1
Изобретение относится к области электротехники, а именно к электромеханическим устройствам гироприборов.
Известно, что гистерезисный привод, в том числе и привод ротора гироскопа, обладает низкими естественными энергетическими характеристиками, которые резко и неоднозначно изменяются при колебаниях параметров питания или момента нагрузки.
Кроме того, для гистерезисного двигателя характерна неоднозначность (случайность) положения результирующего вектора вибрации и вектора магнитного поля рассеяния относительно синхронной системы координат от запуска к запуску, что при использовании его в гироприборах уменьшает точность последних в специфичных условиях эксплуатации.
Известно техническое решение направленное на преодоление этого недостатка. Оно соетоит в том, что производят периодическое отключение или переброс фаз питания электродвигателя, асинхронизируя его. При этом энергетические характеристики двигателя не повышаются.
Использованием перевозбуждения, например, путем уменьшения напряжения в синхронном режиме достигается повышение энергетических характеристик. Однако сохраняется вероятность развозбуждения двигателя и,
как следствие, резкое увеличение тока и мощности. Одновременно использование режима перевозбуждения приводит, как правило, к увеличению качаний ротора, т. е. к нестабильности мгновенной скорости.
Для исключения развозбуждения в электропривод введен генератор импульсов с цепью синхронизации, который на каждую полуволну напряжения питания двигателя накладывают намагничивающий импульс. Это приводит к увеличению потерь на намагничивание и не рещает задачу стабилизации всех характеристик привода.
Цель изобретения - достижение стабильности характеристик электропривода с одновременным повышением его энергетических показателей. Эта цель достигается тем, что цепь синхронизации генератора импульсов дополнительно содержит делитель частоты питания электродвигателя.
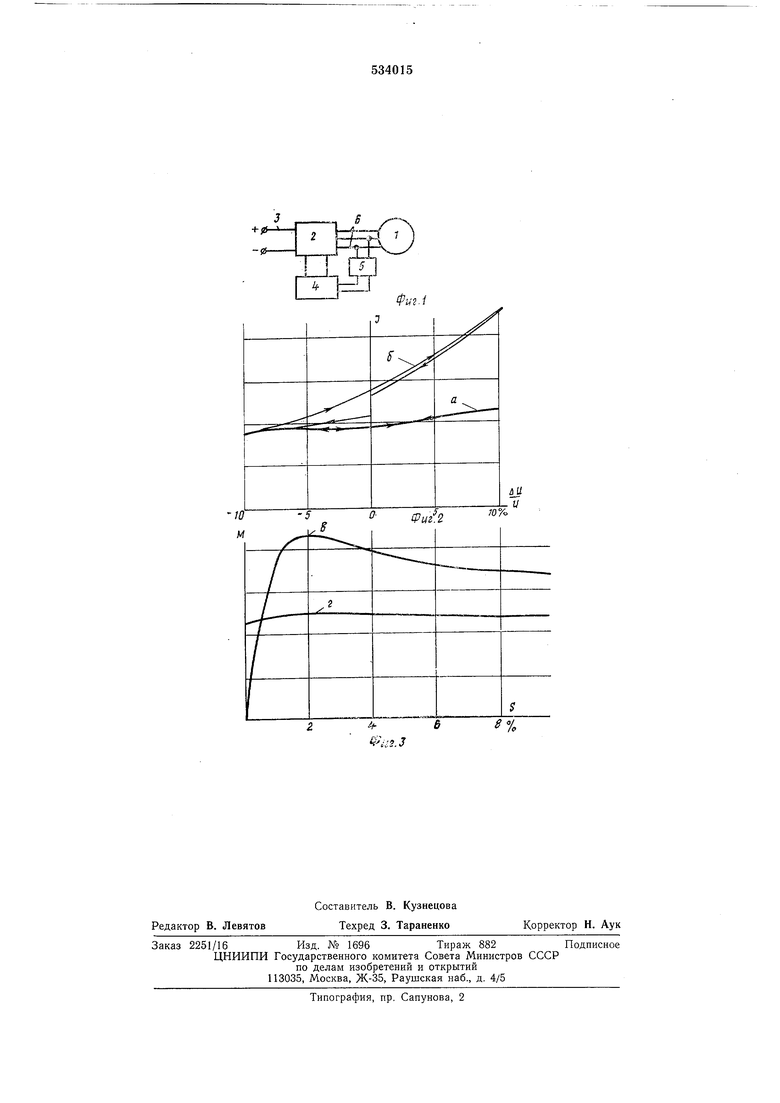
На фиг. 1 показана структурная схема электропривода; на фиг. 2 - нестабильные характеристики гистерезисного двигателя с подмагничивающим и без подмагничивающего импульса; на фиг. 3 - механическая характеристика в области малых скольжений асинхронизированного гистерезисного электродвигателя в предлагаемом электроприводе.
Гистерезисный двигатель 1 подключен через источник питания - преобразователь 2 -
к цепи постоянного тока 3. К преобразователю 2 подключен генератор импульсов 4, синхронизированный от делителя частоты 5, соединенного с цепью переменного тока 6 преобразователя 2. Выход генератора импульсов 4 может быть также подключен по другому, например последовательно или параллельно фазным обмоткам гиродвигателя, что не является принципиальным для существа изобретения. Важно лишь то обстоятельство, чтобы характер включения выхода генератора не ограничивал возможность регулировки в нем фазы импульсов по отношению к питающему двигатель напряжению.
После включения электропривода на двигатель 1 поступает многофазное напряжение любой известной формы с наложением на него прямоугольными импульсами напряжения, следующими друг за другом через несколько периодов частоты основного питания.
Существо эффекта устранения качаний ротора, стабилизации тока и асинхронизации привода при одновременном достижении высоких характеристик состоит в следующем.
Каждый предельно кратковременный импульс тока, прикладываемый в одной (или нескольких) фазной обмотке статора стремится намагнитить ротор по геометрической оси данной обмотки (нескольких обмоток). Пусть остаточная намагниченность ротора, имеющая место до каждого последующего импульса, совпадает по направлению с осью намагничивания. Тогда каждое последующее намагничивание лищь подтверждает предыдущее намагничивание. Рабочие и угловая характеристика электродвигателя после каждого импульса неизменны. Если между предыдущим и последующим намагничивающими импульсами произошло увеличение момента нагрузки, то увеличился угол выбега ротора по отнощению к намагничивающей силе статора. Теперь уже последующий намагничивающий импульс произойдет до совпадения остаточной намагниченности от предыдущего импульса с осью намагничивающей обмотки. Поэтому последующая результирующая намагниченность сдвинется по ротору в сторону опережения предыдущей намагниченности, но одновременно под влиянием остаточной намагниченности отстанет от н. с. статора. Момент электродвигателя увеличится, наступит новое равновесное состояние.
В результате наличия дискретного переноса намагниченности относительно тела ротора при наличии импульсов угол выбега ротора при возрастании момента увеличивается больще, а при уменьщении момента уменьщается меньше, чем при отсутствии импульсов. Образуется существенный гистерезис в угловой характеристике электродвигателя, который и является причиной эффективного демпфирования качаний.
При изменении нап|ряжения в обычном гистерезисном электроприводе с перевозбуждением значительно изменяется реактивная составляющая тока, так как намагниченность ротора сохраняется неизменной. В этом электроприводе с изменением основного напряжения питания аналогично изменяется амплитуда намагничивающих импульсов, в результате чего напряжение и э. д. с. электродвигателя примерно пропорциональны, и ток поддерживается приблизительно на постоянном уровне. На фиг. 2, а, б показаны характеристики тока / соответственно с наличием и без намагничивающих импульсов в функции относила/тельного изменения напряжения .
Причиной гистерезиса тока, а следовательно, и мощности в известном гистерезисном приводе является гистерезис намагниченности ротора, возникающий от цикличного изменения напряжения. Поскольку в данном приводе намагниченность ротора определяется лишь
намагничивающими импульсами и не имеет гистерезиса при изменении их амплитуды, а также не зависит от изменения основного напряжения, то, следовательно, в нем нет и гистерезиса тока (сравним кривые а и б на
фиг. 2).
Вместе с тем в гистерезисном приводе положение тела ротора по отношению к н. с. статора в каждом запуске безразлично. Это означает, что в каждом запуске фазы собственных вибраций опор ротора неопределенны. Поэтому результирующая вибрация от нескольких гидр о двигателей на гироплатформе меняет свою величину от запуска к запуску. Это затрудняет компенсацию вредных моментов, ею создаваемых.
Для устранения этого последнего недостатка необходимо асинхронизировать электропривод, заставив фазы вибраций периодически изменяться на 360°. Однако при этом желательно сохранить скорость гиродвигателя стабильной. Оказывается, что целесообразно изменить фазу намагничивающего импульса. Пусть, например, она повернута в сторону опережения. Тогда сразу после импульсного
намагничивания момент электродвигателя уменьшится и далее до следующего импульса под влиянием момента нагрузки будет увеличиваться, чтобы уравнять средний момент электродвигателя с моментом нагрузки. Если
до последующего импульса средний момент двигателя не достигнет момента нагрузки, то электродвигатель перейдет в асинхронный режим. По мере увеличения скольжения намагниченность ротора от предыдущего импульса
к моменту последующего импульса все более поворачивается в сторону отставания. Одновременно в ту же сторону поворачивается после последующего импульса и результирующая намагниченность. Скольжение увеличивается
до тех пор, пока момент электродвигателя не сравняется с нагрузкой.
Это справедливо для сдвига фазы намагничивающего импульса и в сторону отставания. При этом ротор начнет скользить, опережая
синхронную скорость.
Достаточно ничтожного скольжения, чтобы ось намагниченности от предыдущего имнульса повернулась на значительный угол к моменту возникновения последующего импульса. В результате этого механическая характеристика b на фиг. 3 имеет очень высокую крутизну в функции скольжения 5. Так же на фиг. 3 для сравнения показана механическая характеристика г того же гистерезисного привода без асинхронизирующих намагничивающих импульсов.
Несмотря на то, что предлагаемый привод асннхронизирован, он имеет высокие энергетические характеристики, свойственные перевозбужденному гистерезисному двигателю.
Частота намагничивающих импульсов должна быть примерно в 5-10 раз выще собственной частоты колебаний гиродвигателя и должна составлять 0,01-0,1 от частоты основного питания, их длительность должна быть меньше 1/6 периода основного питания, отношение амплитуды импульса к амплитуде напряжения основного питания - обычно около 2.
Изобретение может быть использовано в гироприборах с допустимой нестабильностью кинетического момента до 0,01%. Оно позволит уменьшить энергопотребление и нагрев
гироприводов при одновременном устранении нестабильности тока, мощности и момента его главной оси.
Изобретение применимо для случая работы нескольких гироприборов от единого преобразователя.
Формула изобретения
Гистерезисный электропривод ротора гироскопа, содержащий гистерезисный электродвигатель и генератор перевозбуждающих его импзльсов с цепью синхронизации, отличающийся тем, что, с целью стабилизации характеристики электродвигателя при одновременном сокращении энергопотребления, цепь синхронизации генератора перевозбуждающих импульсов дополнительно содержит делитель частоты питания электродвигателя.
THrtzj/A Pr
J m
-«--1 Ч-т IzzLJ
./
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1981 |
|
SU966838A1 |
| Электропривод гироскопов в составе гироплатформы | 1990 |
|
SU1810758A1 |
| Гистерезисный электропривод ротора гироскопа | 1980 |
|
SU936334A2 |
| Способ управления гистерезисным двигателем гироприбора | 1981 |
|
SU1084935A1 |
| Гистерезисный электродвигатель | 1977 |
|
SU748695A1 |
| Электропривод с гистерезисным электродвигателем | 1972 |
|
SU530407A1 |
| Электропривод гироскопа | 1990 |
|
SU1810757A1 |
| Устройство для управления гистерезисным электродвигателем | 1981 |
|
SU974540A1 |
| Способ управления гистерезисным электродвигателем | 1984 |
|
SU1272457A1 |
| Статический преобразователь с блоком импульсного перевозбуждения для питания гистерезисного гиродвигателя | 1981 |
|
SU989729A1 |
ii/ У
;07o
cPui.Z
8%
ii-ё
a.J
