Изобретение относится к самоходным полноповоротным гидравлическим экскаваторам с двумя рабочими оборудованиями.
Цель изобретения - расширение технологических возможностей за счет увеличения угла поворота рабочего органа и повышения устойчивости экскаватора.
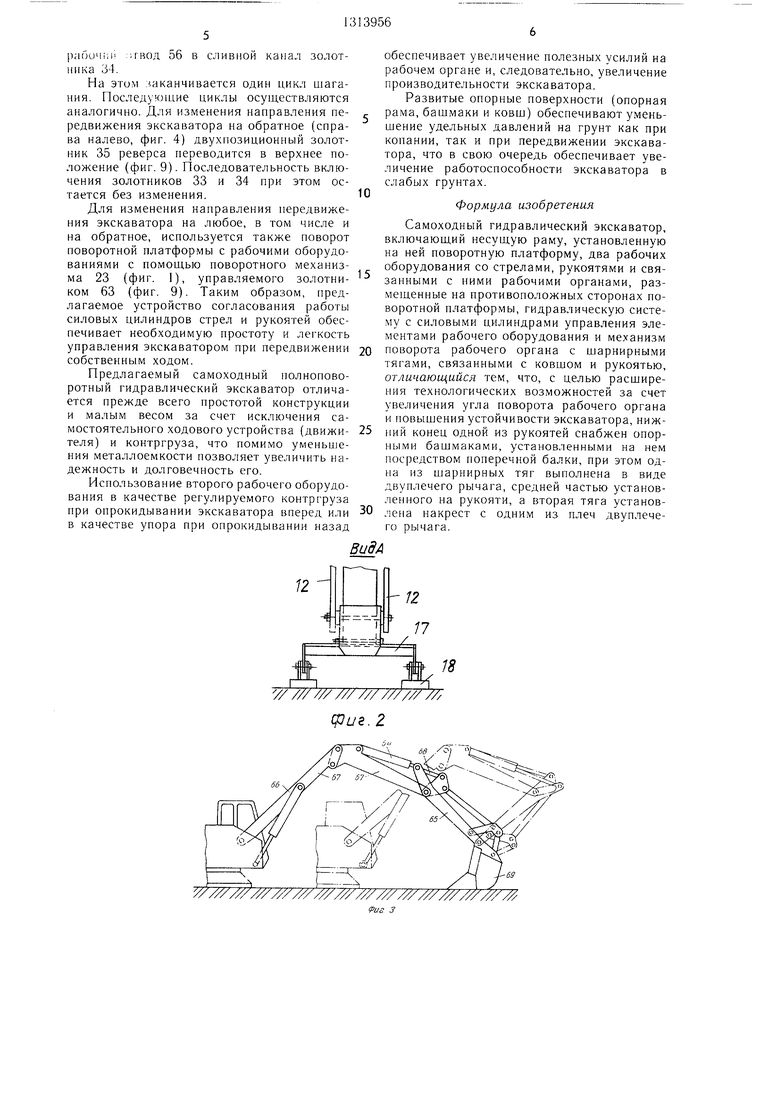
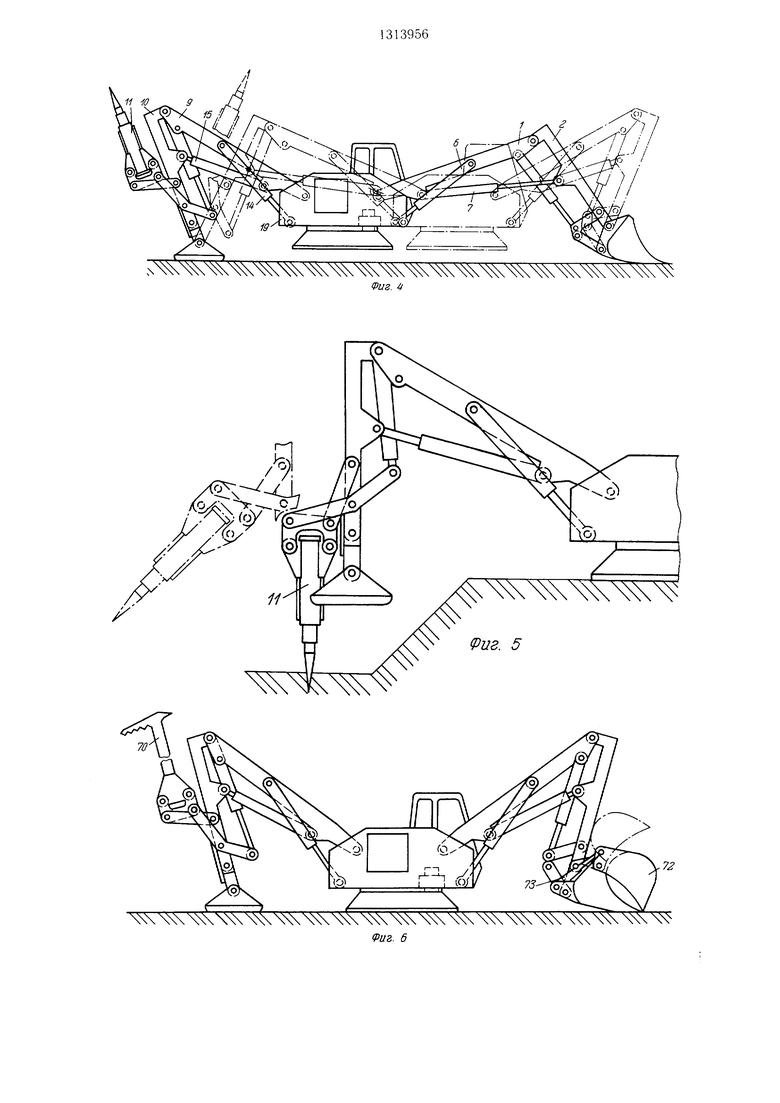
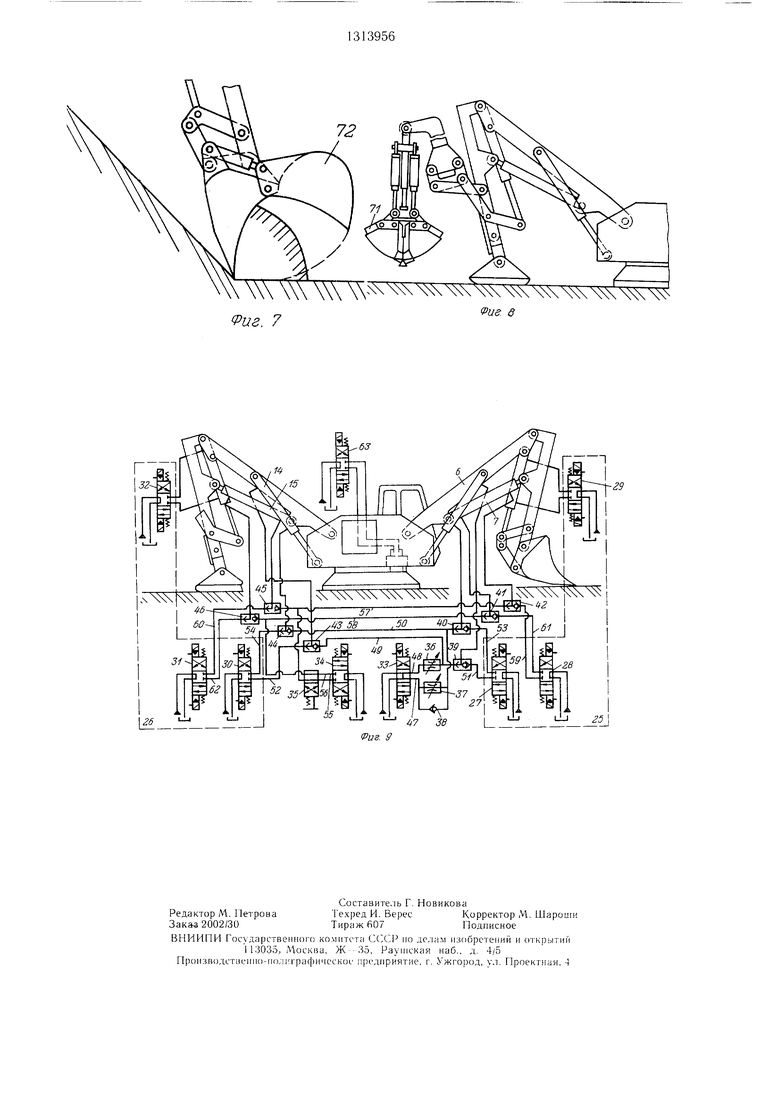
На фиг. 1 изображен самоходный гид- рав;1ический экскаватор, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - экскаватор с разновидностью основного рабочего оборудования - обратная лопата; на фиг. 4 - экскаватор при передвижении своим ходом, один из рабочих органов в транспортном положении; на фиг. 5 - рабочий орган в рабочем положении; на фиг. 6 - экскаватор с разновидностью вспомогательного рабочего органа - рыхлителем-зацепом и дополнительной створкой ковша; на фиг. 7 - ковш с дополнительной створкой при копании; на фиг. 8 - экскаватор с разновидностью вспомогательного рабочего органа - грейфером; на фиг. 9 - схема гидроуправления экскаватора.
Самоходный полноповоротный гидравлический экскаватор (фиг. 1) включает два рабочих оборудования, расположенных по обе стороны от оси вращения поворотной платформы.
Справа на фиг. 1 расположено основное рабочее оборудование (прямого копания), содержащее стрелу 1, рукоять 2, рабочий орган - ковщ 3, рычаг 4 поворота ковша и тягу 5, а также гидроцилиндры Ч)ворога стрелы 6, поворота рукояти 7 и поворота ковша 8.
Слева расположено вспомогательное рабочее оборудование, содержащее стрелу 9, рукоять 10, рабочий орган - рыхлитель с гидроприводом (гидромолот) 11, двуплечий рычаг 12 поворота рыхлителя и шарнирную тягу 13, а также гидроцилиндры поворота стрелы 14, поворота рукояти 15 и поворота рыхлителя 16. Кроме того, на нижнем конце рукояти 10 с помощью поперечной балки 17 шарнирно смонтированы опорные ба1п- маки 18.
Рабочий орган вспомогательного рабочего оборудования смонтирован на рукояти с помощью двуплечего рычага 12 и расположенной накрест с одним из плеч рычага 12 П1арнирной тяги 13 (фиг. 1), шар- пирно укрепленных с одной стороны на рукояти 10, а с другой стороны свободными концам-j шарнирно присоединенных к рабочему органу. Двуплечий рычаг 12 с шарнирной тягой 13 образует механизм поворота рабочего органа, приводимый силовым гидроцилиндром 16. Такое исполнение механизма поворота обеснечивает увеличение угла поворота рабочего органа относительно рукояти.
Нижние концы стрел 1 и 9 и гидроцилиндров 6 и 14 шарнирно укреплены па поворотной платформе 19, укрепленной пос
редством опорно-поворотного приспособления 20 на опорной раме 21, опирающейся нижней своей поверхностью на грунт. На поворотной платформе смонтированы также кабина 22 машиниста с пультом гидроуправления, поворотный механизм 23 и силовая установка 24.
Для управления рабочими оборудованиями при копании предусмотрены два трех- золотниковых распределителя (внутри пунктирных контуров 25 и 26 на фиг. 9): золотники 27, 28 и 29 управления гидроцилиндрами - соответственно стрелы, рукояти и ковша основного рабочего оборудования, а золотники 30, 31 и 32 - цилиндрами стрелы, рукояти и рыхлителя вспомогательного рабочего оборудования. Рабочие отводы указанных золотников соединены гидролиниями с разноименными полостями соответствующих гидроцилиндров.
0
Для согласования управления обоими рабочими оборудованиями при передвижении экскаватора в гидроуправлении предусмотрено устройство (фиг. 9), содержащее два трех- позиционных золотника 33 и 34, двухпозиг ционный золотник 35 реверса хода, два дросселя 36 и 37 с обратным клапаном 38. С помощью клапанов 39-46 с логической функцией ИЛИ золотники 33 и 34 присоединены параллельно к гидромагистралям управления основных золотников 27, 28 и 30, 31 (циQ линдрами стрел и рукоятей) при копании. Рабочие отводы 47 и 48 золотника 33 согласующего устройства через дроссели 36 и 37 присоединены к гидролиниям 49 и 50, соединяющим между собой с помощью клапанов ИЛИ 39, 43 и 40, 44 на их кон5 liax одноименные полости гидроцилиндров 6 и 14 (стрел 1 и 9 на фиг. 1). Противоположные подводы клапанов 39 и 43 соединены соответственно с рабочими отводами 51 и 52 основных золотников 27 и 30 управления указанными гидроцилиндрами 6
0 и 14 стрел, а противоположные подводы клапанов 40 и 44 - с рабочими отводами 53 и 54 этих же золотников (27 и 30).
Рабочие отводы 55 и 56 золотника 34 ,г согласующего устройства через двухпози- ционный золотник 35 реверса хода присоединены соответственно к гидролиниям 57 и 58 (или 58 и 57 при переключении золотника 35), соединяющим между собой с помощью клапанов ИЛИ 42, 45 и 41, 46 на Q их концах разноименные полости гидроцилиндров 7 и 15 рукоятей 2 и 10 (фиг. 1). Противоположные подводы клапанов 42 и 45 соединены соответственно с рабочи.ми отводами 59 и 60 основных золотников 28 и 31 управления указанными гидроцилиндрами 7 5 и 15 рукоятей, а противоположные подводы клапанов 41 и 46 - с рабочими отводами 61 и 62 этих же золотников (28 и 31).
Трехпозиционный золотник 63 предназначен для управления гидромотором вращения поворотной платформы 19 экскаватора (фиг. 1).
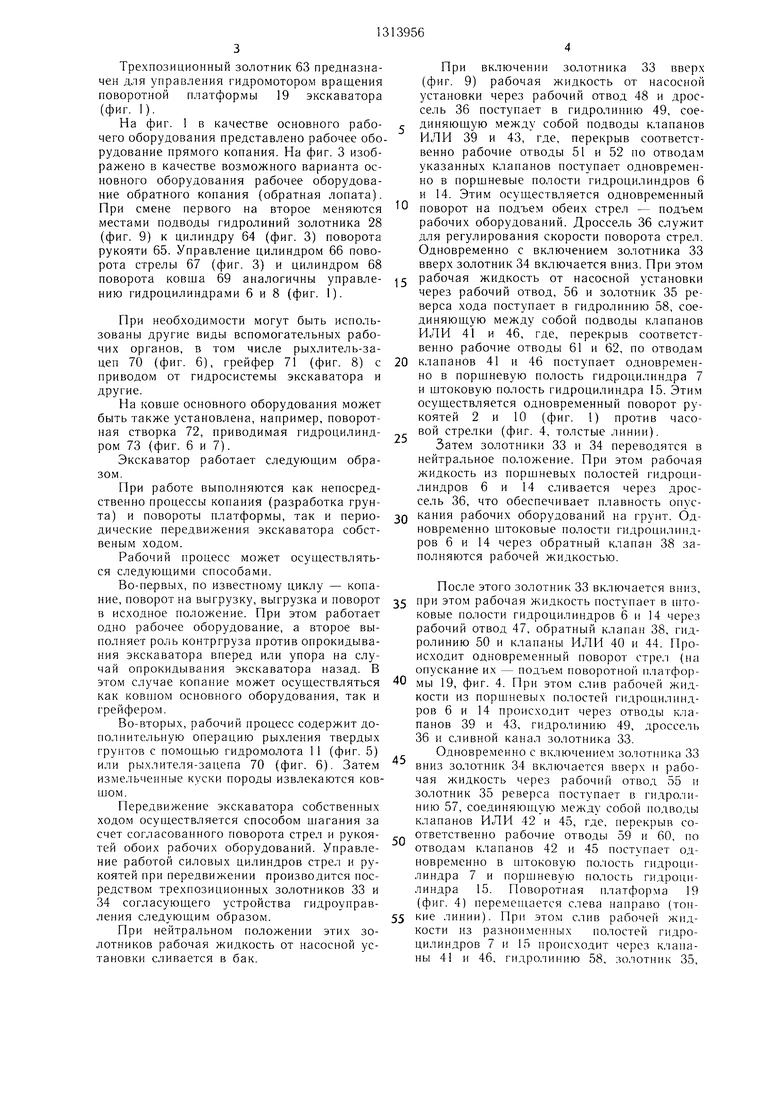
На фиг. 1 в качестве основного рабочего оборудования представлено рабочее оборудование прямого копания. На фиг. 3 изображено в качестве возможного варианта основного оборудования рабочее оборудование обратного копания (обратная лопата). При смене первого на второе меняются местами подводы гидролиний золотника 28 (фиг. 9) к цилиндру 64 (фиг. 3) поворота рукояти 65. Управление цилиндром 66 поворота стрелы 67 (фиг. 3) и цилиндром 68 поворота ковша 69 аналогичны управлению гидроцилиндрами 6 и 8 (фиг. 1).
При необходимости могут быть использованы другие виды вспомогательных рабочих органов, в том числе рыхлитель-зацеп 70 (фиг. 6), грейфер 71 (фиг. 8) с приводом от гидросистемы экскаватора и другие.
На ковше основного оборудования может быть также установлена, например, поворотная створка 72, приводимая гидроцилиндром 73 (фиг. 6 и 7).
Экскаватор работает следующим образом.
При работе выполняются как непосредственно процессы копания (разработка грунта) и повороты платформы, так и периодические передвижения экскаватора собст- веным ходом.
Рабочий процесс может осуществляться следующими способами.
Во-первых, по известному циклу - копание, поворот на выгрузку, выгрузка и поворот в исходное положение. При этом работает одно рабочее оборудование, а второе выполняет роль контргруза против опрокидывания экскаватора вперед или упора на случай опрокидывания экскаватора назад. В этом случае копание может осуществляться как КОВН1ОМ основного оборудования, так и г рейфером.
Во-вторых, рабочий процесс содержит дополнительную операцию рыхления твердых грунтов с помощью гидромолота 11 (фиг. 5) или рыхлителя-зацепа 70 (фиг. 6). Затем измельченные куски породы извлекаются ков- щом.
Передвижение экскаватора собственных ходом осуп1.ествляется способом щагания за счет согласованного поворота стрел и рукоятей обоих рабочих оборудований. Управление работой силовых цилиндров стрел и рукоятей при передвижении производится посредством трехпозиционных золотников 33 и 34 согласующего устройства гидроуправления следующим образом.
При нейтральном положении этих золотников рабочая жидкость от насосной установки сливается в бак.
5
При включении золотника 33 вверх (фиг. 9) рабочая жидкость от насосной установки через рабочий отвод 48 и дроссель 36 поступает в гидролинию 49, сое- диняющую между собой подводы клапанов ИЛИ 39 и 43, где, перекрыв соответственно рабочие отводы 51 и 52 по отводам указанных клапанов поступает одновременно в поршневые полости гидроцилиндров 6 и 14. Этим осуществляется одновременный
поворот на подъем обеих стрел - подъем рабочих оборудований. Дроссель 36 служит для регулирования скорости поворота стрел. Одновременно с включением золотника 33 вверх золотник 34 включается вниз. При этом
с рабочая жидкость от насосной установки через рабочий отвод, 56 и золотник 35 реверса хода поступает в гидролинию 58, соединяющую между собой подводы клапанов ИЛИ 41 и 46, где, перекрыв соответственно рабочие отводы 61 и 62, по отводам
0 клапанов 41 и 46 поступает одновременно в порщневую полость гидроцилиндра 7 и штоковую полость гидроцилиндра 15. Этим осуществляется одновременный поворот рукоятей 2 и 10 (фиг. 1) против часовой стрелки (фиг. 4, толстые линии).
Затем золотники 33 и 34 переводятся в нейтральное положение. При этом рабочая жидкость из поршневых полостей гидроцилиндров 6 и 14 сливается через дроссель 36, что обеспечивает плавность опус0 кания рабочих оборудований на грунт. Одновременно штоковые полости гидроцилипд- ров 6 и 14 через обратный клапан 38 заполняются рабочей жидкостью.
После этого золотник 33 включается вниз, 5 при этом рабочая жидкость поступает в niTO- ковые полости гидроцилиндров 6 и 14 через рабочий отвод 47, обратный клапан 38, гидролинию 50 и клапаны ИЛИ 40 и 44. Происходит одновременный поворот стрел (на опускание их - подъем поворотной платфор- 0 мы 19, фиг. 4. При этом слив рабочей жидкости из поршневых полостей гидроцилиндров 6 и 14 происходит через отводы клапанов 39 и 43, гидролинию 49, дроссель 36 и сливной канал золотника 33.
Одновременно с включением золотника 33 вниз золотник 34 включается вверх и рабочая жидкость через рабочий отвод 55 н золотник 35 реверса поступает в гидро.ми- нию 57, соединяюнхую между собой подводы клапанов ИЛИ 42 и 45, где, перекрыв со- ответственно рабочие отводы 59 и 60, по отводам клапанов 42 и 45 поступает одновременно в Н1токовую полость гидроцп- линдра 7 и поршневую полость гидроцилиндра 15. Поворотная платформа 19 (фиг. 4) перемен1ается слева направо (тон- 5 кие линии). Прп этом слив рабочей жидкости из разноименных полостей гидроцилиндров 7 п 15 происходит через клапаны 41 и 46. гидролипию 58, золотник 35,
5
paoo iiih 56 в сливной канал золотника 34.
На этом : ,аканчивается один цикл шагания. Последующие циклы осуществляются аналогично. Для изменения направления пе- редвижения экскаватора на обратное (справа налево, фиг. 4) двухгюзиционный золотник 35 реверса нереводится в верхнее положение (фиг. 9). Последовательность включения золотников 33 и 34 нри этом остается без изменения.
Для изменения направления нередвиже- ния экскаватора на любое, в том числе и на обратное, используется также поворот поворотной платформы с рабочими оборудованиями с помощью поворотного механизма 23 (фиг. 1), управляемого золотником 63 (фиг. 9). Таким образом, предлагаемое устройство согласования работы силовых цилиндров стрел и рукоятей обеспечивает необходимую простоту и легкость
10
15
обеспечивает увеличение полезных усилий на рабочем органе и, следовательно, увеличение производительности экскаватора.
Развитые опорные поверхности (опорная рама,бащмаки и ковш) обеспечивают уменьшение удельных давлений на грунт как при копании, так и при передвижении экскаватора, что в свою очередь обеспечивает увеличение работоспособности экскаватора в слабых грунтах.
Формула изобретения
Самоходный гидравлический экскаватор, включающий несущую раму, установленную на ней поворотную платформу, два рабочих оборудования со стрелами, рукоятями и связанными с ними рабочими органами, размещенные на противоположных сторонах поворотной платформы, гидравлическую систему с силовыми цилиндрами управления элементами рабочего оборудования и механизм управления экскаватором при передвижении20 поворота рабочего органа с шарнирными собственным ходом.тягами, связанными с ковшом и рукоятью. Предлагаемый самоходный полнопово-отличающийся тем, что, с целью расщире- ротный гидравлический экскаватор отлича-ния технологических возможностей за счет ется прежде всего простотой конструкцииувеличения угла поворота рабочего органа и малым весом за счет исключения са-и повышения устойчивости экскаватора, ниж- мостоятельного ходового устройства (движи-25 ний конец одной из рукоятей снабжен опор- теля) и контргруза, что помимо уменыие-ными башмаками, установленными на нем
посредством поперечной балки, при этом одна из шарнирных тяг выполнена в виде двуплечего рычага, средней частью установленного на рукояти, а вторая тяга установлена накрест с одним из плеч двуплечего рычага.
ния металлоемкости позволяет увеличить надежность и долговечность его.
Использование второго рабочего оборудования в качестве регулируемого контргруза при опрокидывании экскаватора вперед или в качестве упора при опрокидывании назад
У/ ///////// /// /////т/л
обеспечивает увеличение полезных усилий на рабочем органе и, следовательно, увеличение производительности экскаватора.
Развитые опорные поверхности (опорная рама,бащмаки и ковш) обеспечивают уменьшение удельных давлений на грунт как при копании, так и при передвижении экскаватора, что в свою очередь обеспечивает увеличение работоспособности экскаватора в слабых грунтах.
Формула изобретения
Самоходный гидравлический экскаватор, включающий несущую раму, установленную на ней поворотную платформу, два рабочих оборудования со стрелами, рукоятями и связанными с ними рабочими органами, размещенные на противоположных сторонах поворотной платформы, гидравлическую систему с силовыми цилиндрами управления эле
посредством поперечной балки, при этом одна из шарнирных тяг выполнена в виде двуплечего рычага, средней частью установленного на рукояти, а вторая тяга установлена накрест с одним из плеч двуплечего рычага.
69
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоходный гидравлический экскаватор | 1983 |
|
SU1250622A1 |
| СМЕННОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ К ОДНОКОВШОВОМУ | 1965 |
|
SU171809A1 |
| Двухпоточный гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1330277A1 |
| Рабочее оборудование экскаватора | 1988 |
|
SU1548349A1 |
| Рабочее оборудование гидравлического экскаватора | 1981 |
|
SU1008362A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 2018 |
|
RU2709270C1 |
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1313979A1 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| Гидропривод землеройной машины | 1980 |
|
SU1036862A1 |
| Гидропривод стрелы экскаватора | 1989 |
|
SU1661479A1 |
Изобретение относится к горному ма- ниностроению, pacHJHpHeT технологические возможности за счет увеличения угла поворота рабочего органа и повышает устойчивость экскаватора. Это достигается тем, что рабочий орган 11 смонтирован на рукояти 10 с помощью двуплечего рычага 12 и расположенной накрест с одним из его плеч шарнирной тяги 13. На нижнем конце рукояти 10 с помощью поперечной балки 17 шар- нирно смонтированы опорные башмаки 18. Двуплечий рычаг 12 и Н1арнирная тяга 13 образуют механизм поворота рабочим органом 11, обеспечивающий увеличение угла поворота. Новорот рабочего органа 11 осу- Н1ествляется гидроцилиндром 16. Для управления рабочими органами 11 и 3 предусмотрены два трехзолотниковых распределителя. Нижние концы стрел 1 и 9, несущнх рабочие органы 3 и 11, щарннрно укреплены на поворотной платформе 19. На последней смонтированы кабина 22 ман иниста, поворотный механизм и силовая установка 24. 9 ил. S (Л ////////////// /// /// //////////У//////// ///////////////////////////////// фи&. 1 21 СО со СЛ о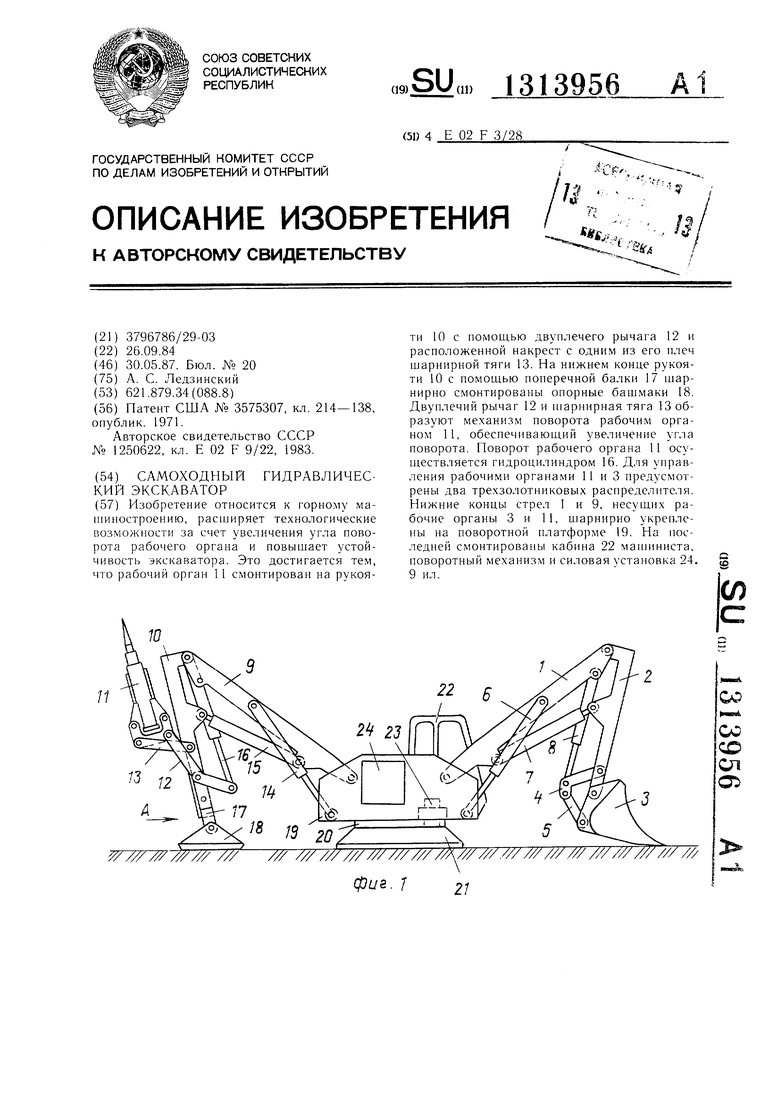
Риг. 6
XV Ч V ,Vue. в
(Риг. 7
iPus. ff
| Патент США № 3575307, кл | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
| Самоходный гидравлический экскаватор | 1983 |
|
SU1250622A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
