2.Элек тропривбд по п. 1, о т л и ч а ю ш и и с я тем, что в канал регулирования модуля главного потокосцегше- ния двигателя введены последовательно соединенные второе апериодическое звено, второй блок сравнения и второе звено пропорционального преобразования, выход которого соединен с третьим входом второго сумматора, вход второго апериодического звена - с выходом блока задания модуля, а дополнительный вход второго блока сравнения - с выходом вычислителя модуля главного потокосцепления
3.Электропривод по пп. 1 и 2, о т личающийся тем, что суммирук ший апериодический усилитель тригонометрического анализатора снабжен дополнительным входом, подключенным к выходу блока задания частоты.
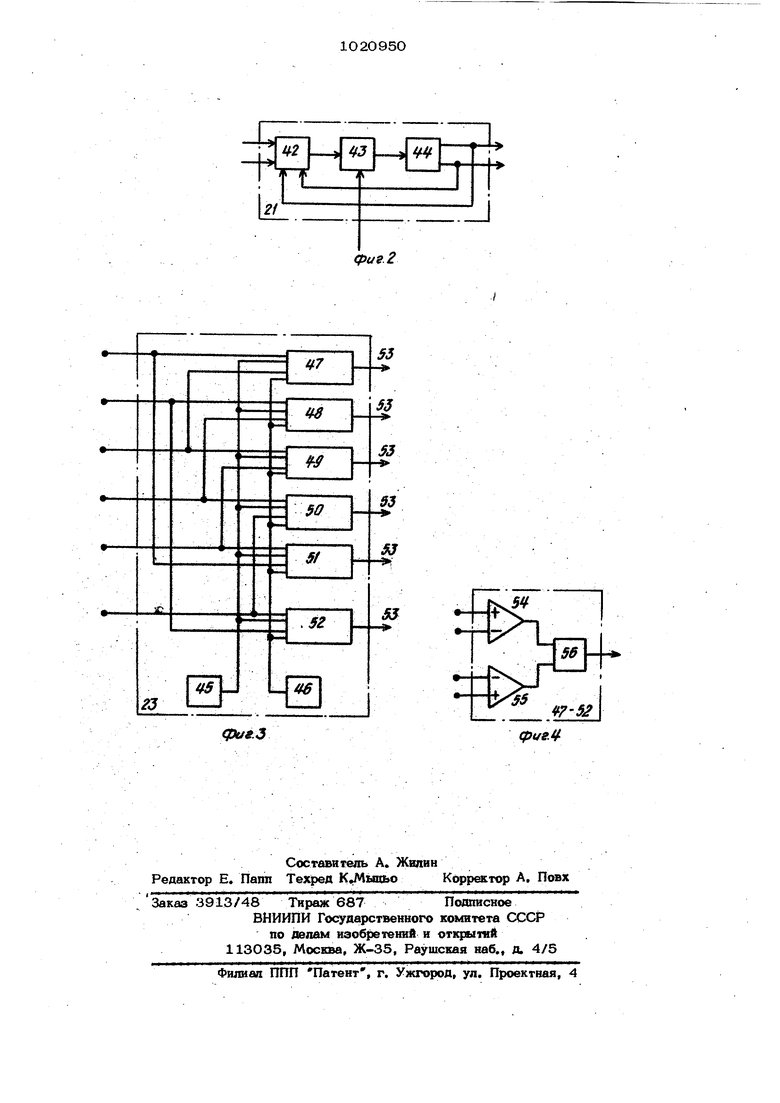
4.Электропривод по пп. 1 и 2, о т личающийся тем, что формирователь импульсов содержит источник модулирующего напряжения, блок управления и логические блоки по числу вентилей инвертора, каждый из которых составлен из первого и второго компараторов, подключенных выходами к логическому элементу И, при этом неинвертирунмций вход первого компаратора подключен к одному из выходов блока фазных преобразований, инвёртирукиций вход второго компаратора - к другому выходу блока фазных преобразований с напряжением, сдвинутым по фазе на 12О эл. град, относительно напряжения с первого выхода, инвертирующие входы первых компараторов логических блоков объединены и подключены к выходу источника модулирующего напряжения, а неинвертирующие входы вторых компараторов логических схем объединены и подключены к выходу блока управления.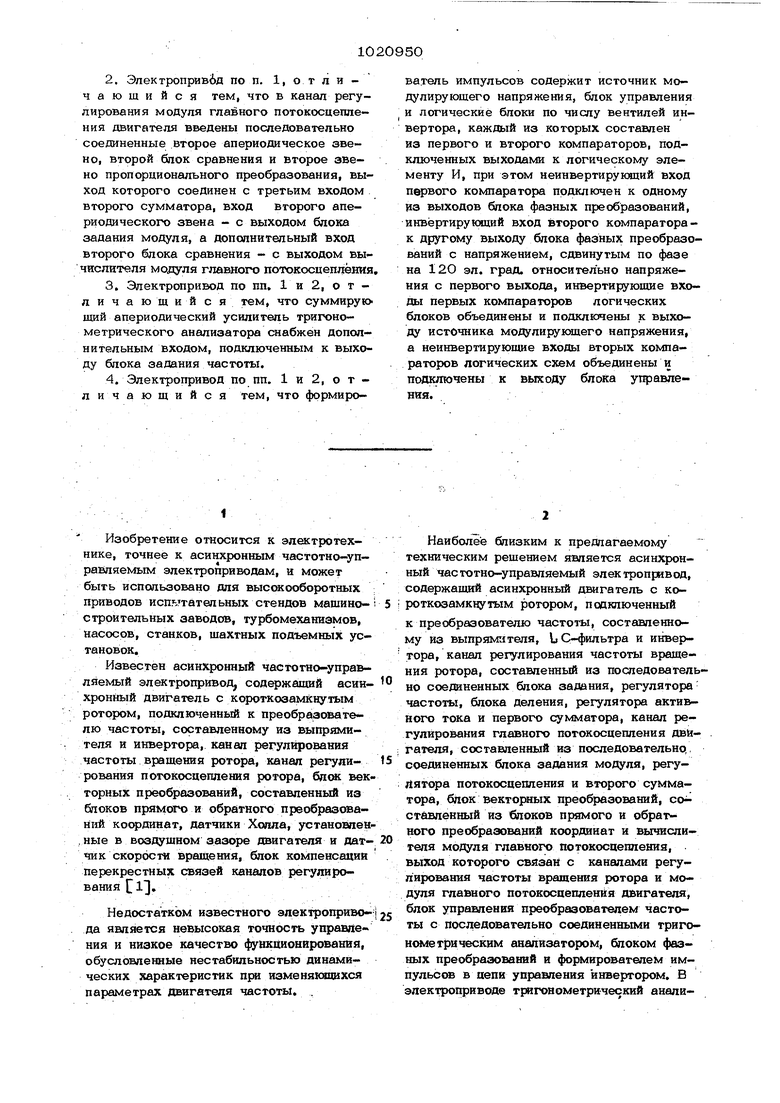
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Электропривод с векторным управлением | 1985 |
|
SU1292153A1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
1. АСИНХРОННЫЙ ЧАСТОТНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД, сод)жа11шй всинх|юнный двигатель с кор6ткозамкиуп 1м ротором,подключенный к преобразователю частоты, составпеннаму из выпрямителя, ЬС-фильтра и иввертора, канал регулирования частоты .вращения рот(фа, составленный из последовательно схзединенных блока задания частоты, регулятора частоты, блока деления, регулятора, активного тчжа и nejiffioro : сумматора, канал ретулирования моЬуля главного потокосиесбгения двигателя, составленный вэ последсшатеш но соединенных б1яока задания модулШ, регулятора пот ж0сиепления и второчпо сумматора, векторных ореобразованиЩ составленный из блоков прямого и обратного преобразований координат и вычислителя модуля главного пот(жосаеш1е1Ь1я, выход которого связан с каналами регулирования часто- . ты вращения ротора и модуля главноГо потокосоепления двигателя, блок уп:р эаения преобразователем частоты с последовательно соединенными тригонометрическим анализаторе, блоком фазных преобразований и фopмиpoвaтeп SlI импульсов в цепи управления инвертором, прю этом трнгонометричесвяй анализатор выполнен в виде последовательно соединенных фазирующего блока, суммируюшего аперюдического усилителя а синусно-ко- синусного генератора, датчик частоты ращения ротора, связанный с каналом регулирования частоты врашения ротора, датчики фазных токов, соединенные с входами блока обратного преобразования ко ординат, датчики Холла, установленные . в воздушном зазоре двигателя и связанные с входами для га шонических функ цнй блоков прямого в обратного преобра-зования координат и входами вычислите- ля модуля главного потокосцепления, блок компенсаш1И перекрестных связей каналов регулирования соединенный ьходамИ с выходами датчика частоты вращения ротора, вычислителя модуля главного потокосиепления и блока обратного тфеобразования координат, а выходами - с вторыми входами первого и -второго сумматоров, выходы которых через блок.прямо10 го преобразования кооршшат соединены О с первыми двумя входакга тритчшометрисо ческого анжизатсфа, отличающийся тем, что, с целью повышения СП точности управления, введены последовательно соешнённые первое апериодическое звено, первый блса сравнения и первое звено провюроиовального преобразования, выход которото соединен с третьим входом первого сумматора, вход первого шюриодического звена - с выходом блока деления, а дополнительный вход первого блока с ввения - с выходом блока обратного преобразования координат.
-.;,-. 1 . ,
Изобретение относится к электротехнике, точнее к асинхронным частотно-управляемым электроприводам, и может быть использовано для высокооборотных приводов испьтательных стендов машиностроительных заводов, турбомеханизмов, насосов, станков, шахтных подъемных установок.
Известен асинхронный частотно-управляемый электропривод, содержащий асинхронный двигатель с короткозамкнутым ротором, подключенный к преобразователю частоты, составленному из выпрямителя и инвертора, канал регул11рования частоты вращения ротора, канал регулирования потокосцепления ротора, векторных преобразований, составленный из блоков прямого и обратного преобразований кос динат, датчики Холла, установпен, ные в воздушном зазоре двигателя и датчик скорости вращения, блок компенсации перекрестных связей каналов регулирования
Недостатком известного электропривода является невысокая точность управйения и низкое качество фувкционировання, обусловленные нестабильностью динамических характеристик при изменякшшхся параметрах двигателя частоты. .
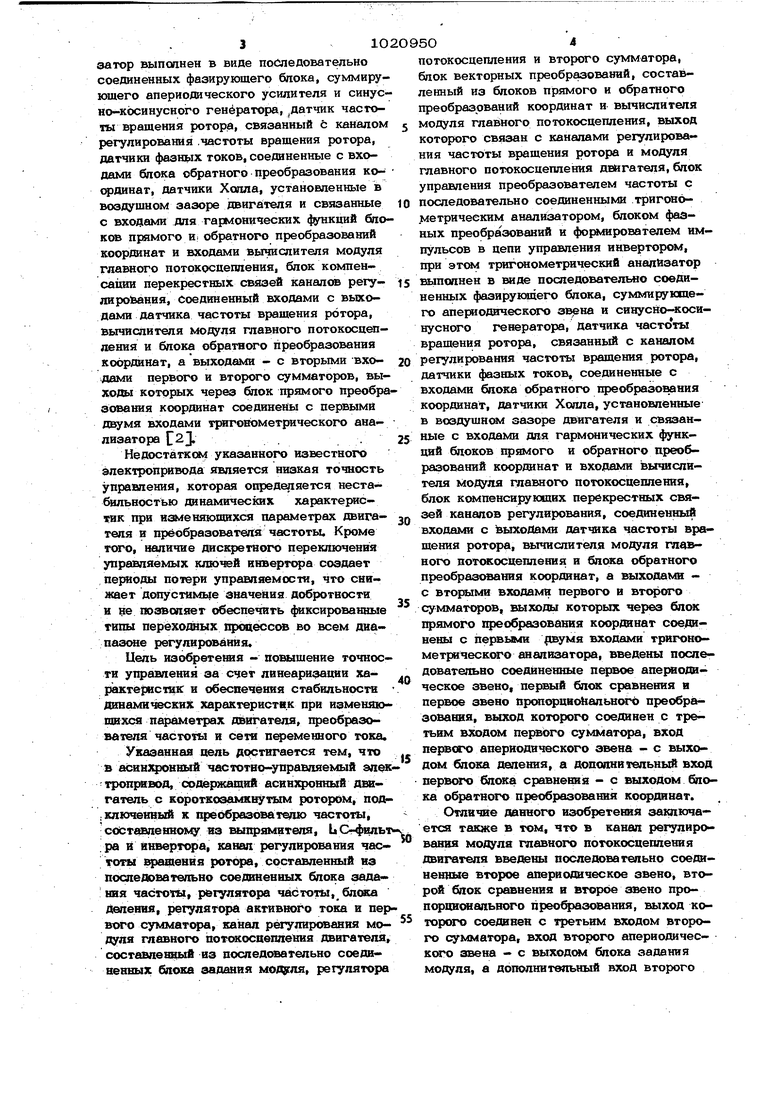
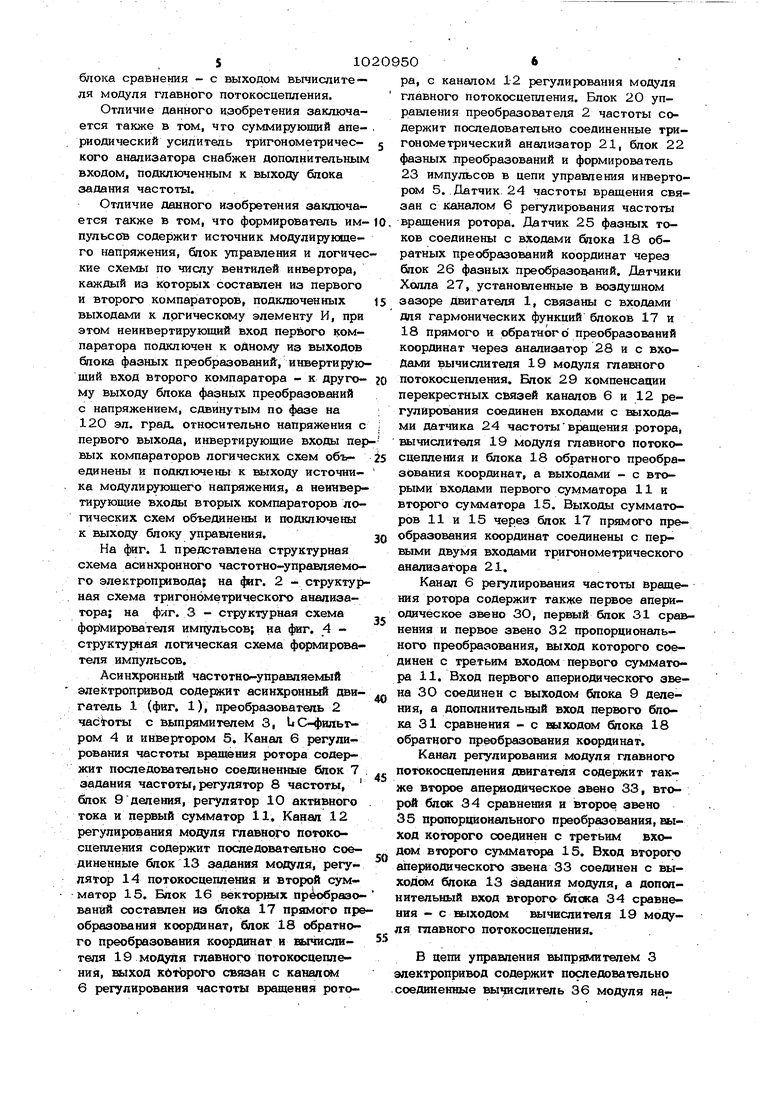
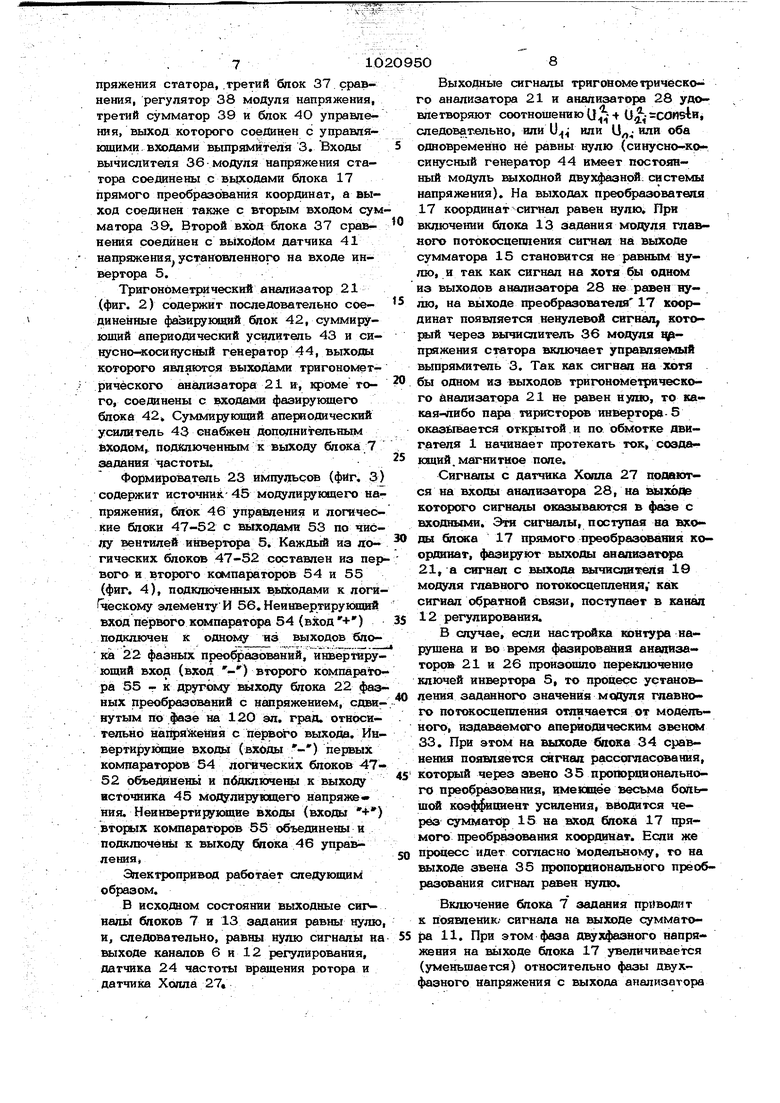
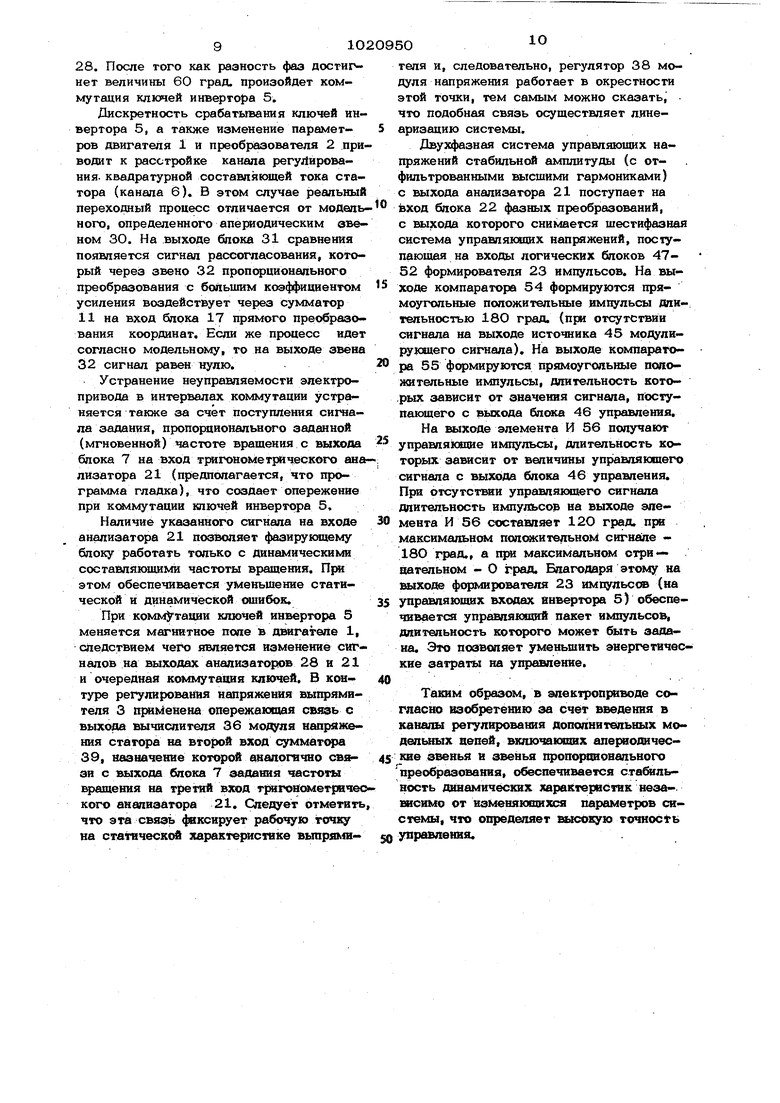
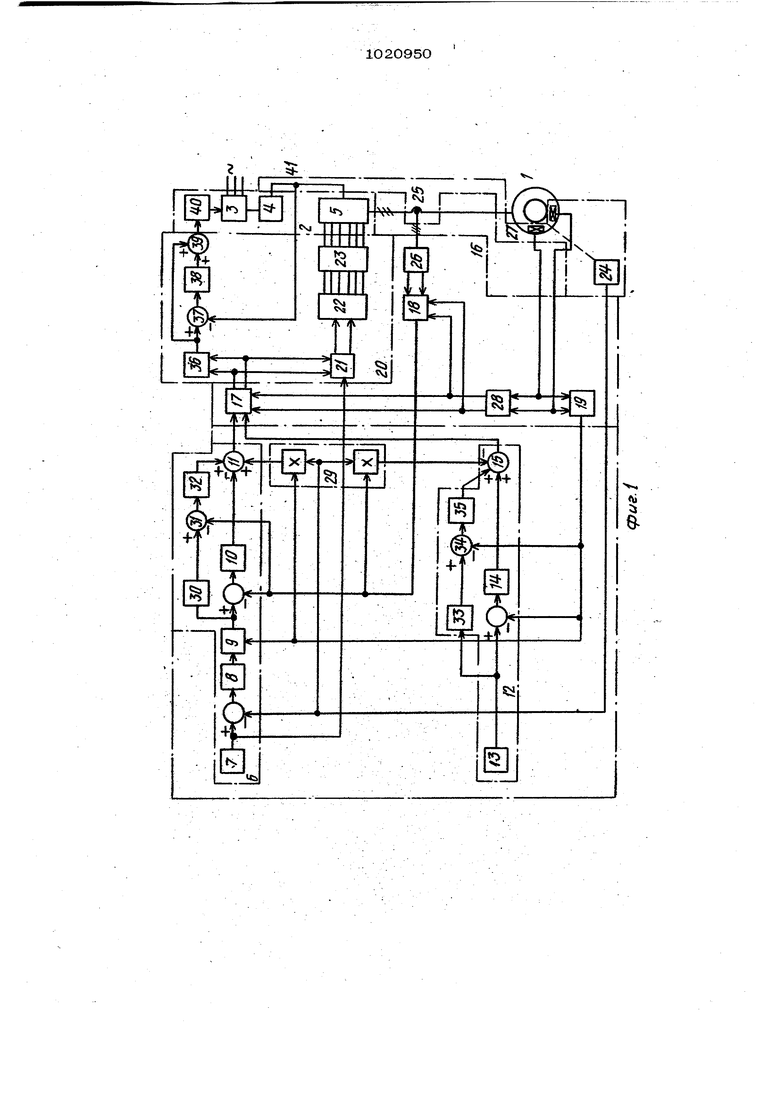
Наиболее близким к предлагаемому техническим решением является асинхронный час тотно-управляемый элек тропривод, содержащий асинхронный двигатель с короткозамкну1Ъ1м ротором, подключенный к преобразователю частоты, составленному из выпрямителя, Ь С-фильтра и инвертора, канал регулирования частоты вращения ротора, составленный из последовательно соединенных блока задания, регулятора частоты, блока деления, регулятора активного тока и первого сумматора, канал регулирования главного потокосцепления двигателя, составленный из последовательно,, соединенных блока задания модуля, регулятора потокосцепления и второго сумматора, блок векто|Я1ых преобразований, со ставленный из блоков npsiMoro и обратного преобразований коорданат и вычислителя модуля главного потокосоепления, выход которого связан с каналами регулирования частоты вращения ротора и модуля главного потокосцепленйя двигателя, блок упраъпеккя преобразователем частоты с последовательно соединенными тригонометрическим анализатором, блоком фазных преобразований я формирователем импульсов в цепи управления инвертором. В электроприводе тригонометрический анализатор выпспнен в виде последовательно соединенных фазирующего блока, суммирующего апериодического усилителя и синус но-косинусного генератора, .датчик частоты вращения pOTOpifl, связанный 6 каналом регулирования .частоты вращения ротора, датчики фазных токов, соединенные с входами блока обратного преобразования ко(фдинат, датчики Хошга, установленные в воздущном зазоре двигателя и связанные с входами для гармонических функций бло ков прямого И обратного преобразований координат и входами вычислителя модуля главного потокосцепления, блок компенсации перекрестных связей каналов регулиро1вания, соединенный входами с выходами датчика частоты вращения ротсфа, вычислителя модуля главного потокосцепления и блока обратного преобразования координат, а выходами - с вторыми вхо.дами первого и второго сумматоров, выходы которых через блок прям сяо преобра зования координат соединены с первыми двумя входами тригонометрического анализатора ... Недостатком указанного известного электропривода является низкая точность управления, которая огфедетяется нестабильностью динамических характеристик при изменяющихся параметрах двигателя и преобразоватепя частоты. Кроме того, наличие дискретного переключения управляемых ключей инвертора создает периоды потери управляемости, что снижает допустимые значения добротности и не позволяет обеспечить фиксированные типы перёхо/шых прс1щеюс(ж во всем днапаз же регулированияи Цель изобретешя - повышение точности управления за счет линеаризации характё жстик и обеспечения стабильности динамических характеристик при изменяющихся параметрах двигателя, преобразователя частоты и сети племенного тока. Указанная цель достигается тем, что в асинхронный частотно-управляемый злек - тропривод, содержащий асин:фонный двигатель с короткозамкнутым ротором, поо;КЛ10ченный к преобразователю частотам, со&тстленному из выпрямителя, ЬСгфилм ра и инвертора, канал регулирования чаототы вращения ротора, составленный из последовательно соединенных блока задания частот, регулятора частоты, блока дю1ения, регулятора активного тока и пер всиО сумматора, канал регулирования модуля главного потокосцеплеъия двигателя, составпешцлй из последовательно соединенных блока задания модгсля, регулятора потокосцепления и второго сумматора, блок векторных преобразований, составленный из блоков прямого и обратного преобразований координат и вычислителя модуля главного потокосцепления, выход которого связан с каналами регулирования частоты вращения ротора и модуля главного потокосцепления двигателя, блок управления преобразователем частоты с последовательно соединенными тригонометрическим анализатором, блоком фазных преобразований и формирователем импульсов в цепи управления инвертором, при этом тригонометрический анализатор выполнен в виде последовательно соединеннь1Х фазирукщего блока, суммирующего апериодического ЗЕивна и синусно-косинусного генератора, датчика частоты вращения ротора, связанный с каналом регулирования частоты вращения ротора, датчики фазных токов, соединенные с входами блока обратного преобразования координат, датчики Холла, установленные в воздушн ял зазоре двигателя и связанные с входами для гармонических функций блоков прямого и обратного преобразований координат и входами вычислителя модуля главного потокосцепления, блок компенсируюших перекрестных связей каналов регулирования, соединенный входами с выходами датчика частоты вращения ротора, гаычислителя модуля главного потокосцепления и блока обратного преобразования координат, а выходами с вторыми входами первого и сумматсфов, выходы которых через блок прямого преобразования коор ганат соединены с первыми |1вумя входами тригонометрического анализатора, введены последовательно соединенные первое апериодическое звено, первый блок сравнения в первое звено пропорционального преобразования, выход которого соединен с третьим входом первого сумматора, вход первого апериодического звена - с выходом блока деления, а дополнительный вход первого блока сравнения - с выходом блока обратного преобразования координат. Отличие данного изобретения заключается также в том, что в канал регулирования модуля главного потокосцепления Двигателя введены последовательно соединенные второе а1тариодическое звено, второй блок сравнения и второе звено пропорци(жального прео€| азсдаания, выход которого соединен с третьим входом второго сумматора, вход второго апериодического звена - с выходсял блока задания модуля, а дополнительный вход второго блока сравнения - с выходом вычислителя модуля главного потокосцепления. Отличие данного изобретения заключается также в том, что суммирующий аиериодический усилитель трйгонометрического анализатора снабжен дополнительным входом, подключенным к выходу блока задания частоты. Отличие данного изобретения заключается также в том, что формирователь им- пульссяэ содержит источник модулирующего напряжения, блок управления и логичес кие схемы по числу вентилей инвертора, каждый из которых составлен из первого и второго компараторов, подключенных выходами к логическому элементу И, при этом неинвертирующий вход пербого компаратора подключен к одному иэ выходов блока фазных преобразований, инвертирую щий вход второго компаратора - к другому выходу блока фазных преобразований с напряжением, сдвинутым по фазе на 12О эл. град, относительно напряжения с первого выхода, инвертирующие входы пер вых компараторов логических схем объединены и подключены к выходу источника модулирующего напряжения, а иеинвертирующие входы вторых компараторов логических схем объедине ны и подключены к выходу блоку управления. На фиг. 1 представлена структурная схема асинхронного частотно-управляемого электропривода; на фиг. 2 - структур ная схема тригонометрического анализатора; на фиг. 3 - структурная схема формирователя имдудьсов; на фиг. 4 структурная логическая схема формирователя импульсов. АсинхронньЕЙ частотног-управляемый электропривод содержит асинхронный двигатель 1 (фиг. 1), преобразователь 2 с выпрямителем 3, ЬС-фшгьтром 4 и инвертором 5. Канал 6 регулирования частоты вращения ротора содержит последовательно соединенные блок 7 задания частоты, регулятор 8 частоты, блок 9 деления, регулятор 10 активного тока и первый сумматор 11. Канап 12 регулирования модуля главного потокосцепления содержит последовательно соединенные блок 13 задания модуля, регулятор 14 потокосцепления и второй сумматор 15. Блок 16 векторных пр образованйй составлен из блоКа 17 прямого пре образования координат, блок 18 обратного преобразования координат и Евычислнтеля 19 модуля главного потокосаепления, выход которого связан с канапе 6 регулирования частоты вращения ротора, с каналом 12 регулирования модуля главного потокосцепления. Блок 20 управления преобразователя 2 частоты содержит последовательно соединенные тригонометрический анализатор 21, блок 22 фазных преобразований и формирователь 23 импульсов в цепи управления инверторсйи 5. Датчик 24 частоты вращения связан с каналом б регулирования частоты вращения ротора. Датчик 25 фазных токов соединены с входами блока 18 обратных преобразований координат через блок 26 фазных преобразоадний. Датчики Холла 27, установленные в воздущном зазоре двигателя 1, связаны с входами для гармонических функций блоков 17 и 18 прямого и обратного преобразований координат через анализатор 28 и с входами вычислителя 19 модуля главного потокосцепления. Блок 29 компенсации перекрестных связей каналов 6 и 12 регулирования соединен входами с выходами датчика 24 частотьГ вращения poTOpaj вычислителя 19 модуля главного потокосцепления и блока 18 обратного преобразования координат, а выходами - с вторыми входами первого сумматора 11 и второго сумматора 15. Выходы сумматоров 11 и 15 через блок 17 прямого преобразования координат соединены с первыми двумя входами тригонометрического анализатора 21. Канал 6 регулирования частоты вращения ротора содержит также первое апериодическое звено ЗО, первый блок 31 сравнения и первое звено 32 пропорционального преобразования, выход которого соединен с третьим первого сумматора 11. Вход пертзого апериодического звена 30 соединен с выходом блока 9 деления, а дополнительный вход первого блока 31 сравнения - с выходом блока 18 обратного преобразования координат. Канал регулирования модуля главного потокосцепления двигателя содержит также второе апериодическое звено 33, второй блок 34 сравнения и второе звено 35 пропорционального преобразования,выход которого соединен с третьим входом второго сумматора 15. Вход второго аперйошческого звена 33 соединен с выхоясм блока 13 Задания модуля, а дополнительный вход второга блока 34 сравнения - с выходом ю 1числителя 19 модуля главного потокосцепления. В цепи управления выпрямителем 3 электропривод содержит последовательно соединенные вычислитель 36 модуля яа 710пряжения статора, .третий блок 37 сравнения, регулятор 38 модуля напряжения, третий сумматор 39 и блок 40 управле ния, выход которого соединен с управляющими . входами выпрямителя 3. Входы вычислителя 36 модуля напряжения статора соединены с вь одами блока 17 прямого преобразования координат, а выход соединен также с вторым входом сум матора 39. Второй вход блока 37 сравнения соединен с выхоДом датчика 41 напряжения установленного на входе инвертора 5. Тригонометрический анализатор 21 (фиг. 2) содержит последовательно соединенные фа;зирукядий блок 42, суммирующий апериодический усилитель 43 и синусно-жосинусный генератор 44, выходы которого являются выход)ами тригонометричёского анализатора 21 и, кроме того, соединены с входами фазирующего блока 42 Суммирующий апериодический усилитель 43 снабжен дополнительным входом, поШслюченным к выходу 6noKai 7 задания частоты. Формирователь 23 импудьсов (фиг, 3 содержит источник- 45 модулирующего на пряжения, блок 46 управления и логические блоки 47-52 с выходами 53 по чйс«у вентилей инвертора 5, Каждый из логических блоков 47-52 составлен из пер вого и второго компараторов 54 и 55 (фиг, 4), подключенных выходами к логй чеекрму элементу И 56, Ней нвертирукшщй вход первого компаратора 54 (вход + ) подключен к из выходов бпока 22 фазных преобразований, инвёрт ирующий BxojEi (вход -) второго компарато ра 55 - к другому выходу блока 22 фаз ных преобразований с напряжением, сдвийутым по фазе на 120 эл, град, относи тельнб нielпpя ния с пёрвото выхода, Инвертируюоше входы (вхйды-) первых компараторов 54 логических блоков 4752 объедавены и пбдключены к вызюду источника 45 модулирующего напряже ния, Неинвертирукицие входы (входы ) вторых компараторов 55 объединены и подключены к выходу бяока 46 управления, Элекхропривод работает следующим образом, В исходном состоянии выходные сигналы блоков 7 и 13 задания равны нулю и, следовательно, равны нулю сигналы на выходе каналов 6 и 12 регулирования, датчика 24 частоты вращения ротора и датчика Холла 27, 8. . 50 Выходные сигналы триговоме трического анализатора 21 и анализатора 28 удовлетворяют соотношению (J 0 - COns4;H, следоват-ельно, или U или U,- или оба одновреме1Гно не равны нулю (синусно-коси1 сный генератор 44 имеет постоянный модуль выходной двухфазной системы напряжения). На выходах преобразователя 17 координат сигнал равен нулю. При вкдюче1ши блока 13 задания модуля главного потокосцепления сигнал на выходе сумматора 15 становится не равным нулю, и так как сигнал на хотя бы одном из выходов анализатора 28 не равен нулю, на выходе гфеобразователя17 координат появляется ненулевой сигнал, который через вычислитель 36 модуля црпряжения статора включает управляемый выпрямитель 3. Так как сигнал на хотя бы одном нз выходов тригонометрического анализатора 21 не равен нулю, то какая-либо пара тиристоров инвертора-5 оказЁосвается открытой и по обмотке двигателя 1 начинает протекать ток, создающий. магнитное поле. Сигналы с датчика Холла 27 подаются на входы анализатора 28, на твалхоре которого сигналы оказываются в фазе с входными. Эти сигналы, поступая ва вхо ° прямого преобразования коорДинат, фазируют выходы анализатора 21, а сигнал с выхода вычислителя 1@ модуля главного потокосцеплення, как сигнал обратной связи, поступает в канал 12 регулирования, В случае, если настройка контура нарущена и во время фазирования анализаторов 21 и 26 произошло переключение ключей инвертора 5, то процесс установ«ения заданного значения модуля главно потокосцепления отличается от модельного, издаваемого аперио шческим звеном 33, При этом на выходе бшжа 34 сравнения появляется сягнал рассогласования, который через звево 35 пропорШонального преобразования, имеющее весьма большой коэф оиент усиления, вводится через сумматор 15 на акод блока 17 прямого преобразования координат. Если же процесс идет согласно моделыюму, го на выходе звена 35 пропораионального преобразования сигнал равен нулю. Включение блока 7 задания приводит к проявлению сигнала на выхсще сумма тора 11, При этом фаза ш хфазного напряжения на вымде блока 17 увеличивается (уменьщается) относительно фазы двухфазного напряжения с выхода анализатора 910 28. После того как разность фаз достигнет величины 60 град, произойдет коммутация ключей инвертора 5. Дискретность срабатывания ключей инвертора 5, а также изменение параметров двигателя 1 и преобразователя 2 при водит к расстройке канала регулирования, квадратурной составляющей тока статора (канала 6). В этом случае реальный переходный процесс отличается от модель ного, определенного апериодическим звеном 30. На выходе блока 31 сравнения появляется сигнал рассогласования, который через звено 32 проп(ционального преобразования с больщим коэффициентом усиления воздействует через сумматор 11 на вход блока 17 прямого преобразования координат. Если же процесс идет согласно модельному, то на выходе звена 32 сигнал равен нулю. Устранение неуправляемости электропривода в интервалах коммутации устраняется также за счет поступления сигнала задания, пропорционального заданной (мгновенной) частоте вращения с выхода блока 7 на вход тригонометрического ана лйзатора 21 (предполагается, что программа гладка), что создает опережение при к 4мутации ключей инвертора 5, Наличие указанного сигнала на входе анализатора 21 позволяет фазирующему блоку работать только с динамическими составлякшими частоты вращения. При этом обеспечивается уменьщение статической и динамической ошибок. При коммутации ключей инвертора 5 меняется магнитное пспе в ДЁигатеяе 1, следствием чего является изменение сигналов на выходах анализаторов 28 и 21 и очередная коммутация ключей. В кон- туре регулирования напряжения зшыпрямителя 3 прик1енена опережающая связь с выхода вычислителя 36 моаупя напряжения статора на второй вход сумматс а 39, назначение которой аналогично связи с выхода блока 7 задания частоты вращения на третий взюд тригонся4ет1ячео кого анализатора 21. Следует отметить что эта связь фвксирует рабочую точку
на стаТическсЛ характеристике выпрякш- 50 управления. 0 теля и, следовательно, регулятор 38 модуля напряжения работает в окрестности этой точки, тем самым можно сказать, что подобная связь осуществляет линеаризацию системы. Двухфазная система управляющих напряжений стабильной амплитуды (с отфильтрованными вьющими гармониками) с выхода анализатора 21 поступает на вход блока 22 фазных преобразований, с выхода которого снимается шестифазная система управляющих напряжений, поступающая на входы логических блоков 4752 формирователя 23 импульсов. На выходе компаратора 54 формируются прямоугольные положительные импульсы длительностью 18О град, (при отсутствии сигнала на выходе источника 45 модулирующего сигнала). На выходе компаратора 55 формируются прямоугольные положительные импульсы, длительность кото.рых зависит от значения сигнала, поступающего с выхода блока 46 управления. На выходе элемента И 56 получают управпякшше импульсы, длительность которых зависит от величины управляющего сигнала с выхода блока 46 управления. При отсутст и управлякииего сигнала длительность импульсов на выходе элемента И 56 составляет 12О град, при максимальном пол (яки тельном сигнале 18О град., а при максимальном отрицательном - О град. Благодаря эгтху на выходе формирователя 23 импульссю (на управляю1№Х входах инвертора 5) обеспечивается управляю1Ш1й пакет импульсов, длЕВтельность которого может быть задана. Это позволяет уменьщить энергетические затраты на управление. Таким образом, в электроприводе согласно изобретению за счет введения в каналы регулирования дополнительных модельных аепей, вкпючакяовх апериодические звенья и звенья пропорквовального преобразования, обеспечивается стабильность динамических характеристик независимо от изменяющихся параметров системы, что определяет высо17ю точность
фи9.2
фаеЗ
5S 53
53 53
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТАНОВКА ДЛЯ ФИЛЬТРАЦИИ ЖИДКОСТИ | 1998 |
|
RU2144422C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
