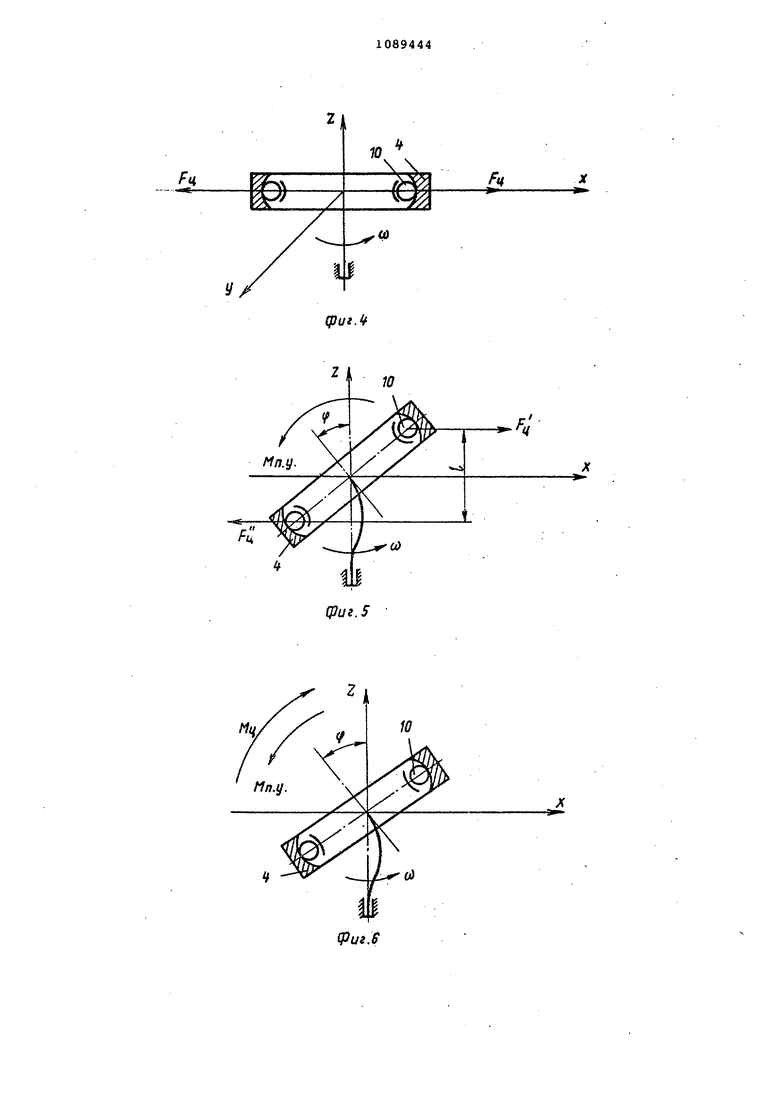
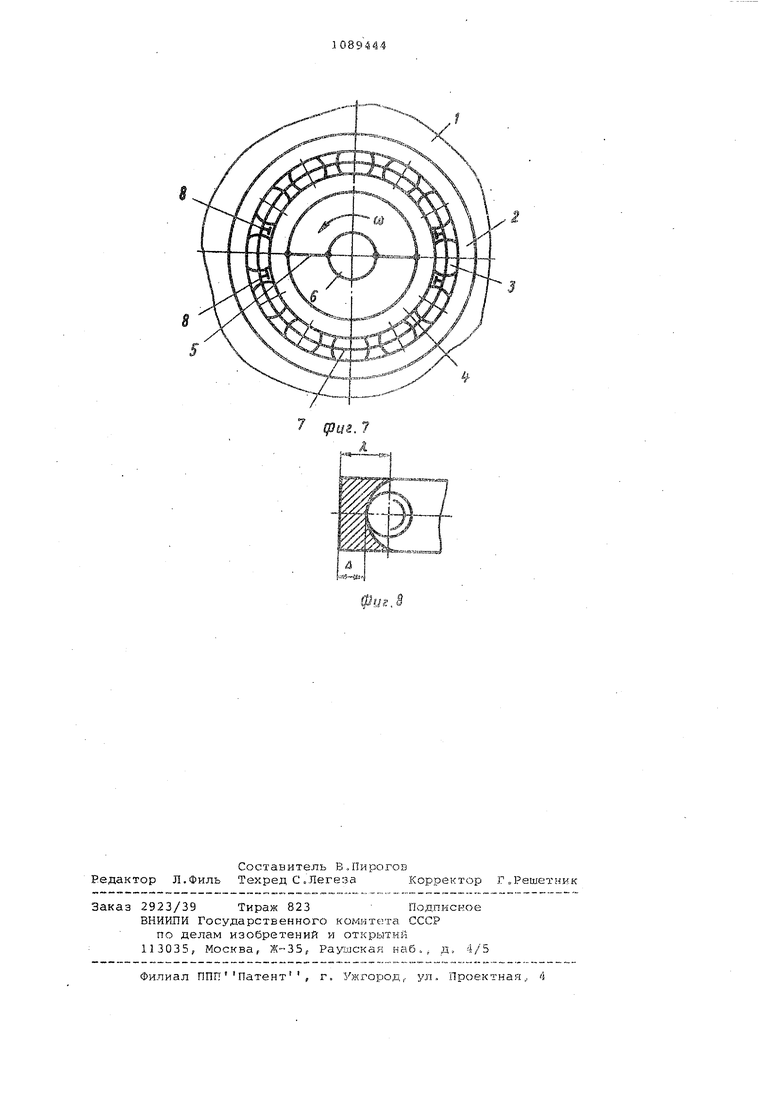
Изобретение относится к вибрацио .ной технике и может быть использова но для испытаний блоков радиоэлектронной аппаратуры больших габаритов и веса на вибропрочность и виброустойчивость в широком частотном диапазоне на мощных электродинамически вибраторах. По основному авт. св. № 466417 известен электродинамический вибратор, содержащий магнитопровод, катушку подмагничивания, звуковую катушку, стол для крепления испытуемых изделий, жестко соединенный со звуковой катушкой штоком, подвешенным .на упругих элементах, систему центрирования в виде двух разнесенных и повернутых один относительно другого на угол 45° аэростатических подшипников ij . Однако система центрирования што ка (или, что то же самое, стола) вибратора позволяет эффективно пода лять паразитные угловые колебаний штока в сравнительно небольшом частотном диапазоне и только на вибрат рах малой мощности. В случае испытания необходимо проводить в ши роком диапазоне (от О до 4000, иног да. 5000 Га) на мощных вибраторах, на столах которых устанавливаются испытуемые блоки больших габаритов веса (например, 50 кг), являгощиеся сложными колебательными системами с неравномерно распределенными параметрами, значительно усиливаются и без того большие по величине паразитные угловь е колебения стола (штока),жесткости воздушного зазора для устранения этих паразитныхугло вых колебаний оказывается недостато но. В результате этого не удается п лучить заданную точность воспроизве дения колебаний и, следовательно, виброиспытаний. Исследования показы вают, что на мощных электродинамических вибраторах в некоторых частотных поддиапазонах паразитные угловые колебания могут достигать 300 и более от уровня основных рабочих колебаний в осевом направлении. Цель изобретения - повьадекие точ ности воспроизведения колебаний путе.м устранения паразитных угловых к лебаний . Поставленная цель достигается те что в электродинамический вибратор дополнительно введен гироскоп в виде электродвигателя с насаженным на вал маховиком, в ступице которого радиально и равномерно по окружности закреплены одинаковые отрезки тросов, на втором конце которых закреплены шаровые обоймы с помещен ныит в них с возможнаётью свободного вращения шарами, при этом шток и стол выполнены , гироскоп уст новлен соосно в образованной общей полости, а на внутренней цилиндрической поверхности выполнена дорожка качения, в которую пог-.ещены шары. На фиг. 1 схематично показан электродинамический вибратор, продольный разрез; на фиг. 2 - сечение Л-А на фиг. 1; на фиг. 3 - сечение Б-В на фиг. 1; на фиг. 4 - система центрирования стола вибратора и направление центробежных сил инерции в случае отсутствия, паразитных угловых колебаний; на фиг. 5 - то же, в случае наличия паразитньох угловых колебаний; на фиг. 6 - то же, с заменой на схеме сил инерции на центрирующие моменты инерции; на фиг. 7 - реальное технологическое исполнение системы центрирования в виде шарикоподшипника; на фиг. 8 - канавка с расположенным в ней стальным шаром, поперечный разрез. Электродинамический вибратор со.цержит магнитопровод 1 , катушку 2 подмагничивания, звуковую катушку 3, стол 4 для крепления испытуемых объектов 5, упругие элементы б, систему центрирования в виде двух разнесенных по оси вибратора и повернутых один относительно другого на угол 45 аэростатических подшипников 7 и 8;в зазоре которых расположен шток 9, дополнительную систему центрирования в виде гироскопа, маховик которого включает набор стальных шаров 10, центрирующие обоймы 11, отрезки стального троса 12, прикрепленные к ступице маховика - водилу 13, при этом водило 13 насажено на вал 14 электродвигателя 15с регулируемым числом оборотов. Стол 4 жестко соединен со I-ITOKOM 9j например, обычными болт.ами (не показаны) . К ступице маховика 13 (водилу) прикреплены лучеобразно расходящиеся от ва.па 14 двигателя 15 (фиг.З) и расположеннь1е через равные угловые интервалы отрезки стальных тросов 12, При из.гибе тросов в них появляется значительное по величине межпроволочное трение, т.е. они одновременно являются и силовыми и упруго-демпфирующими элементами. На конце каждого отрезка троса 12 закреплена центрирующая шаровая обойыа, в которой свободно размещен стальной шар. Обойма может быть выполнена в виде ПОЛОЙ полусферы или каким-либо другим образом. Llap при любых условиях должен ею удерживаться, (т.е. не выпадать из нее). Все отрезки троса 12 расположены в горизонтальной плоскости, т.е. в плоскости стола вибратора, а водило 13 соосно валу 14 электродвигателя 15, который установлен соосно вертикальной оси вибратора. В горизонтальной ппоскости также расположена кольцевая канавка (фиг. 2), выполненная на внутренней боковой поверхности стола 4 вибратора, а в ней размещены с возможностью свободного обкатывания стальные тары 10. Причем между конструктивными размерами и и Д должно выполняться соотношение Л (2-3)i. Это необходимо для того, что бы в динамическом режиме шары не слетали с канавки. Устройство работает следующим образом. При запуске вибратора, т.е. при воспроизведении испытательного режима, в силу ряда причин (осевая неоднородность магнитного поля в зазоре подвижной катушки, обратное влияние испытуемого изделия на стол вибратора: изделие большого веса представляет собой сложную колебательную систему с распределенными параметрами, центр тяжести которой, как правило, никогда не проходит через ось вибратора, в результате чего изделие интенсивно раскачивает стол в угловых направлениях) возникают пара зитные угловые колебания стола вибратора, т.е. отклонения от оси вибра тора на тот или иной угол в различны плоскостях, проходящих через эту ось. Одновременно с запиткой вибратора начинает работать дополнительная система центрирования. В начальный момент,когда паразитные угловые колебания еще не успели возникнуть, игары 10 (фиг. 4), вращаемые водилом с заданной угловой скоростью W и обкатывающиеся по кольцевой канавке стола 4 (в начальный момент стол горизонтален), воздействуют на эту канавку центробежными силами инерции F, которые в этом случае горизонтальны, причем линии их действия пересекаются в одной точке, расположен ной на оси вибратора, т.е. стол 4 уравновешен, причем F - , где m - масса шара; ш -угловая скорость вращения водила; R - расстояние от оси вибратора до центра тяжести шара После окончания переходного режи,ма, т.е. после того, как различные нежелательные технологические факторы и обратное воздействие испытуемого объекта успеют раскачать стол вибратора в угловых направлениях до максимальной величины, происходит следующее (рассмотрим случай когда стол вибратора отклоняется на угол ср в плоскости чертежа влево, фиг. 5, для угловых колебаний в любой другой плоскости все будет аналогично). Сил инерции Гц и Гц (причем Г Fd, ) попрежнему будут горизонтальны, но теперь линии их действия разнесены на величину 1, а это означает, что данные силы образуют момент Мц (фиг. 6), который направлен наветречу моменту , вызывающему паразитные угловые колебания стола 4 вибратора. Если стол под действием паразитного углового момента, действующего против часовой стрелки, отклоняется влево, то момент Мц, создаваемый дополнительной системой центрирования, будет направлен по часовой стрелке, подавляя момент М„, и возвращая стол 4 в горизонтальное положение, причем Ми. тадн, (для простоты рассматривается схема только с двумя шарами, фиг. 4-6, если же применяется много шаров, фиг. .2 и 3, то все аналогично, поскольку в этом случае происходит обычное суммирование моментов, создаваемых различными парами шаров), где m - масса шара; 1 - плечо сил F и Гц ; R, расстояние от оси вибратора до центра тяжести шара; w - угловая скорость, Изменяя угловую скорость, можно изменять по величине момент Мц, т.е. выбирать его таким, чтобы он полностью компенсировал (подавил) паразит-ный угловой момент М.ц, в результате чего можно практически полностью устранить паразитные угловые колебания стола 4 вибратора и значительно повысить точность воспроизведения вибрационных режимов. В смысле регулировки дополнительная система центрирования является очень гибкой: несмотря на то, что на разных частотных поддиапазонах общего диапазона (0-4000 Гц) и при различных массах испытуемых объектов паразитные угловые колебания имеют неодинаковую величину,их можно устранить изменением до требуемой величины угловой скорости водила. Причем это можно делать либо вручную, либо применить несложную автоматическую управляющую систему: на столе вибратора устанавливаются датчики момента паразитных угловых колебаний, показания которых считываются, поступают в автоматическую систему, которая вычисляет величину необходимого центрирующего (противодействующего момента) и выдает команду на изменение на нужную величину угловой скорости водила . Таким образом, дополнительная система центрирования позволяет практически на всем частотном диапазоне устранить паразитные угловые колебания подвижной части вибратора и существенно повысить точность воспроизводимых вибрационных режимов. Необходимо отметить, что если по каким-либо причинам возникают и паразитные поперечные (т.е. в радиальных направлениях) колебания стола вибратора, то их может устранить система центрирования в виде двух аэростатических подшипников (если учесть, что для больших масс испытуемых объектов и значительных виброускорений в рабочем направлении энергоемкость паразитных угловых ко лебаний значительно превосходит энергоем1сость паразитных поперечных колебаний, то можно полагать, что жесткости воздушного за-эора окажетс достаточно для гашения паразитных поперечных колебаний) . Отрезки стального троса позволяю устранять случайные удары, вибрации (при случайном проскальзывании шаров) , последствия переходных режимов, (быстрый переход с одной угловой скорости на другую, значительно более высокую), поскольку возникающее в их структуре интенсивное межпроволоч ое трение эффективно рассеивает дополнительные динамические нагрузки. Вместе с тем толстые стальные тросы достаточно жестки для того, чтобы без трансформации передать крутящий момент от водила на шары. Если система центрирования выполнена технологически точно и в ней предусмотрена плавная регулировка угловой скорости, вместо тросов можно ис пользовать обычные жесткие стержни. Годовой экономический эффект от внедрения и эксплуатации 100.0 шт. предлагаемых вибраторов составит не менее 300 000 руб.
W
и.2,
6-Б

| название | год | авторы | номер документа |
|---|---|---|---|
| Электродинамический возбудитель колебаний | 1982 |
|
SU1085647A1 |
| Способ передачи вибраций от вибровозбудителя к объекту | 1979 |
|
SU1121592A1 |
| ДВУХКООРДИНАТНЫЙ ВИБРОСТЕНД | 1993 |
|
RU2116639C1 |
| Электродинамический возбудитель колебаний | 1978 |
|
SU738685A1 |
| Стенд для испытания изделий на комбинированное воздействие вибрационных и линейных ускорений | 1985 |
|
SU1276997A2 |
| Подвеска сиденья транспортного средства | 1985 |
|
SU1261209A1 |
| Электродинамический вибратор | 1975 |
|
SU569889A1 |
| ПОДВЕСКА СИДЕНЬЯ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2048314C1 |
| Стенд для испытания изделий на комбинированное воздействие вибрационных и линейных ускорений | 1980 |
|
SU920429A1 |
| Учебный прибор для демонстрации прецессии гироскопа | 1988 |
|
SU1555706A1 |
ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРА ТОР по авт. св. № 466417,-о т л и чающийся тем, что, с целью tn.} повЕЛшения точности воспроизведения колебаний, в него дополнительно введен гироскоп в виде электродвигателя с насаженным на вал маховиком, в ступице которого радиально и равномерно по окружности закреплены одинаковые отрезки тросов,на вторюм конце которых закреплены шаровые обоймы с помещ енными в них с возможностью свободного вращения шарами, ари этом шток и стол выполнены полыми, гироскоп установлен соосно в образованной общей полости, а на внутренней цилиндрической поверхности выполнена дорожка качения, в которую помешены шары.
UlJ
Ю
4
(риг.if
Ми
Ui.S
fu
7 1риг. 7
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электродинамический вибратор | 1971 |
|
SU466417A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
