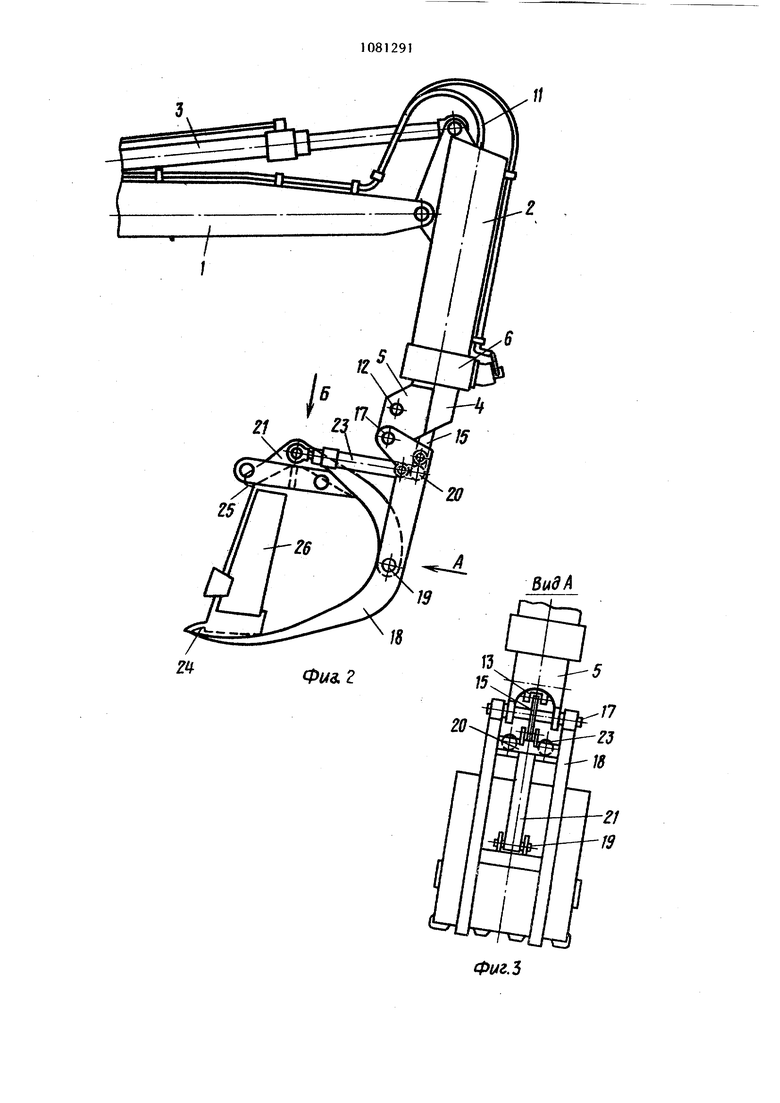
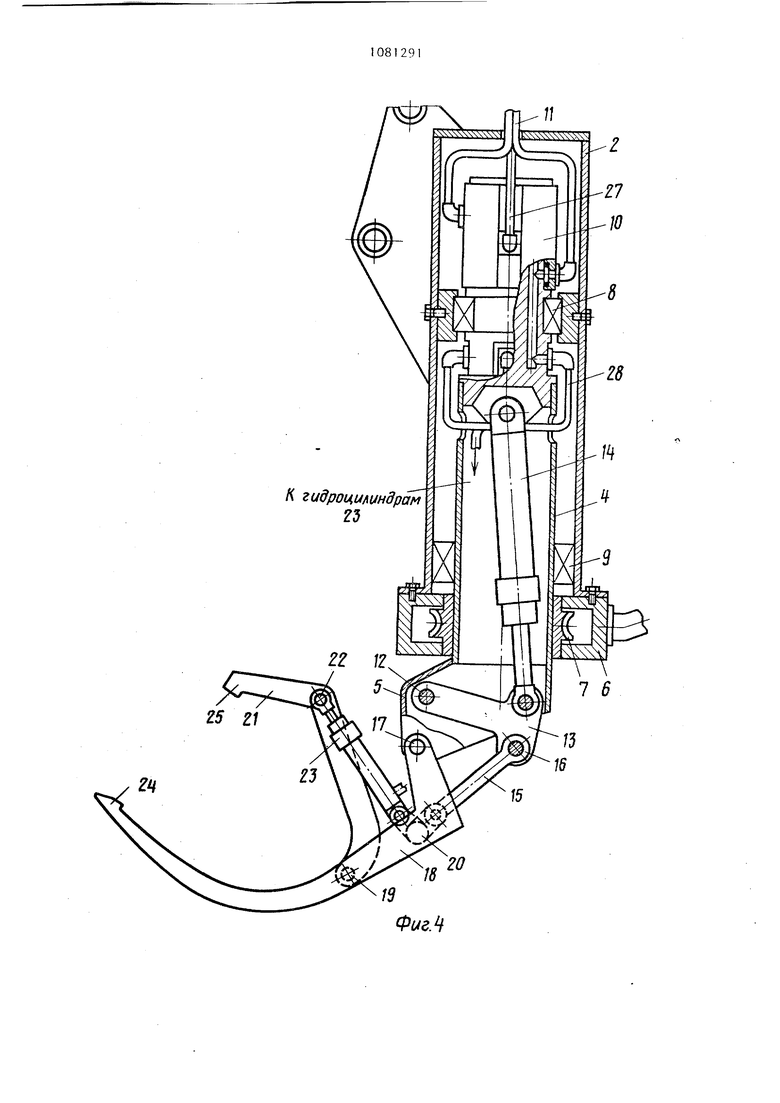
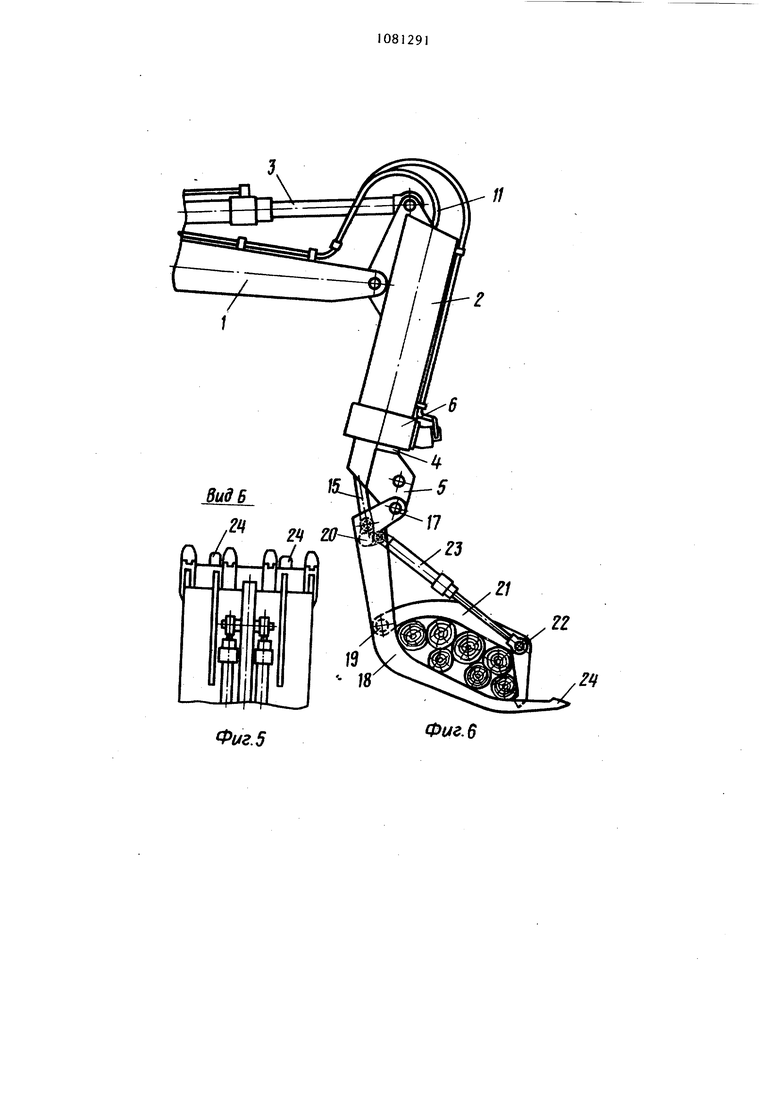
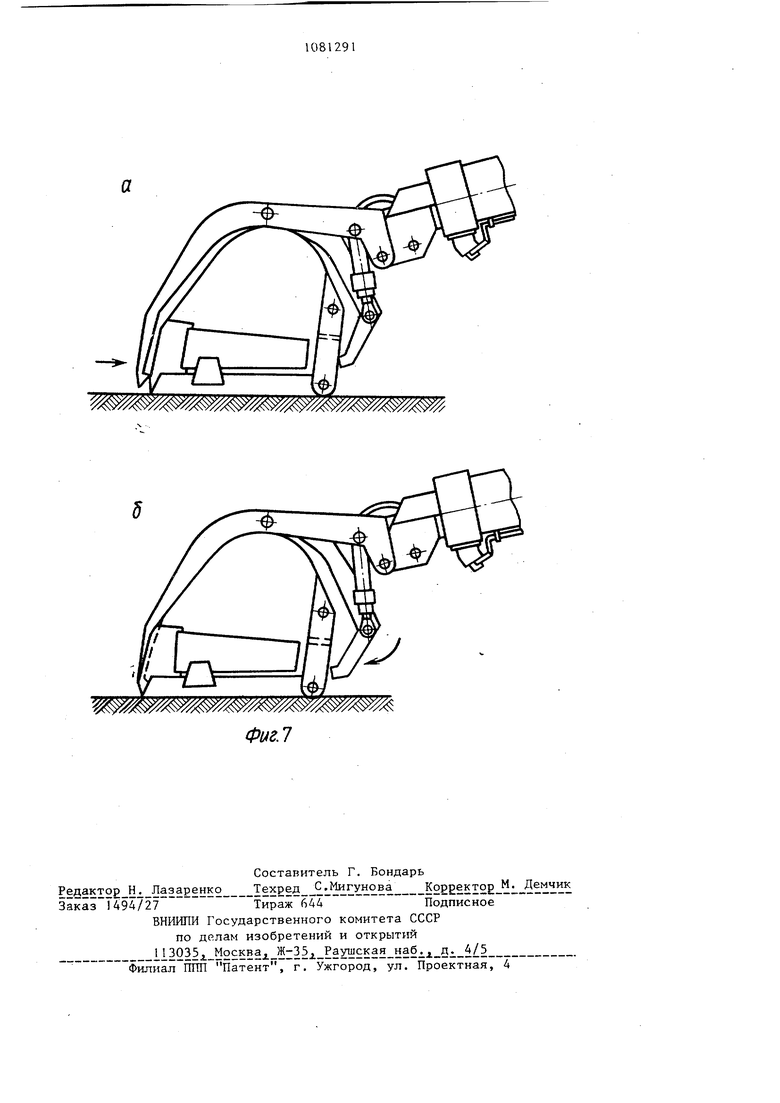
I1 Изобретение относится к эемлерон ньм мапгинам многоцелевого назначе™ ния, в частности одноковшовым гилравлическим экскаваторам, оснащенш,& механизмом замены рабочих органов; и предназначено для поньштения эЛфек тивности использования экскаваторно го оборудования. Известно рабочее оборудование гидравлическогЪ экскаватора,, предназначенное для выполнения нескольких видов работ, включающее рукоять гндроуправляемый поворотный ковш, снабженный челюстным захватомj рычаги и гидроцилиндры управления. Данны экскаватор может взламывать элементы дорожного покрытия, производить земляные работь., захватьтвать и вать единичные грузь (как(ни и т. п.) С1 Д. Недостатком известного оборудования является невоэможность расширени номенклатуры смеиньс : видов рабочего оборудования, навспгенньпс на данный экскаватор. В то же время,, широкий спектр работ требует использования большого количества узкоспециальных видов рабочих органов. Конструкция известного устройства не позволяет быстро и эффективно в зависимости от специфических усло вий эксплуатации и втедов работ, ocj ществить замену одного рабочего органа на другой (узкий ковш, отвал, профильные и дренажные ковши, рыхли тели и т.д,) Отсоедршение одного ковша и навешивание другого ви;},а требует значительного времени и руч ного труда5 либо совсем невозможно, Это существенно смокает области рационального использования экскавато ров . Наиболее близкиь: к изобрптешяо по технической сущности и достигаемому результату является рабочее об рудование гидравлического экскавато ра, включающее рукоять, рабочий орган, поворотный вокруг оси рзкояти И шарнирно соединенный тягой и гом с гидроцилиндром управления. Оснащение рабочего оборудования экскаватора механизмом для быстрой замены рабочих органов позволяет на вешивать различные виды сменных ра бочих органов (ковш, отвал, рыхлитель, захваты и т.п.). Различные ви ды рабочих органов являются съемными, могут устанавливаться на и фиксироваться на ней C2J, 1 Однако недостатком конструкции является то, что каждый рабочий орган выполняет строго определенный вид работы, не может быть использован иа других работах без вмешательства человека, а его замена требует обязательного использования ручного труда при съеме старого, установке и фиксации нового рабочего органа, не пдзволяет быстро перейти от разработки грунтов к погрузкеразгрузке единичных грузов или рыхлению грунта. Данная конструкция требует обязательного отсоединения одного рабочего органа и установки и подсоединения другого, что не всегда удобно, например, при работе 13 стесненных городских условиях. К тому же возить на себе минимум оборудования для проведения комплекса работ 3 городском строительстве не представляется возможньм. Выполнение Г; городских условиях разнотипных операций, небольших по объему, таких как разрушение полотна, разработка и выемка грунта, требзет целого комплекса машин. Частая переброска этих машин сопрялсена с определенными трудностями, и. учитьгоая незначительность этих обьемов, работы часто проводятся вручную. Поэтому, несмотря на достаточную простоту конструкции, она требует значительных затрат времени, использования ручного труда, что в конечном счете сказьшается на общей производительности работ. Целью изобретения является расширение технологических возможностей р-тбочего оборудования при выполнении комплекса различных операций. Псставленная цель достигается тем, чго в рабочем оборудовании гидравлического экскаватора, включающем рукоять, рабочий орган, поворотный вокруг оси рукояти и шарнирно соедиггенный тягой и рычагом с гидроцилинд- ром управления, рабочий орган выполнен в виде трехзубого рыхлителя-захвата, два зуба которого установлены на рукояти, кинематически связаны с гидроцилиндром управления и жестко соединены между собой при помощи двух промелгуточных осей, а третий установлен на одной из промежуточных осей и снабжен шарнирно установленными на нем одними концами дополнительными гидроцилиндрами, другие концы которых установлены на другой промежуточной оси. 31 Кроме того, каждый зуб рыхлителязахвата выполнен с упором для установки между ними ковша, а внутренняя поверхность каждого зуба идентична внешнему контуру ковша, причем каждый упор выполнен в виде режущего зуба ковша. На фиг. 1 показано рабочее оборудование гидравлического экскаватора с закрепленным на трехзубом захвате ковшом, общий вид; на фиг. 2 - то же повернуто относительно оси рукояти на на фиг. 3 - вид А на фиг. 2; на фиг. 4 - рабочее оборудование, разрез вдоль оси рукояти, общий вид; на фиг. 5 - вид Б на фиг. 2 (повернуто); на фиг. 6 - устройство при захвате грузов; на фиг. 7 - схемы захвата ковша. Рабочее оборудование гидравлического экскаватора состоит из стрелы I, рукояти 2, шарнирно прикрепленной к стреле 1 и управляемой посредством гидроцилйндра 3. Рукоять 2 снабжена внутренней поворотной колонкой 4, на конце которой жестко установлен полый оголовок 5 с рабочим органом, выполненным в виде трехзубого гидроуправляемого рыхлителя-захвата. Вращение внутренней поворотной колонки осуществляется от гидромотора 6 посредством червячного редуктора, червячное колесо 7 которого жестко закреплено на поворотной колонке 4. Последняя установлена в подшипниках 8 и 9, а на торцевой своей части оборудована гидрав лическим коллектором 10, жестко на ней закрепленньм. Входная магистраль коллектора 10 соединена с трубопроводом 11. Внутри оголовка 5 шарнирно закреплен посредством шарнира 12 Т-образный рычаг 13, один конец которого соединен с гидроцилиндром 14 управления, свободно установленным внутри колонки 4, а другой - с тягой 15 посредством цилиндрического шарнира 16. Через оголовок 5 проходит вал 17, на концах которого симметрич но относительно оси рукояти расположены боковые зубья 18 трехзубого гид роуправляемого рыхлителя-захвата. Для придания конструкции жесткости боковые зубья 18 жестко соединены между собой двумя промежуточными ося ми 19 и 20. В центре промежуточной оси 19 свободно установлен третий гидроуправляемый зуб 21, шарнирно 14 соединенный цилиндрическим пальцем 22с концами дополнительных гидроцилиндров 23. Другие концы гидроцилиндров 23 свободно установлены на промежуточной оси 20. К этой же оси 20 шарнирно прикреплен конец тяги 15. Зубья 18 и 21 снабжены упорами 24 и 25 соответственно, что обеспечивает надежное крепление в них ковша 26. Причем внутренняя поверхность каждого зуба идентична внешнему контуру ковша для обеспечения более плотного его захвата и контакта по всей поверхности зубьев 18 и 21. Упоры 24 и 25 при захвате трехзубым рыхлителем-захватом ковша 26 располагаются между зубьями ковша 26, выполнены в виде этих режущих зубьев и несколько меньше их. Рабочая жидкость к гидроцилиндрам 14 и 23 подается через коллектор 10 по трубопроводам 27 и 28 соответственно. Принцип работы устройства и его преимущества целесообразно оценить, рассмотрев комплекс работ, в котором участвует экскаватор. В начальной стадии происходит сбор крупных длинномерных грузов (бревен/ или негабаритных камней и булыжников (фиг. 6), уборка которых со строительной площадки всегда сопряжена с определенными трудностями. При этом зубья 18 подходят к штабелю груза или к одиночным материалам и подцепляют их снизу. Под действием выдвигающегося штока дополнительного гидроцилиндра 23происходит поворот зуба 21 вокруг промежуточной оси j 9. Этим обеспечивается зажим груза между зубьями 18 и 21. В дальнейшем груз поднимается рукоятью либо поворотом всего захвата под действием гидроцилиндра 14. Точность выгрузки материала, как и точность подвода рабочего органа к штабелю при захвате груза, обеспечивается работой гидроцилиндров 13 и 14 или поворотом всего захвата, закрепленного на оголовке 5, вместе с поворотной колонкой 4 под действием гидромотора 6. При необходимости предварительного разрыхления грунта перед его экскавацией устройство может работать как рыхлитель. Для этого поворотная колонка 4 поворачивается в н;.ткном направлении, а рыхление грунта производится зубьями 18, либо поворотом рыхлителя-захвата относительно оголовка 5 вокруг вала 17 под действием гидроцилиндра 14 управления, : тяги 15 и рычага 13, либо поворотом всей рукояти 2 под действием гидроцилиндра 3. Наличием упоров 24, выполненных в виде режущих зубьев, позволяет эффективно внедряться зубьям 18 в rpjTHT и его раз абатьшать. При необходимости экскавации грун та и погрузки его в транспортное средство все рабочее оборудование поворачивается к ковшу, предварительно положенному недалеко, от стоян ки экскаватора режзтцей кромкой вниз (фиг. 7). При подходе захвата к ковшу 26 шток дополнительного гидроцилиндра 23 полностью втянут, что обеспечивает наибольшее относительное раскрытие зубьев 18 и 21. Реализуя поло жение захвата в пространстве поворотом колонки 4 и вьщвижением штока идроцшшндра управления 14, рыхлитель-захват устанавливается над ковшом . Опусканием всего рабочего оборудования (стрелы 1, рукояти 2) зубья 18 накрывают ковш 26 с тыльной стороны таким образом, что их упоры 24 входят в пространство между режзпцими зубьями ковша 26 и зацепляются за ег режущз ю кцомку. При этом 24 зубьев 18 выполнены чуть меньше основных зубьев ковша 26, чем достигается их свободное прохождение основных зубьев 26 между опорной поверхностью, на которую положен ковш, и режущей кромкой ковша, находящейся между режущими зубьями. После того, как упоры 24 зацепились за ковш, про изводится вьщвизкение штоков гидроцилиндров 23, выбирая зазор между зубом 21 и тыльной поверхностью ковша 26. Происходит поворот зуба 21 вокру оси 19, а упор 25 заходит за верхнюю кромку ковша 26 и оказывается ниже нее. После того, как упор 25 оказался ниже верхней кромки ковша 26, што гидроцилиндра 23 начинает втягиваться, подтягивая упор 25 к верхнейх кромке ковша. При этом ковш своей задней стенкой прижимается к внутренней поверхности зубьев 21 и 18, а его нижняя кромка упирается в упоры 24. Шток гидроцилиндра 23 подтягивается до тех пор, пока ковш 26 плотно не прижмется к внутренней поверхности зубьев 18 и 21 и надежно не зафиксируется между ней и упорами 24 и 25. После этого устройство готово для вьшолнения работ по экскавации грунта. Наличие црворотной колонки 4, расположенной внутри рукояти 2, позволяет осуществлять копание грунта в любой плоскости. При работе поворотном ковша происходит выдвижение штока гидроцилиндра 14, при этом поворачивается рычаг 13 вокруг оси 12 и толкает тягу 15, которая через ось 20 воздействует на ковш и на весь рыхлитель-захват в целом. Зубья 18 и 21 благодаря своей форме и наличию упоров 24 и 25 плотно прилегают к внешнему контуру ковша и обеспечивают хорошую внедряемость его в грунт. Отсоединение ковша осуществляется в обратном порядке. Если надобность в захватном или рыхлительном устройстве отпадает, а работы длительное время проводятся только ковшом, то весь трехзубый захват легко отсоединяется простым выбиванием пальцев 17 и 16, а вместо него устанавливается стационарный ковш или другое оборудование. Преимущество изобретения заключается в том, что исключается одна из непр.оизводительньк операций съем одного и установка другого рабочего органа при переходе от одного вида работ к другому. Использование рабочего оборудования позволяет существенно повысить эффективность применения экскаватора в строительстве при выполнении комплекса различных работ. Отпадает необходимость в перевозке большой номенклатуры сменных рабочих органов, снижается доля времени на монтаж-демонтаж, уменьшается необходимость использования ручного труда, а следовательно, повьшается производительность труда за счет уменьшения вынужденных простоев машины при замене рабочих органов.
Фиг.
Фиг. 5
//
Фиг. в
а
щ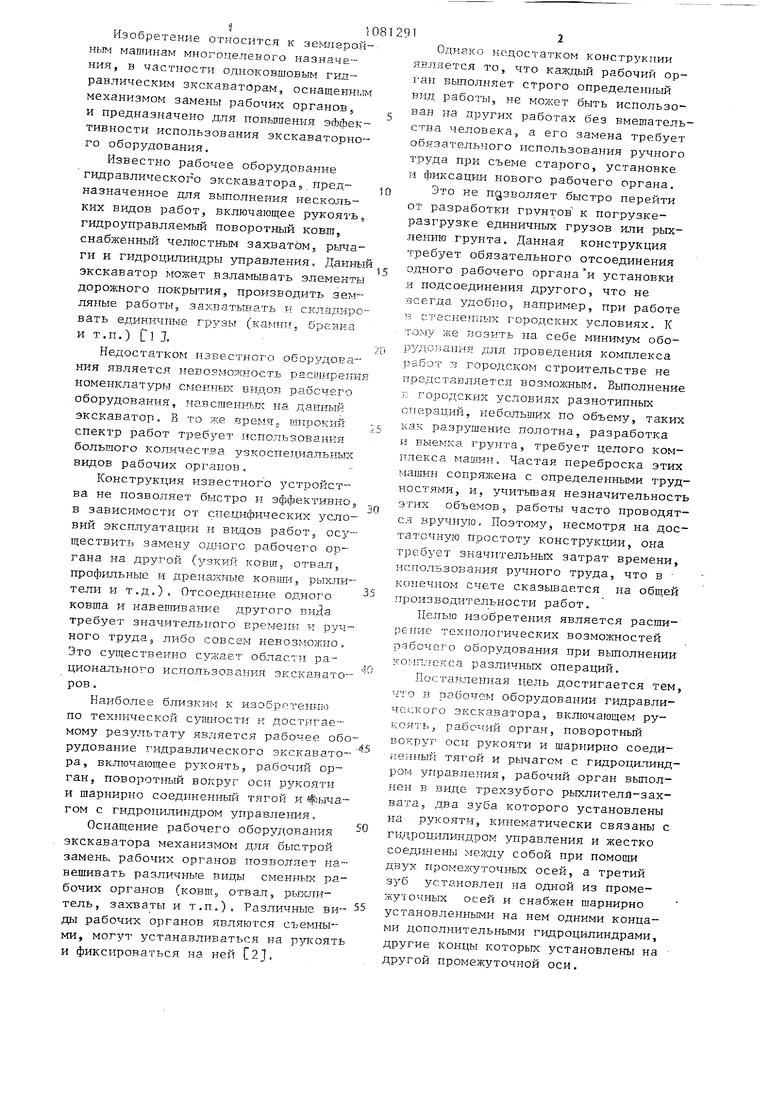
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА | 1999 |
|
RU2164985C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2014 |
|
RU2581181C1 |
| Рабочее оборудование одноковшового экскаватора | 1983 |
|
SU1087623A1 |
| Самоходный гидравлический экскаватор | 1984 |
|
SU1313956A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 1997 |
|
RU2122073C1 |
| ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 1999 |
|
RU2163952C1 |
| СПОСОБ ЭКСКАВАЦИИ ГРУНТА ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032029C1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР (ВАРИАНТЫ) | 2002 |
|
RU2211290C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА | 2008 |
|
RU2373335C1 |
| Рабочее оборудование гидравлического экскаватора | 1990 |
|
SU1738928A1 |
I. РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА, включающее рукоять, рабочий орган, поворотный вокруг оси рукояти и шарнирно соединенный тягой и рычагом с гидроцилиндром управления, отличающееся тем, что, с целью расширения технологических возможностей рабочего оборудования при выполнении комплекса различных операций, рабочий орган выполнен в виде трехзубого рыхлителя-захвата, два зуба которого установлены на рукояти, кинематически связаны с гидроцилиндром управления и жестко соединены меу-ду собой при помопщ двух промежуточных осей, а третий зуб установлен на одной из промежуточных осей и снабжен шарнирно установленными на нем одними концами дополнительными гидроцилиндрами, другие концы которых установлены на другой промежуточной оси. S 2. Оборудование по п. Г, отличающееся тем, что каждый (Л зуб рыхлителя-захвата выполнен с упором для установки между ними ковша, а внутренняя поверхность каждого зуба идентичг1а внешнему контуру ковша, причем каждый упор выполнен в виде режущего зуба ковша.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рабочее оборудование гидравлического экскаватора | 1977 |
|
SU624993A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Телескопический планировщик UDS llOa.Проспект фирмы Стройэкспорт, ЧССР (прототип) | |||
