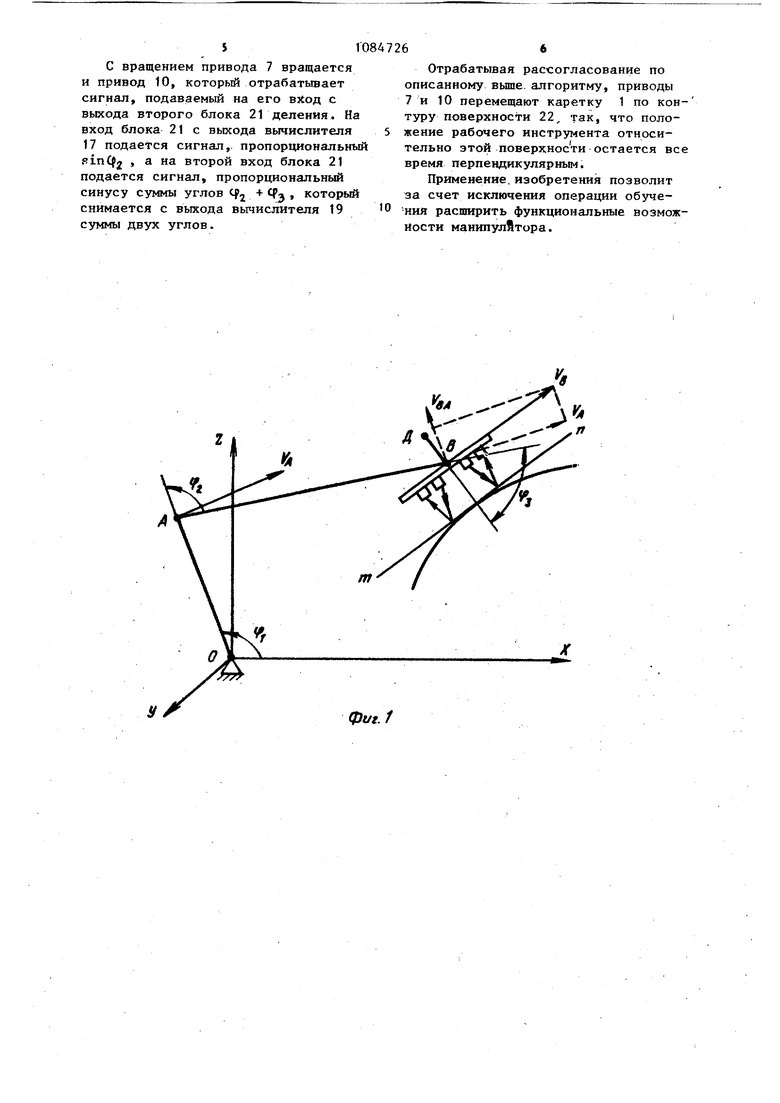
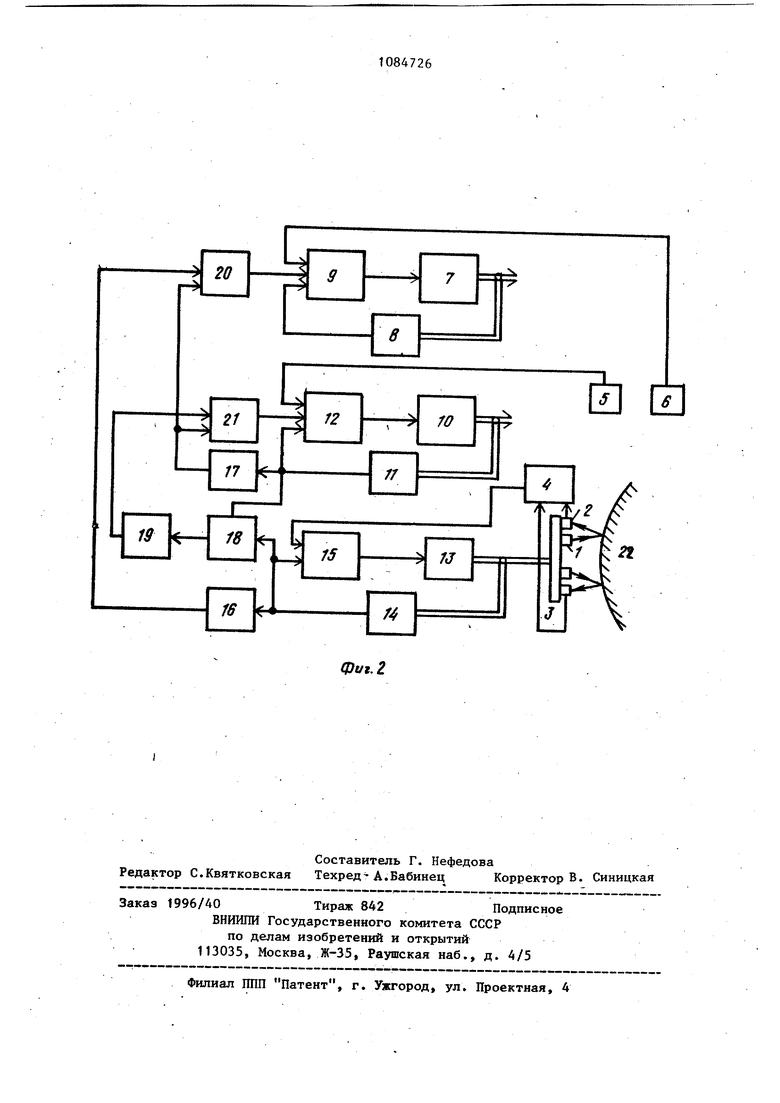
Изобретение относится к робототе нике и может быть использовано при создании манипуляторов для роботов окрасчиков. Известно устройство для управле ния манипуляторами, содержащее пул управления и по каждой регулируемо координате сервоусилитель, привод и датчик положения, которое работае только по жесткой программе ij . Наиболее близким к предлагаемому является устройство, содержащее по первой, второй и третьей регулируемой координате последовательно соед ненные соответствующие сервоусилитель и привод, связанный с соответствукицим датчиком положения, выход которого подключен к входу соответствующего сервоусилителя 2j. Недостатками известного устройст ва являются необходимость обучения робота и записи программы в память ЧТО снижает производительность робота при мелкосерийном производстве и требует большого объема памяти для записи траектории при его обучении. Цель изобретения - расширение функциональных возможностей устройства за счет обеспечения выполнения заданного технологического процесса без операции обучения. Поставленная цель достигается тем, что в устройство, содержащее по первой, второй и третьей регулируемой координате последовательно соединенные соответствующие сервоус и привод, связанный с соответствующим датчиком положения, выход которого подключен к входу соот ветствующего сервоусилителя, введены установленные на каретке источники и приемники излз 1ения, блок сравнения, первый синусный вычислитель, первый и второй источники опорного сигнала, последовательно соединенные второй синусный вычислитель и первый блок деления, а так же последовательно включенные сумма тор, третий синусный вьиислитель и второй блок деления,- второй вход которого через второй синусньй вычислитель подключен к выходу второго датчика положения, а выход - к второму входу второго сервоусилителя, соединенного третьим входом с выходом первого источника опорного сигнала, первый вход сумматора подключен к выходу второго датчика положения, а второй вход - к выходу третьего датчика положения и входу первого синусного вычислителя, выход которого соединен с вторым входом первого блока деления, подключенного выходом к второму входу первого сервоусилителя, третий вход которого соединен с выходом второго источника опорного сигнала, выходы приемников излучения подключены к входам блока сравнения, выход которого соединен с вторым входом третьего сервоусилителя. На фиг. 1 приведена кинематическая схема манипулятора; на фиг. 2 функциональная схема устройства. На фиг. 1 указаны X, Y, Z - оси координат, ОА, АВ и BD - звенья манипулятора ;Ср , ср, yij- углы поворота звеньев; тп - траектория перемещения; Уд, Vg, Удд - вектор ы скоростей соответствующих точек. Устройство содержит источники 1 излучения, приемники 2 излучения, каретку 3, блок 4 сравнения, первьй и второй источники 5 и 6 опорного сигнала соответственно, первый привод 7, первый датчик 8 положения, первый сервоусилитель 9, второй привод 10, второй датчик 11 положения, второй сервоусилитель 12, третий привод 13, третий датчик 14 положения, третий сервоусилитель 15, первый и второй синусные вычислители 16 и 17 соответственно, сумматор 18, третий синусный преобразователь 19, первый и второй блоки 20 и 21 делителя, поверхность 22 изделия. Устройство работает следукн им образом. При работе манипулятора должны выполняться следующие условия: точка В должна двигаться по траектории, совпадающей с направлением поверхности 22, звено BD (рабочий инструмент) должно двигаться, оставаясь перпеникулярным к траектории движения, линейная скорость точки В - Vn должна быть постоянна и равна Vjg.. Пусть манипулятор движется в плоскости ХО по траектории XOZ со скоростью Vg. При этом скорость очки В геометрически складывается из скоости точки А и скорости точки В в е вращательном движении вместе со 8«НОМ АВ Vfc V8д
Звено ОА имеет одну степень свободы - вращение вокруг шарнира О. Следовательно, для скорости Уд имеем
д D,. Г, с, Г, ,
(1)
V
гдейо - угловая скорость вращения
звена ОА;
f;, - длина звена ОА; О - угол между звеном ОА и
осью ОХ.
Скорость движения точки В относительно точки А Wf 2 2 где C3,2 угловая скорость вращения звена АВ; ,j - длина звена АВ; (2 угол между звеном АВ и на правлением звена ОА. Отсчет углов ( , tp С|а ведется от исходного положения манипулятор когда его звенья вытуняты вдоль оси ОХ. Из геометрических соотношений можно определить, что V V, А Sin ф2 V sinCCf + tfO РА В sin if2 Подставляя значения и Vn в (1) и (2), получаем (i УЁ. 1 sinCf2 « V9 sin(() fi 1 sinCf2 ИЗ (5) и (6) следует, что для движения рабочего инструмента по трае тории mn со скоростью Vg необходимо задать начальные углы Я дИСр2 поместить точку В (рабочий инструмент) перпендикулярно траектории движения тп (таким образом определ угол tf:) ) и поддерживать перпендикулярность рабочего инструмента пр дальнейшем движении по траектории автоматически вращая звено ОА со скоростью (f, , а звено АВ со скоростью (2 Структурная схема устройства управления может быть получена из приближенных уравнений, списывающи многокоординатный манипулятор как объект управления, а именно
а -( а( Д- первой координаты (7 о Д- второй координаты а cp-fa iCpj KjUj для третьей координаты
а,,- Ед, коэффициент
а,, 3 коэффициент J
и , Uj, ,1)3 - задающее воздействие на входе объекта управления;
К|, Kj , Kj -коэффициенты.
Подставим (5) и (6) в (7), полуsintf для и. -ср,.А sinq. KI первого звена (8) зшСсрг + Ч) tf второго звена. Под действием напряжений U и Uj которые формируются в источниках 5 и 6 опорного напряжения и подаются на сервоусилители 9 и 12, начинают двигаться первая и вторая координаты. В результате каретка 1 будет перемещаться, например, сверху вниз. Положение каретки 1 относительно рабочей поверхности 22 поддерживается неизменным за счет сигналов, снимаемых с выходов приемников 2. Сигналы с выходов приемников 2 подаются на блок 4 сравнения. При появлении разности сигналов на выходе блока 4 привод 13 начинает отрабатьшать рассогласование между приемниками 2, поворачивая каретку 1 до тех пор пока разность сигналов на выходе блока 4 не станет равной нулю. При вращении привода 13 изменяется и сигнал с датчика 4 положения пропорционально углу поворота Ср каретки 1. Этот сигнал через вычислитель 16 sincp подается на вход первого блока.20 деления. Одновременно с вращением привода 13 вращается и привод 10 и с его датчика 11 положения через вычислитель 17 на второй вход блока 20 деления подается значение sinCf сигнал с выхода блока 20 подается на вход сервоусилителя привода 7, который будет, отрабатьшать сиг«ал, вызванный изменением угла поворота Срз кареткой 1.
С вращением привода 7 вращается и привод 10, который отрабатьгоает сигнал, подаваемый на его вход с выхода второго блока 21 деления. На вход блока 21 с выхода вычислителя 17 подается сигнал, пропорциональный из второй вход блока 21 подается сигнал, пропорциональный синусу суммы углов cfj + 3 который снимается с выхода вычислителя 19 суммы двух углов.
Отрабатывая рассогласование по описанному вьше. алгоритму, приводы 7 и 10 перемещают каретку 1 по контуру поверхности 22, так, что положение рабочего инструмента относительно этой поверхности остается все время перпендикулярным.
Применение, изобретения позволит за счет исключения операции обучения расширить функциональные возможности манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления телевизионной системой манипуляционного робота | 1988 |
|
SU1732495A1 |
| Самонастраивающийся электропривод манипулятора | 2016 |
|
RU2631784C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2706079C1 |
| Самонастраивающийся электропривод манипулятора | 2016 |
|
RU2631783C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2705737C1 |
| НЕЛИНЕЙНАЯ РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2008 |
|
RU2397509C2 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Устройство для имитации движения судна вблизи берега | 1982 |
|
SU1084830A1 |
| УСТРОЙСТВО для ПОСТРОЕНИЯ ТРАЕКТОРИЙ | 1973 |
|
SU397929A1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ, содержащее по первой, второй и третьей регулируемой койрдинате последовательно соединенныё сервоусилитель и привод, связан- ный с соответствуюпщм датчиком положения, выход которого подключен к входу соответствующего сервоусилителя ,о тли чающее ся. тем, что, с целью распюрения;функциональных возможностей за счет обеспечения выполнения заданного технологического процесса без операции обучения, устройство содержит установлен ные на картотеке источники и приемники излучения, блок сравнения, первый синусный вычислитель, первый и второй источники опорного сигнала, последовательно соединенные второй синусный вычислитель и первый блок деления, а также последовательно включенные сумматор, третий синусньй вычислитель и второй блок деления, ,. второй вход которого через второй синусный вьгаислитель подключен к выходу второго датчика положения, а выход - к второму входу второго сервоусилителя, соединенного третьим входом с выходом первого источника опорного сигнала, первый вход сумматора подключен к выходу второго г датчика положения, а второй вход к выходу третьего датчика положения и входу первого синусного вычислителя, выход которого соединен с вторым входом первого блока деления, подключенного выходом к второму входу первого сервоусилителя, третий вход которого, соединен с выходом второго источника опорного сигнала, выходы приемников излучения подключены к х входам блока сравнения, выход кото1 рого соединен с вторым входом третьего сервоусшштеля. ю д
15
16 и
f4
фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
