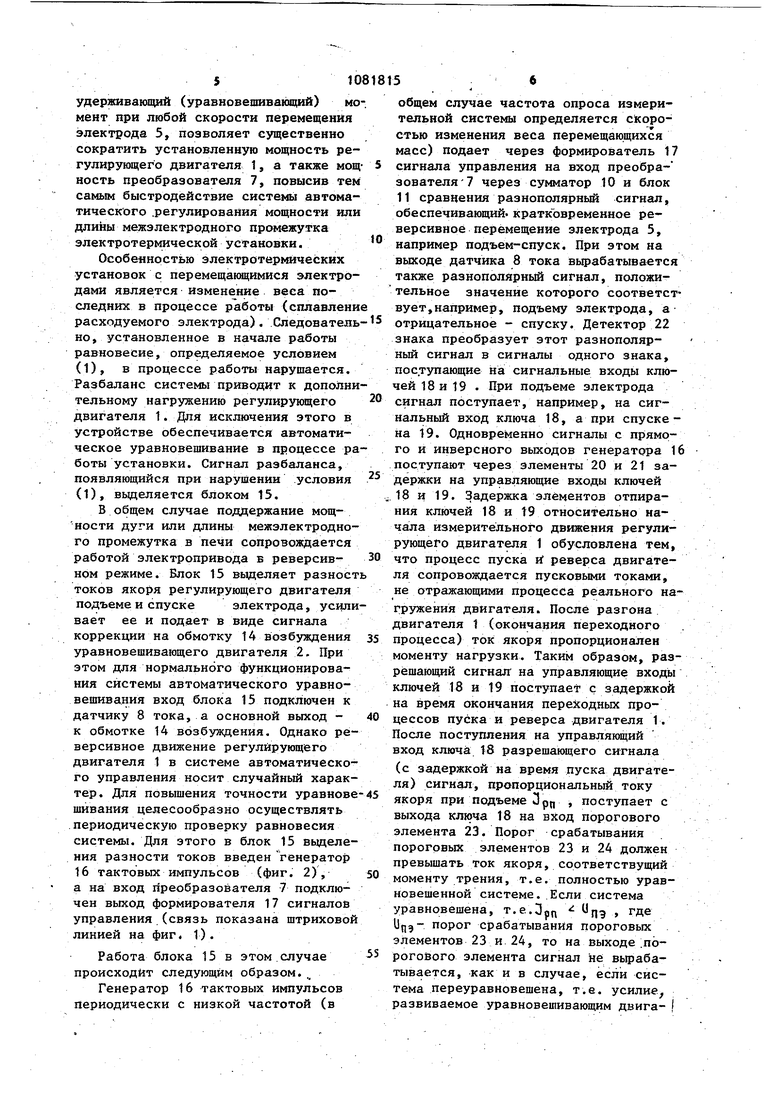
Изобретеняе относится IK электро гермии,ад1ме{1но к механиэхам перемещени электродов электротермических установо и может быть использовано в других стале плавильных печах, установках электрошлакового переплава и т.д. Известно устройство для п€1ремещени электрода электротермической установки, содержащее двигатель, подключенный якорной обмоткой к регулятору и связанный валом с электрододержателем через кинематическую передачу, включающую в себя редуктор и реечную передачу. В указанном механизме для згменьшения мощности двигателя использук)Т противовесы, связанные с электро додержателем посредством троса, перекинутого через РОЛИКИ ij . Недостатком данного устройства явля ется наличие люфтов в кинематической передаче и упругих элементов, что приводит к запаздыванию в отработке возмущений, перерегулирования и колебаниям, препятствующим повьпвению скорости перемещения электрода. Наиболее близким к изобретению по технической сущности является устройство для перемещения электрода электротермической установки, содержащее связанный валом с электродом через кинематическую передачу регулирующий двигатель постоянного тока, обмотка якоря которого связана через реверсив ный датчик тока с выходом тиристорного преобразователя, соединенного входом с выходом блока сравнения, первый вход которогр связан с выходрм регулятораk а второй - с выходом реверсивного датчика тока, и уравновешивающий двигатель поСтоянного тока независимого возбуждения, подключенный обмоткой якоря к выходу источника тока и связанный валом с валом регулируемого двигателя 2j . Недостатком известного устройства является невозможность достижения пол ного уравновешивания вертикально перемещающихся масс при изменении веса рас ходуемого электрода, что приводит к снижению быстродействия механизма и повыше нию мощности регулирующего двигателя. Целью изобретения является повышение быстродействия регулирования режима установки. Поставленная цель достигается тем, что устройство для перемещения электрода электротермической установки, содержащее связанный валом с электродом через кинематическую передачу регулирукшщй двигатель постоянного тока, обмотка якоря которого связана через реверсивный датчик тока с выходом тиристорного преобразователя, соединенного входом с выходом блока сравнения, первый вход которого связан с выходкам регулятора, а второй - с выходомреверсивного датчика тока, и уравновещиваюощй двигатель постоянного тока независимого возбуждения, подключенный обмоткой якоря к выходу .источника тока и связанный валом с валом регулирующего двигателя, снабжено бйоком выделения разности токов Якоря двигателя при прямом и обратном движении, подкл оченным входом к выходу реверсивного датчика тока, а выходом, связанным с обмоткой возб дения уравновешивающего двигателя. Кроме тоГо, блок вьщеления разности токов якоря двигателя при прямом и обратном движении снабжен детектором знака, двумя 1слючами, двумя пороговыми элементами, двумя элементами задержки, формирователем сигнала управления, генератором тактовых импульсов с пряным и инверсным выходом, реверсивным счетчиком и преобразователем код-аналог, выход которого является выходом блока, а. входы подключены к выходам реверсивного Счетчика, входы сложения и вычитания которого через пороговые элементы и ключи соединены с выходами детектора знака, вход которого является входом блока, приче ч управляющие ключей связаны через элементы задержки с прямым и инверсным выходами генератора тактовых импульсов и входами формирователя сигналов управления, а выход формирователя сигналов управления служит Дополнит,ельным выходом блока и связан с первым входом сумматора, включенного между выходом регулятора и первым входом блока сравнения.: На фиг. 1 приведена функциональная схема устройства для перемещения электрода; на фиг. 2 - схема блока вьщелеиия разности токов якОря. . Устройство (фиг. 1) содержит регулирующий 1 и уравновешивающий 2 двигатели постоянного тока независимого возбуждения, валы которых, связанные мезвду Собой (жестко или через промежуточную кинематическую передачу), соединены через кинематическую передачу, включающую в себя редуктор 3 и реечную (или винтовую) передачу 4 с электродом 5, укрепленным на электрододержателе 6. Обмотка якоря регулирующего двигателя 1 подключена к выходу преобразователя (например, тиристорного преобразователя переменного напряжения в регулируемое постоянное) через реверсивный датчик 8 тока якоря (схема подключения датчика тока якоря к преобразователю не является существениой для работы устройства). Регулятор 9, управляющий режимом работы электротермической установки, связан с входом преобразователя 7 через сумматор 10 и блок 11 сравнения. Обмотка 12 возбуждения регулирующего двигателя 1 подключена к источнику постоянного тока Ug . Обмотка якоря уравновешива1рщего двигателя 2 под. к источнику 13 питания со свойствами источника тока (параметрический стабилизатор постоянного то или тйристорный преобразователь постоянного тока с отрицательной обратной связью по току). Обмотка 14 возбуждения уравновешивающего двигателя 2 подключена к основному выходу блока 15 вьщеления разности токов якоря двигателя при прямом и обратном движении.
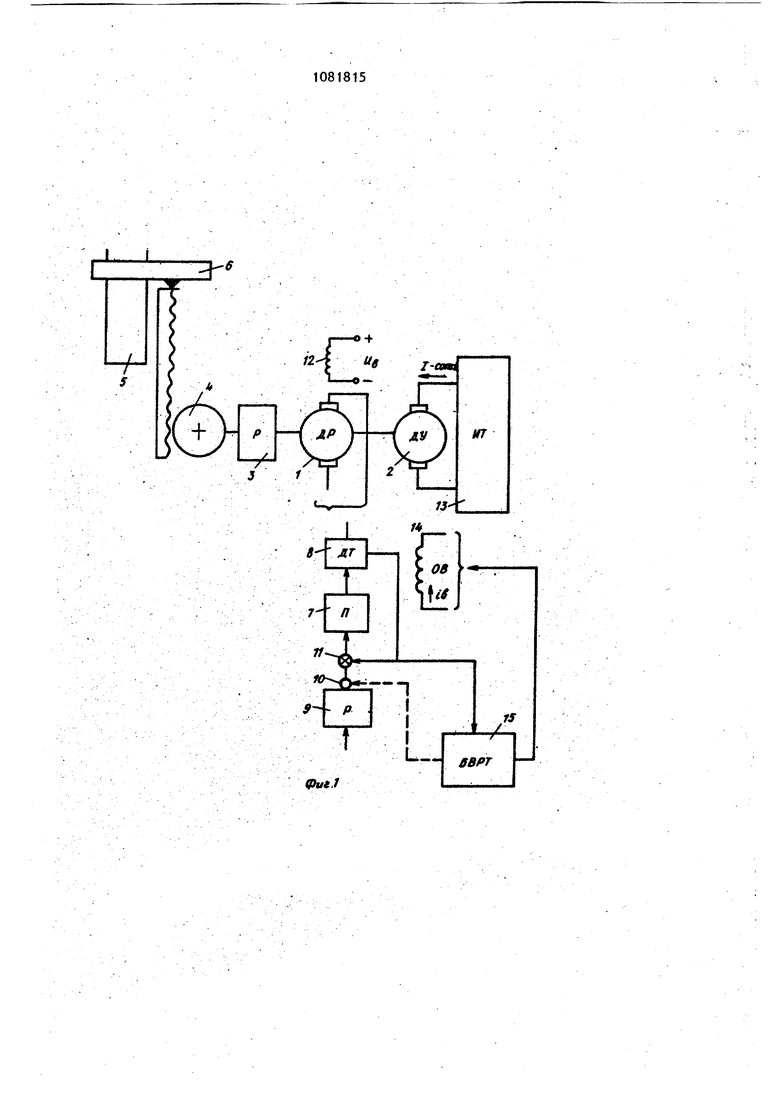
Для повышения точности работы устройства блок 15 вьщеления разности токов целесообразно вьтолнять в ви- де (фиг; 2) генератора 16 тактовых импульсов с прямым и инверсным выходми, подключенными к входам формирова теля 17 сигнала управления и управля щим входом ключей 18 и 19 через элементы 20 и 21 задержки. Сигнальные входы ключей 18 и 19 подключены к выходам детектора 22 знака, соединённого с выходом датчика 8 тока Выходы ключей 18 и 19 через пороговые элементы 23 и 24,; соединенные с входами сложения Сд и вычитания Вч реверсивного счетчика 25, подключенного выходами всех разрядов к входам преобразователя 26 код-аналог. Выходпреобразователя 26 код-аналог соединен с входом усилителя 27. Выход усилителя 27 является основным выходом блока 15 выделения разности токов якоря. Выход формирователя 17 образует дополнительный выход блока 1-5, который подключается к входу преобразователя 7 (показано штриховой линией на фиг. 1).
Устройство работает следующим образом.
Перед началом автоматической работы системы активного уравновешивания электрода оператором на выходе блока 15 устанавливается начальное напряжение И a , соответствукицее начальному значению веса электрода 5 электрододержателя 6 и других вертикально перемещающихся масс (фиг. 1), Начальное значение напряжения на выходе блока 15 выбирается, исходя из условия полного уравновешивания всех вертикально перемещающихся масс механизма, т.е.
(1)
G - Ky.ig. Ijj,
i где G - вес перемещающихся масс; .Км-г.коэффициент пропорциональности, приводящий развиваемый уравновешивающим двигателем 2 момент к весу перемещающихся масс; in- ток возбуждения уравновешивающего двигателя;
1 «
sconst - ток в обмотке якоря уравновешивающего двигателя 2, вырабатываемьш источником 13 тока.
При выполнении условия (1) система оказывается полностью уравновешенной (эквивалентна системе с горизонтально перемещающимися массами) и регулирующий двигатель 1 HarpjTiceH только силами трения. Поскольку силы трения в уравновешенной системе можно считать одинаковыми при подъеме и спуске электрода, то разность тока якоря IP регулирующего двигателя 1 при подъеме 1 и при спуске 1р равна
А1р Ipn - . .
В этом случае блок 15 вь1Деления разности токов дополнительного сигнала не вырабатывает и усилитель 27 блока 15 обеспечивает протекание по обмотке 14 возбуждения уравновешивающего двигателя 2 тока IBHQ соответствуЮщего полному начальному уравновешиванию.
Полное уравновешивание системы вертикально перемещающихся масс с помощью дополнительного уравновешивающёго двигателя 2. развивающего 5108 удерживающий (уравновешивающий) момент при любой скорости перемещения электрода 5, позволяет существенно сократить установленную мощность регулирзпощего двигателя 1, а также мощность преобразователя 7, повысив тем самым быстродействие системь автоматического .регулирования мощности или длины межзлектродного промежутка электротермической установки. Особе«ностью электротермических установок с перемещающимися электродами является изменение веса последних в процессе работы (сплавление расходуемого электрода). СледовательНО, установленное в начале работы равновесие, определяемое условием (1), в процессе работы нарушается. Разбаланс системы приводит к яопопни тельному нагружению регулирующего двигателя 1. Для исключения этого в устройстве обеспечивается автоматическое уравновешивание в процессе ра боты установки. Сигнал разбаланса, появляющийся при нарушении условия (1), выделяется блоком 15. В общем случае поддержание мощности дуги или длины межэлектродного промежутка в печи сопровождается работой электропривода в реверсивном режиме. Блок 15 вьщеляет разност токов якоря регулирующего двигателя подъеме и спуске электрода, усили вает ее и подает в виде сигнала коррекции на обмотку 14 возбуждения уравновешивающего двигателя 2. При этом для нормального функционирования системы автоматического уравновешивания вход блока 15 подключен к датчику 8 тока, а основной выход к обмотке 14 возбркдения. Однако реверсивное движение регулирующего двигателя 1 в системе автоматического управления носит случайный характер. Для повышения точности уравнове шйвания целесообразно осуществлять периодическую проверку равновесия системы. Для этого в блок 15 вьщеления разности токов введен генератор 16 тактовых импульсов (фиг. 2), а на вход преобразователя 7 подключен выход формирователя 17 сигналов управления (связь показана штриховой линией на фиг. 1). Работа блока 15 в этом случае происходит следующим образом. . Генератор 16 тактовых импульсов периодически с низкой частотой (в 5 общем случае частота опроса измерительной системы определяется скоростью изменения веса перемещающихся масс) подает через формирователь 17 сигнала управления на вход преобразователя7 через сумматор 10 и блок 11 сравнения разнополярный сигнал, обеспечивающий, кратковременное реверсивное перемещение электрода 5, например подъем-спуск. При этом на выходе датчика 8 тока вырабатывается также разнополярный сигнал, положительное значение которого соответствует, например, подъему электрода, а отрицательное - спуску. Детектор 22 знака преобразует этот разнополярный сигнал в сигналы одного знака, поступающие на сигнальные входы ключей 18 и 19 . При подъеме электрода сигнал поступает, например, на сигнальный вход ключа 18, а при спускена 19. Одновременно сигналы с прямого и инверсного выходов генератора 16 поступают через элементы 20 и 21 задержки на управляющие входы ключей 18 и 19. Задержка элементов отпирания ключей 18 и t9 относительно начала измерительного движения регулирующего двигателя 1 обусловлена тем, что процесс пуска rf реверса двигателя сопровождается пусковыми токами, не отражающими процесса реального нагрз ения двигателя. После разгона двигателя 1 (окончания переходного процесса) ток якоря пропорционален моменту нагрузки. Таким образом, разрешающий сигнал на управляющие входь ключей 18 и 19 поступает с задержкой на время окончания переходных процессов пуска и реверса двигателя 1. После поступления на управляющий вход ключа 18 разрешающего сигнала (с задержкой на время пуска двигателя) сигнал, пропорциональный току якоря при подъеме Зрп , поступает с выхода ключа 18 на вход порогового элемента 23. Порог срабатывания пороговых элементов 23 и 24 должен превышать ток якоря, сортветствущий моменту трения, т.е. полностью уравновешенной системе. Если система уравновешена, т.е.Орп П9 Д порог срабатывания пороговых , элементов 23 и 24, то на выходе ;пЬрогового элемента сигнал не вьфабатывается, как и в случае, если система переуравновешена, т.е. усилие развиваемое уравновешивающим двига7телем 2, больше веса перемещающихся масс. Пороговый элемент 23 срабатывает только при недостаточной разгрузке системы, когда 3ЯП U пэ . При этом на выходе/порогового элемента 23 .вырабатывается сигнал логической единицы, который поступает на вход сложения СА реверсивного счетчика 25. Число, соответствующее начальному уравновешиванию системы, может устанавливаться либо вручную оператором, либо автоматически при переводе системы в режим автоматиче ского слежения за изменяющимся весом электрода 5. Сигнал с прямого выхода генерато ра 16 обеспечивает подачу на вход преобразователя 7 напряжения, соответствующего подъему, электрода 5, и отпирание ключа 18. Сигнал с инверсного выхода генератора 16 обеспечивает спуск электрода 5, и с задержкой на время переходного проц са, определяемой элементом 21, разрешает работу ключа 19. При этом на вход порогового элемента 24 поступа ет сигнал рс . Здесь так же, как и при подъеме электрода, возможны три случая. Когда система уравновешена, t} о ( U(|. и сигнал, на. выходе РС nэ, порогового элемента 24 не вырабаты вается (присутствует сигнал логического нуля). При недоуравновешивани системы (когда усилие, развиваемое уравновешивающим двигателем 2, мень ше веса перемещающихся масс) «U|,5 и на выходе элемента 24 также имеет место сигнал логического нуля Пороговый элемент 24 срабатывает, и на его выходе вырабатывается сигнал логической единицы только в слу чае переуравновешивания системы. При этом сигнал логической единицы поступает на вход вычитания Вм реверсивного счетчика 25, уменьшая на единицу записанное в нем число. Таким образом, в работе блока 15 вьщеления разности тока якоря воз15можны три режима: импульсы на входы реверсивного счетчика ,25 не поступа ют, что соответствует полностью уравновешенной системе; импульсы поступает на вход сложения Сл реверсивного счетчика 25, что соответствует неДоуравновешенной системе; импульсы поступают на вход вычитания Рр реверсивного счетчика 25, что соответствует переуравновешенной системе. За один измерительный такт, генератора 16 число, записанное в счетчике 25, изменяется на единицу. Если . разбаланс системы превышает этот уровень, что может иметь место при начальном уравновешивании системы или скачкообразном изменении веса перемещающихся масс, то уравновеши- ванне системы происходит за несколь ко измерительных тактов, поскольку импульсы на соответствукнцие входы реверсивного счетчика 25 поступают до тех пор, пока система не будет уравновешена. Реверсивный счетчик 25 выполняет функции вьщеления разности тока якоря йЗр .при подъеме и спуске электрода н запоминания этой разности. Преобразователь 26 код-аналог преобразует число, записанное в счетчике 25, в аналоговьй сигнал, который управляет усилителем 27, питающим обмотку 14 возбуждения уравновешивающего двигателя 2.. Автоматическое слежение за изменяющимся весом вертикально перемещающихся масс электротермической ,ус- . тановки существенно, облегчает режим работы регулирующего двигателя 1 и преобразователя, позволяет снизить их мощность и тем самым повысить быстродействие и точность системы автоматического управления электротермической установкой, повысив в конечном итоге ее производительность, и улучшить качество выплавляемого металла.
лг
/7А4
9
-

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электротермической установкой с расходуемым электродом | 1983 |
|
SU1156269A1 |
| Устройство для определения веса расходуемого электрода электротермической установки | 1982 |
|
SU1068724A1 |
| Устройство для регулирования мощности дуговой электропечи | 1981 |
|
SU991624A1 |
| Устройство для плавного пуска электроподвижного состава | 1969 |
|
SU279697A1 |
| Электропривод постоянного тока с потенциальным моментом нагрузки | 1987 |
|
SU1436257A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УДЕЛЬНОЙ ЭЛЕКТРОПРОВОДИМОСТИ МОРСКОЙ ВОДЫ | 2007 |
|
RU2366937C2 |
| Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1394383A1 |
| Электропривод постоянного тока с потенциальным моментом нагрузки | 1988 |
|
SU1651350A1 |
| Устройство для управления преобразователем переменного напряжения асинхронного двигателя | 1982 |
|
SU1097156A1 |
| Вентильный электродвигатель | 1986 |
|
SU1328891A2 |

1. УСТРОЙСТВО ДЛЯ ЛЕРЕМЕЩЕНИЯ ЭЛЕКТРОДА ЭЛЕКТРОТЕРМИЧЕСКОЙ. УСТАНОВКИ, содержащее связанный валом с электродом через кинематическую передачу регулирующий двигатель постоянного тока, обмотка якоря которого связана через реверсивный датчик тока с выходом тиристорного преобразователя, соединенного входом с выходом блока сравнения, первый вход которого связан с выходом регулятора, а второй - с выходом реверсивного датчика тока, и уравновешивающий двигатель постоянного тока независимого возбуждения, подключенный обмоткой якоря к выходу источника тока и связанный валом с ва6ЙЬ.,г лом регулирующего двигателя, отличающееся тем, что, с целью повьшения быстродействия регулирования режима установки, оно снабжено блоком вьщеления разности токов якоря двигателя при прямом и обратном движении, подключенным входом к выходу реверсивного датчика тока, а выходом, связанным с обмоткой возбуждения уравновешивающего двигателя. 2. Устройство по п. 1, о т личающееся тем, что блок вьщеления разности токов якоря дви- гателя при прямом и обратном движении снабжен детектором знака, двумя ключами, двумя пороговыми элемента(Л ми, двумя элементами задержки, формирователем сигнала управления, генератором тактовых импульсов с прямым и инверсным выходами, реверсивным счетчиком и преобразователем код,аналог, выход которого является выходом блока, а входы подключены к выходам реверсивного счетчика, входы сложения и вычитания которого через пороговые элементы и ключи соединены j с выходами детектора знака, вход которого является входом блока, причем : ел управляющие входы ключей связаны че- . рез элементы задержки с прямым и инверсным выходами генератора тактовых импульсов и входами формирователя сигналов управления, а выход формирователя сигналов управления слзпкит дополнительным выходом блока и связан с первым входом сумматора, включенного между выходом регулятора и первым входом блока сравнения.
ФС9
Кп е азовате4м
352
-21
20
-16
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Фаркасов F.A, Автоматизация процессов электропдавки стали | |||
| М., Металлургия, с | |||
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| Соколов М.М | |||
| и др | |||
| Электропривод перемещения электродов дуговых электрических печей | |||
| - Электротехническая промьппленность, 1982, № 5, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
