СХ) 00
о N 4
Изобретение относится к автомати ке и вычислительной технике и может быть использовано для преобразования угла поворота вала в код в устройствах ввода информации в ЦВМ.
По основному авт.св. № 691909 известен преобразователь угла поворота вала в код, содержащий синусно-косинусный датчик угла, выходы которого со« динены с первыми входами блоков умножения, выходы которых подключены к входам блока вычитания, выход которого соединен с первым входом компаратора, выход которого подключен к одному из входов реверсивного счетчика, который через блок синусно-косинусного преобразования кода подключен к вторым входам блоков умножения, блок преобразования амплитуды в последовательный код, выход блока вычитания подключен к входу блока преобразования амплитуды напряжения в последовательный код выход которого соединен со счетным входом реверсивного счетчика, а второй вход компаратора соединён с общей шиной СI 3.
Недостатком известного преобразог вателя являются значительные погрешности при изменении угла поворота вала с большими угловыми скоростями и ускорениями.
Целью изобретения является повышение динамической точности преобразователя.
Поставленная цель достигается тем что в преобразователь угла поворота вала в код введены третий и четвертый блоки умножения, второй блок вычитания, второй блок синусно-косинус ного преобразования кода, второй блок преобразования амплитуды напряжения в последовательный код, второй реверсивный счетчик и сумматор, выходы синусно-косинусного датчика угла подключены к одним входам третьего и четвертого блоков умножения соответственно, выходы которых через второй блок вычитания подключены к входу второго блока преобразования амплитуды напряжения в последовательный код, выход второго блока преобразования амплитуды напряжения в последовательный код подключен,к входу второго реверсивного счетчика ,в ход второго реверсивного счетчика подключен к одному входу сумматора , друго вход которого соединен с выходом
первого реверсивного счетчика, а выход сумматора через второй блок синусно-косинусного преобразования ког да подключен к другим входам третьег го и четвертого блоков умножения.
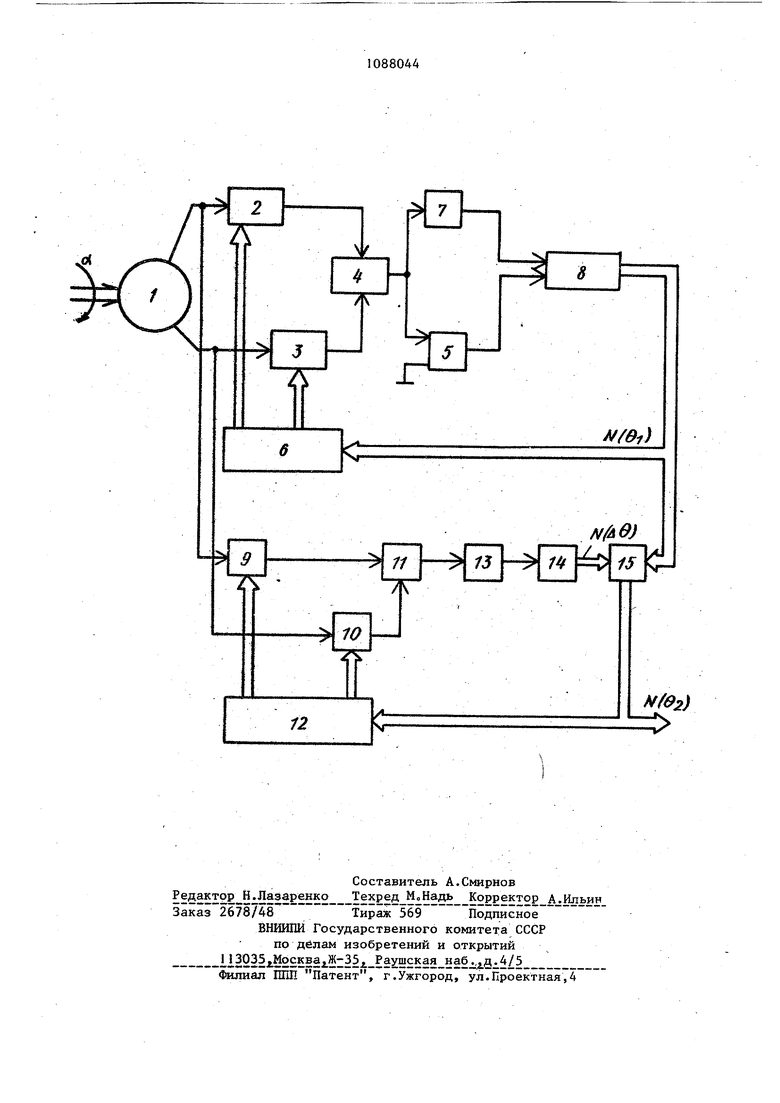
На чертеже приведена блок-схема преобразователя.
Преобразователь содержит синуснокосинусный датчик 1 угла, выходы которого подключены к одним входам блоков 2 и 3 умножения, выходы которых через блок 4 вычитания подключены к одному входу компаратора 5, другой вход компаратора 5 соединен с общей шиной. Выходы блока 6 синуснокосинусного преобразования кода подключены к другим входам блоков 2 и 3. Вькод блока 3 вычитания через блок .7 преобразования амплитуды напряжения в последовательный код подключен к счетному входу реверсивного счетчика 8, управляющий, вход которого соединен с выходом компаратора 5, а выход - с входом блока 6.
Выходы синусно-косинусного датчиг ка 1 угла подключены к одним входам третьего и четвертого блоков 9 и 10 умножения, выходы которых подключены к блоку II вычитания.
Выходы блока 12 синусно-косинусного преобразования кода подключены к другим входам блоков 9 и 10. Вы- , ход блока 11 вычитания через блок 13 преобразования амплитуды напряжения в последовательный код подключен к входу реверсивного счетчика 14, а выходы реверсивных счетчиков 8 и 14. подключены к сумматору 15, выход кот торого подключен к входу блока 12. Преобразователь работает следующим образом.
Синусно-косинусный датчик 1 угла вырабатывает на выходе два напряжения: Up(t| V cosetsinwt ;
5 Чл5 5 . где - угол поворота вала СКДУ 1;
to - частота возбуждения СКДУ 1. Напряжения Ug(t) и Uj(t) проходят через блок( 2 и 3 умножения, коэффициенты которых устанавливаются кодами, поступакнцими с блока 6, пропорциональными синусу и косинусу выходного кода 8 счетчика. Напряжения на входе блока 4 имеют вид
и,, (t)V.. cosot N.sin «jyt;
М1
и j (t).V Si not COS N 5i n W t. Блок 4 суммирует напряжения Ujj(t) и ) с изменением знака одного из них. Напряжение на выходе блока Цф(( преобразуется в частоту импульсов блоком 7, а компаратор 5 выделяет знак напряжения U(t). Поступая на счетчик 8, выходные импульсы блока 7 из меняют его код N, сводя рассогласова -г ние оС. -Ь-,между углом оС и его кодовым эквивалентом N-к нулю. В установившемся состоянии ot N, т.е. достигается соответствие кода N входному углу , Аналогичным образом работает корректирующая следящая система, образованная блоками 1,. 9 15, с тем отличием, что на входы блока 12 поступает с выхода сумматора 15 код, равный сумме кодов реверсивных счетчиков 8 и 14 Nj-fN +dN. Ё установившемся состоянии ct N,Nj.. При вращении вала датчика I с постоянной скоростью ,5 основная систег ма, образованная блоками 1 - .8, прео бразует угол d. в код Л с ошибкой, пррпор1 1ионапьной скорости входного вала (ошибка слежения ) . -t где KQ - коэффициент усиления разомкнутого контура основной системы. Режим слежения корректирующей сис темы также обеспечивается блоком 7 основной системы за счет ввода кода с угловым эквивалентом 1ч- оС-ЛКд в сумматор 15. Напряжение рассогласова ния на выходе блока И Uj{t)sU Stn/lN S hU)i . изменяет код счетчика 14 таким образом, чтобы свести напряжение рассогг ласования Jg-K нулю, что достигается при коделН |Ъв счетчике 14. При этом ошибка преобразователя равна нулю, а код сумматора 15 точно соответствует угловому положению вала. Такой преобразователь не имеет динамической ошибки при движении вала с постоянной скоростью. При более сложном движении вала датчика 1, например по закону o6(t)s динамическая ошибка такого преобразователя имеет постоянную величину .т.е. обратно пропорциональна произве дению коэффициентов усиления основной Kjj и корректирующей К., электронных следящих систем. При движении вала t: постоянным ускорением Л ошибка известного .зовдтеля V 08(ttT). растет пропорционально времени с достаточно большой скоростью и уже через 1 с после начала движения дост тигает 108 угл. с при К . Погрешность предлагаемого преобразователя в таком режиме неизменна во времени и при Kj, К 1000 1/с не превышает (Т, I угл.с. Таким образом, предлагаемый преобразователь имеет существенно большую точность преобразования в код изменяющегося во времени угловог го положения вала.

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1981 |
|
SU980112A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU955151A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1088045A1 |
| Преобразователь угла поворота вала в код | 1981 |
|
SU1148574A3 |
| Многоканальный преобразователь аналоговой величины в код | 1981 |
|
SU991468A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2003 |
|
RU2240650C1 |
| Фазовая следящая система | 1981 |
|
SU954926A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2004 |
|
RU2270519C1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU691909A1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1633492A1 |
ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД по авт. св. (Р 691909, о тли ч ающий ся .тем, что, с целью повьшения динамической точности преобразователя, в него введены третий и четвёртый блоки умно- , жения, второй блок вычитания, второй блок синусно-косинусного преобразования кода, второй блок преобразования .амплитуды напряжения в последовательный код, второй ревёрсивный счетчик и сумматор, выходы синуснокосинусного датчика угла подключены к одним входам третьего и четвертого блоков умножения соответственно, выходы которых ч€рез второй блок вычитания подключены к входу второго блока преобразования амплитуды напряжения в последовательный код, вы ход второго блока прсеобразования амплитуды напряжения в послёдрвательнь1й код подключен к входу второго реверсивного счетчика, выход второго реверсивного счетчика подключен к одному входу сумматора, другой вход которого соединен с выходом первого реверсивного счетчика, а выход сумСП матора через второй блок синуснокосинусного преобразования кода подс ключен к другим входам третьего и четвертого блоков умножения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU691909A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
