Изобретение относится к электротехнике и может быть использовано в прецизионных гироскопических электроприводах на базе гистерезисного двигателя.
Гистерезисный двигатель характеризуется произвольным положением ротора при синхронизации относительно синхронной системы координат. Это положение может меняться с нагрузкой,Ю а также в результате изменения параметров питания, С изменением положения ротора связана ошибка гироприбора, которая имеет случайный характер и не может быть скомпенсирована. Известен способ управления гироскопическим электроприводом на базе гистерезисного двигателя, при кото ром осуществляют периодическую ресинхронизацт-по ротора путем периодического отключения питания гиродвигателя на заданное время, устраняя этим ошибку гироприбора Недостаток этого способа состоит в TOMj что каждая асинхронизация ротора сопровождается резким изменением момента по оси кинетического момента, появлением реактивных моментов на корпусе, большим из-менением тока. В результате снилсается точность гироприбора. Наиболее близким по технической сущности к изобретению является способ управления гистерезисньш двигате лам гироприбора, при котор; м формируют в фазах двигателя токн частоты питания и последовательность на.магнич вающих импульсов напряжения заданной амштитуды и длительности, осуществляя периодическую модуляцию токов в фазах Двигателя импульсами напряжени заданной амплитуды, длительности и фазы, обеспечивая при этом скольжени ротора С 2 3« Известный способ устраняет все недостатки, сохраняя при асинхрониза ции ротора энергетические характерис тики двигателя на уровне характеристик перевозбужденного синхронного режима, Недостаток известного способа состоит в -ТОМ, что не обеспечивается постоянная величина скольжения, а с-педовательно, и кинетического момен та при изменении юмeнтa нагрузки, т,е, изменяется масштабньй коэффициент в гироприборе, что снижает его точность.
Целью изобретения является уменьшение ошибки гироприбора путем повышения стабильности его кинетического момента.
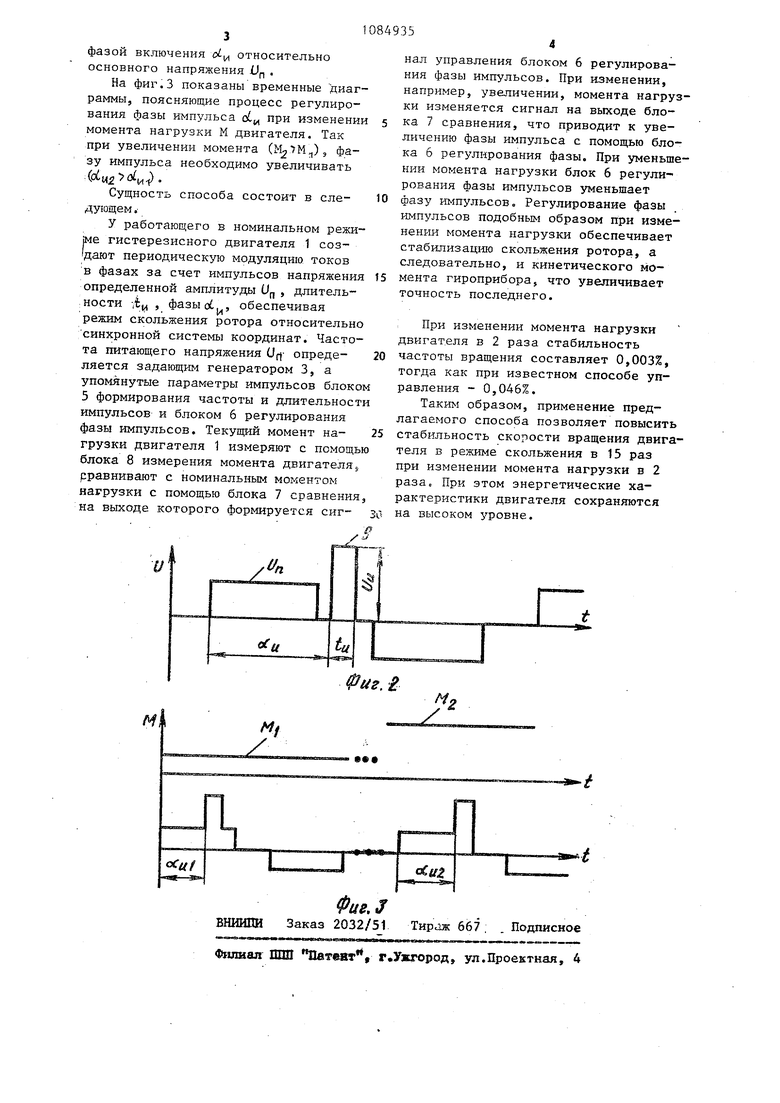
Поставленная цель достигается тем, что согласно способу управления гистерезисным двигателем гироприбора, при котором формируют в фазах двигателя токи частоты питания и последовательность намагничивающих импульсов напряжения заданной амплитуды и длительности, осуществляя периодическую модуляцию токов в фазах двигателя, обеспечивая при этом скольжение ротора, дополнительно измеряют момент нагрузки двигателя, сравнивают указанный момент с заданньк номинальным моментом, а фазу указанных намагничиваюш 1х импульсов напряжения изменяют в соответствии с величиной и знаком изменения момента нагрузки. Изменение момента.нагрузки определяют, например, по изменению потребляемого двигателем тока, На фиг.Т представлен пример выполн зния устройства, реализующего способ/ на фиг. 2 и 3 - временные диаграммы, поясняющие сущность способа. В устройстве (фиг.) гистерезисный двигатель 1 подключен к инвертору 2 напряжения, цепь управления 1 оторого содержит последовательно включенные задающий генератор 3 и распределитель А импульсов. Параметры импульсов задаются при помощи блока 5 формирования частоты следования и длительности импульсов, выход которого подключен к инвертору 2 напряжения и последовательно соединенным с ним блоком 6 регулирования фазы импульсов. Управляющий сигнал на последний поступает с блока 7 сравнения, который подключен к блоку 8 измерения момента двигателя. В блоке 7 сравнения происходит сравнение текущего момента нагрузки двигателя с номинальным моментом нагрузки и вырабатывается сигнал управления фазой импульсов в соответствии со знаком и величиной изменения момента двигателя. На фиг,2 приведены временные диаграммы напряжения питания гистерезисного двигателя. Здесь на основное напряжение питания U наложен импульс 9 напряжения, характеризующийся амплитудой ,Uf| длительностью с,-и
фазой включения о, относительно основного напряжения 1) ,
На фиг.З показаны временные диаграммы, поясняющие процесс регулирования фазы импульса оС при изменении момента нагрузки М двигателя. Так при увеличении момента ,,), фазу импульса необходимо увеличивать :(dn-i oi.f ,
Сущность способа состоит в еледующем .
У работающего в номинальном режи|Ме гистерезисного двигателя 1 создают периодическую модуляцию токов в фазах за счет импульсов напряжения определенной амплитуды U , длительности :i , фазыоб,,, обеспечивая режим скольжения ротора относительно синхронной системы координат. Частота питающего напряжения Off- определяется задающим генератором 3, а упомянутые параметры импульсов блока 5 формирования частоты и длительност импульсов и блоком 6 регулирования фазы импульсов. Текущий момент нагрузки двигателя 1 измеряют с помощь блока 8 измерения момента двигателяs рравнивают с номинальным моментом нагрузки с помощью блока 7 сравнения на выходе которого формируется сигнал управления блоком 6 регулирования фазы импульсов. При изменении, например, увеличении, момента нагрузки изменяется сигнал на выходе блока 7 сравнения, что приводит к увеличению фазы импульса с помощью блока 6 регулирования фазы. При уменьшении момента нагрузки блок 6 регулирования фазы импульсов уменьшает фазу импульсов. Регулирование фазы импульсов подобным образом при изменении момента нагрузки обеспечивает стабилизацию скольжения ротора, а следовательно, и кинетического момента гироприбора, что увеличивает точность последнего.
При изменении момента нагрузки двигателя в 2 раза стабильность частоты вращения составляет 0,003%, тогда как при известном способе управления - 0,046%.
Таким образом, применение предлагаемого способа позволяет повысить стабильность скорости вращения двигателя в режиме скольжения в 15 раз при изменении момента нагрузки в 2 раза. При этом энергетические характеристики двигателя сохраняются на высоком 5фовне.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гистерезисный электропривод ротора гироскопа | 1972 |
|
SU534015A1 |
| Способ пуска гистерезисного электродвигателя | 1980 |
|
SU997214A1 |
| Способ управления гистерезисным электродвигателем | 1980 |
|
SU974539A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| Способ контроля входа в синхронизм гистерезисного электродвигателя | 1983 |
|
SU1162013A1 |
| Способ синхронизации группы гистерезисных двигателей | 1984 |
|
SU1241390A1 |
| Способ управления гистерезисным электродвигателем | 1981 |
|
SU1008876A1 |
| Способ управления гистерезисным электродвигателем | 1984 |
|
SU1272457A1 |
| Частотно-регулируемый электропривод | 1983 |
|
SU1112522A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ГИСТЕРЕЗИСНЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2361354C2 |
СПОСОБ УПРАВЛЕНИЯ ГИСТЕРЕЗИСНЫМ ДВИГАТЕЛЕМ ГИРОПРИБОРА, при котором формируют в фазах двигателя токи частоты питания и последовательность намагничивающих импульсов напряжения заданной амплитуды и длительности, осуществляя периодическую модуляцию токов в фазах двигателя, обеспечивая при этом скольжение ротора, отличающийся тем, что, с целью уменьшения ошибки гироприбора путем повьшения стабильности его кинетического момента, дополнительно измеряют момент нагрузки двигателя, сравнивают указанный момент .с заданным номинальным моментом, а фазу указанных намагничивающих имi пульсов напряжения изменяют в соответствии с величиной и знаком изме(Л нения момента нагрузки.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прерывистая подача питания уменьшает дрейф, гироприборов | |||
| Aviation Week and Space Technology, 1962, vol | |||
| Спускная труба при плотине | 0 |
|
SU77A1 |
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гистерезисный электропривод ротора гироскопа | 1972 |
|
SU534015A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
