Изобретение относится к автоматике и вычислительной технике и может быть использовано для преобразования углов поворота объектов в двоичный код.
Известен многоканальный преобразователь угла поворота вала в код, содержащий синусно-косинусные вращакшщеся трансформаторы, объединеншле в группы, генератор тактовых импульсов, фазовый детектор нижних частот,.управляемый генератор, счетчик, вентили, регистр памяти, формирователь строб-импульса Cl.
Недостатком этого преобразователя является значительная динамическая ошибка при увеличении числа каналов и скоростей вращения датчиков .
Известен также преобразователь, содержащий синусно-косинусный датчик угла, выходы которого соединены с первыми входами блоков умножения, выходы блоков умножения подключены к входам блока вычитания, выход которого подключен к входу компаратора и входу блока преобразования с1мплитуды напряжения в последовательный код, выход которого подключен к.счетному входу реверсивного
счетчика, выходы разрядов реверсивного счетчика через блок синусно-ко,синусного преобразования кода подключены к вторым входам блоков умножения С2 .
Недостатком данного преобразователя является динамическая ошибка при использовании его для многока- . нального преобразования, поскольку
10 отслеживание рассогласования начинается с некоторой произвольной величины этого рассогласования, которое остается от предыдущего канала.
Наиболее близким техническим ре15шением к изобретению является многоканальный преобразователь аналоговой величины в код, содержащий источники информации, подключенные через коммутатор к первому входу
20 блока преобразования аналоговой величины в код, выход которого подключен к блоку па1«1яти, блок управления, один выход которого подключен к управляющим входам коммутато25ра и блока памяти, а другой выход к второму входу блока преобразования аналоговой величины в код СЗ .
Недостатком известного преобразователя является динамическсш пог30решность, в особенности при испольэовании в качестве блока преобразования аналоговой величины в код прв .образователей следящего уравновешивания.
Целью изобретения является повышение динамической точности многоканального преобразователя, Поставленная цель достигается тем, что в многоканальном преобразователе аналоговой величины в код, содержащем источники информации, подключенные через коммутатор к первому входу блока преобразования аналоговой величины в код, выход которого подключен к блоку памяти, блок управления, один выход которого подключен к управляющим входам коммутатора и блока памяти, а другой выход - к второму входу блока преобразования аналоговой величины в код, выход блока памяти подключен к третьему входу блока преобразования аналоговой величины в код.
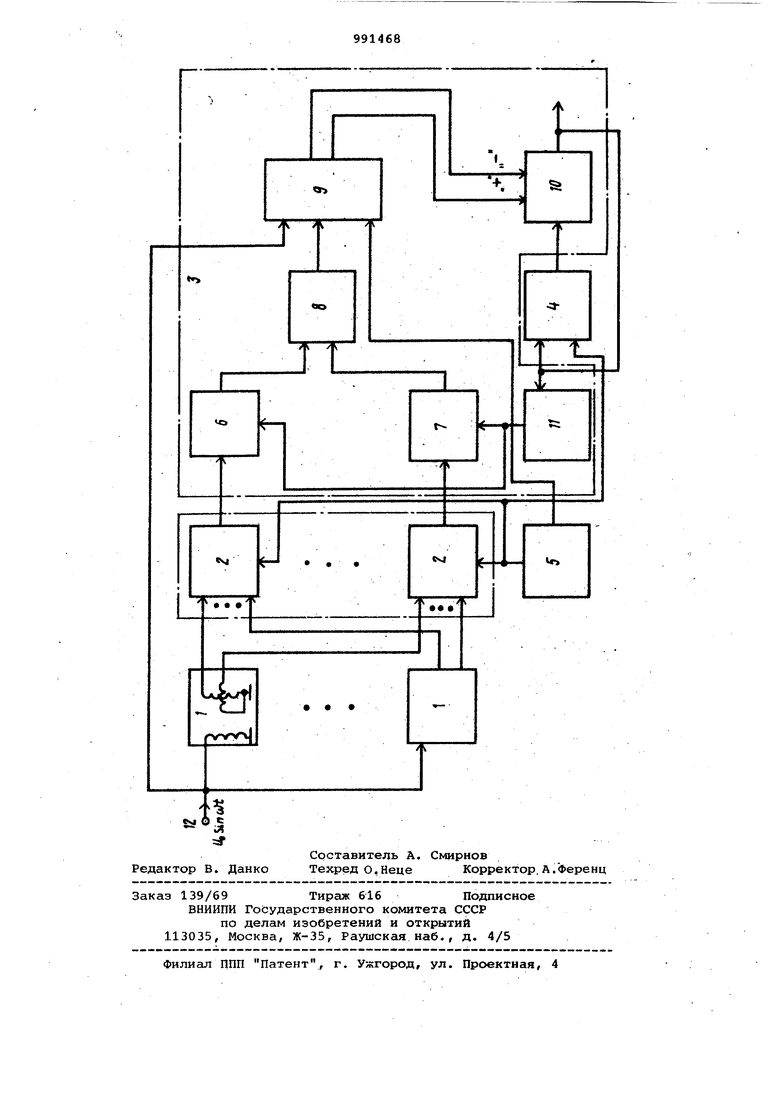
На чертеже приведена структурнаясхема преобразователя.
Преобразователь содержит источники информации - синусно-косинусные датчики 1 угла, выходы которых через коммутаторы 2 подключены к первому входу блока 3 преобразования выходных сигналов сииусно-косинусных датчиков 1 в код. Выход блока 3 подключен к блоку 4 памяти. Один выход блока 5 управления подключен к управляющим входам коммутатора 2 и блока 4 памяти, .другой выход - к второму входу блока 3, а выход блока 4 памяти - к третьему входу блока 3. Блок 3 преобразования выходных сигналов синусно-косинусных датчиков в код состоит из моуляторов 6 и 7, одни входы которых соединены с выходами коммутатора 2, а выходы через сумматор 8 подключены к формирователю 9 двух последовательностей импульсов из выходного напряжения сумматора 8. Выходы формирователя 9 подключены к входам. сложения и вычитания реверсивного счетчика 10, выходы разрядов которого подключены к блоку 4 памяти и блоку 11 преобразования кода счетчика в коды синуса и косинуса. Выходы блока 11 подключены к другим входам одуляторов 6 и 7. Выход блока 4 &мяти подключен к установочным Bjfpам реверсивного счетчика 10. Другой выход блока 5 управления подключен к второму входу формироватея 9 , третий вход которого соединен с источником 12 опорного напряжения.
Преобразователь работает следуюим образом.
Импульс с первого выхода блока 5 управления одновременно с подклюением синусных и косинусных обмоток выбранного датчика 1 к входам
модуляторов 6 и 7 выбирает нужный адрес соответствующего кода угла поворота, хранящегося в блоке 4 после предыдущего измерения с этим же датчиком, и записывает код угла
поворота в реверсивный счетчик 10.
Напряжение с синусной обмотки датчика 1 умножается модулятором 6 на цифровой код, подаваекий с косинусного выхода блока 11, а напряжение с косинусной обмотки датчика 1 умножается модулятором 7 на код синусного выхода блока 11. На выходах модуляторов 6 и 7 образуются сигналы
и KUoSin UJ t sinot . cos N, U KUjjSinuJt - cos06 - sin N,
где DO sin a t - напряжение источника 12;
К - коэффициент трансформации датчика 1;
0 - угол поворота датчика 1;
N - текущий код реверсивного счетчика 10.
На выходе сумматора 8 образуется разность dN сигналов К и Ug ли KUosin U) t - sin (ot - N) .
Формирователь 9 анализирует фаЗУ напряжения ли по отношению к напряжению возбуждения и сравнивает напряжение dU с пороговым напряжением, при превышении которого формирователь 9 пропускает импульсы
с второго выхода блока 5 управления на вход сложения или вычитания реверсивного счетчика 10, уменьшая напряжение ли рассогласования между углом ot и кодом N. После окончания преобразования, когда oi N, код N из реверсивного счетчика 10 записывается в блок 4 памяти по этому же адресу.
При поступлении очередного импульса с первого выхода блока 5 управления подключается очередной датчик 1, выбирается соответствующий ему код из блока 4 и записывается в реверсивный счетчик 10. В дальнейшем работа преобразователя аналогична указанной.
Таким образом, преобразователь отрабатывает начальные рассогласования между углами поворотов каждого из датчиков и в дальнейшем только следит за приращениями углов
поворота каждого датчика относительно кодов, установленных в блоке 4 памяти, что значительно сокращает время преобразования и уменьшает
динамическую ошибку.
В общем случае датчики 1 могут быть источниками любой ангшоговой .информации (скорость,, температура, давление и т.д.), а в качестве
/блока 3 может быть использован любой известный блок преобразования напряжеиия, фазы, и т.п. в код следящего уравновешиваиия.
Формула изобретения
Нногокаисшьный преобразователь ангшоговой величины, в код, содёржгш источники информации, подключенные I через коммутатор к первому входу блока преобразования аналоговой величины в код, которого подюшчен к блоку памяти, блок управления, один выход которого подключен к управляшцим входам коммутатора и блока памяти, а другой выход к второму входу блока преобразовав
ния аналоговой величины в код, отличающийся тем, что с целью повышения динамической точности многоканального преобразователи, выход блока памяти подключен к третьему входу блока преобразовав ния аналоговой величины в код.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 461435, кл. G 08 С 9/04, 1974.
2.Авторское свидетельство СССР №691909, кл. G 08 С 9/00., 1977.
3.Шмид Г. Устройство и принцип действия преобразователей аналогкод. Перевод ГОНТИ 1 4211(71), 1971, с. 176, рис. Ш.13 (прототип),
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный преобразователь перемещения в код | 1985 |
|
SU1275751A1 |
| Многоканальный преобразователь перемещения в код | 1987 |
|
SU1495994A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1478332A1 |
| Устройство для формирования сигнала рассогласования | 1985 |
|
SU1317394A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308148C1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1197080A1 |
| Устройство для синусно-косинусного цифроаналогового преобразования | 1983 |
|
SU1278897A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |
1U
«SI
%
«st
.
