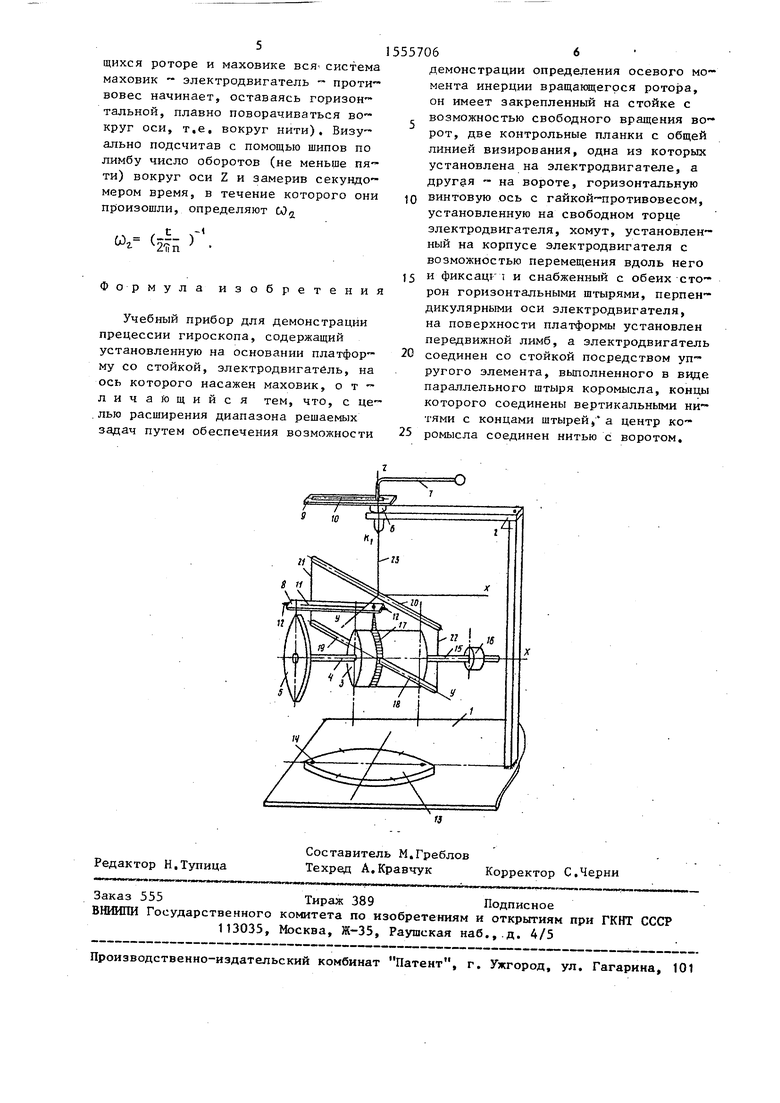
торая на планке 9 выполнена в виде сквозного тонкого паза 10, а на ланке 8 - в виде цветной черты 11, при этом планка 9 связана с воротом . 6, а планка 8 с электродвигателем 3, причем планка 8 снабжена шипами 12 ля отслеживания ее углового положения на поворотном лимбе 13, установленном на платформе 1. Для удобства jg взаимной установки планки 8 и лимба 13 последний может устанавливаться с помощью болтов 14 в любом месте плат™ формы 1, Предлагаемый прибор также содержит горизонтальную винтовую ось J5 15 с гайкой-противовесом 16, установленную (т.е., ввинченную своим левым концом) в центральное гнездо свободного торца электродвигателя 3, передвижной хомут 17, надетый на кор- 20 пус электродвигателя 3, причем хомут имеет возможность при регулировках и измерениях перемещаться на необходимую величину вдоль корпуса электродвигателя 3, но в то же время до- 25 статочно плотно на нем сидит (это и обеспечивает его последующую фиксацию) , при этом хомут 17 с обеих сторон снабжен соосными горизонтальными жесткими штырями 18 и 19, перпенди- 0 кулярными оси электродвигателя 3, а сам электродвигатель 3 соединен со стойкой 2 посредством упругого элемента в виде специального гибкого подвеса, выполненного в виде параллельного штырям 18 и 19 жесткого коромысла 20, концы которого снабжены вертикальными нитями 21 и 22, соединяющими его с соответствующими концами штырей 18 и 19, а центр коромыс- .д ла (точка 0) также соединен вертикальной нитью 23 с воротом 6. Таким образом, гироскоп 3-4-5 подвешен к вороту 6 с помощью трех гибких нитей 21-23 и промежуточного коромысла 20.
35
45
Прибор работает следующим образом. Для демонстрации прецессии гироскопа смещают хомут так, чтобы система маховик - электродвигатель .противовес вышла из состояния равно весия, Ось системы находится под некоторым углом к горизонтали. Поддерживая электродвигатель рукой, придают системе горизонтальное положение и включают двигатель, убирают руку, система остается в горизонталь ном положении и начинает вращаться в плоскости X-Y под действием гиро-
скопического момента. При выключении двигателя система опрокидывается.
Для определения осевого момента инерции вращающегося ротора передвигают хомут так, чтобы вся система стала горизонтальной. Далее, поддерживая электромотор ладонью, смещают (свинчивают), например вправо, противовес по шпильке на величину ulr, которая может быть точно измерена (например, если на шпильке резьба с шагом I мм, то один оборот гайки- противовеса соответствует ее смещению по шпильке на I мм). Поскольку центр тяжести противовеса перемещается из точки Сг в точку Сг, то изменилось местоположение общего центра тяжести всей системы в целом: если он раньше находился в точке С,,, то теперь он расположен в некоторой точке Сс с координатой Хс (при этом вес всей системы Рс остался по величине неизменным, но теперь он приложен в новом центре тяжести С), Координата Х. нового центра тяжести является величиной, которая входит в формулу для определения момента инерции
PC x;
I° cb7c5I
СО,
СОциклическая частота враще ния ротора; частота прецессии;
Р - масса ротора, В данной системе Хс определяется
по формуле Р,
Ы,
Хс 0 .д
45
50
55
где Рг - вес противовеса.
Таким образом, в конечную формулу вошли три величины, определить которые не составляет никакого труда: Р и Рс определяются обычным взвешиванием, а 41Г может быть измерено обычной линейкой, т.е. даже РС можно не определять, достаточно только взвесить противовес и определить Рг,
Далее определяют СЭ, и С02 . Обычным тахометром или строботахометром по стандартной методике, изложенной в его паспорте, или по положению рукоятки на регуляторе оборотов электродвигателя, определяют GD, При определении Wt используется свойство гироскопической системы прецессировать, т,е, вращаться вокруг оси при работающем электродвигателе (при вращаю-
5
щихся роторе и маховике вся- система маховик - электродвигатель - противовес начинает, оставаясь горизон- тальной, плавно поворачиваться во- круг оси, т.е. вокруг нити). Визуально подсчитав с помощью шипов по лимбу число оборотов (не меньше пяти) вокруг оси Z и замерив секундомером время, в течение которого они произошли, определяют Wu
bV (zln }
Формула изобретения
Учебный прибор для демонстрации прецессии гироскопа, содержащий установленную на основании платформу со стойкой, электродвигатель, на ось которого насажен маховик, отличающийся тем, что, с целью расширения диапазона решаемых задач путем обеспечения возможности
5
10
55706
демонстрации определения осевого момента инерции вращающегося ротора, он имеет закрепленный на стойке с возможностью свободного вращения ворот, две контрольные планки с общей линией визирования, одна из которых установлена на электродвигателе, а другая - на вороте, горизонтальную винтовую ось с гайкой-противовесом, установленную на свободном торце электродвигателя, хомут, установленный на корпусе электродвигателя с возможностью перемещения вдоль него и фиксацг i и снабженный с обеих сторон горизонтальными штырями, перпендикулярными оси электродвигателя, на поверхности платформы установлен передвижной лимб, а электродвигатель соединен со стойкой посредством упругого элемента, выполненного в виде параллельного штыря коромысла, концы которого соединены вертикальными нитями с концами штырей/ а центр коромысла соединен нитью с воротом.
15
20
25
| название | год | авторы | номер документа |
|---|---|---|---|
| Учебный прибор по механике | 1990 |
|
SU1767513A1 |
| УЧЕБНЫЙ ПРИБОР ПО ФИЗИКЕ | 1991 |
|
RU2017228C1 |
| Прибор для демонстрации гироскопических явлений | 1984 |
|
SU1251156A1 |
| ДЕМОНСТРАЦИОННЫЙ ВОЛЧОК | 2011 |
|
RU2496147C2 |
| ПРЕЦЕССИРУЮЩИЙ ВЕТРОДВИГАТЕЛЬ С ГОРИЗОНТАЛЬНЫМ РАСПОЛОЖЕНИЕМ ВАЛА | 2006 |
|
RU2338922C2 |
| Учебный прибор для демонстрации прецессии гироскопа под действием момента силы тяжести | 1986 |
|
SU1370662A1 |
| Прибор для демонстрации гироскопического эффекта | 1986 |
|
SU1432589A1 |
| ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ГИРОСКОПИЧЕСКОГО ЭФФЕКТА | 1992 |
|
RU2051422C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОП | 2011 |
|
RU2462761C1 |
| ПРЕЦЕССИРУЮЩИЙ ВЕТРОДВИГАТЕЛЬ С ВЕРТИКАЛЬНЫМ РАСПОЛОЖЕНИЕМ ВАЛА | 2007 |
|
RU2351794C1 |
Изобретение относится к учебным и наглядным пособиям по теоретической и прикладной механике и может быть использовано на лекциях и семинарских занятиях в высших технических учебных заведениях и университетах. Цель изобретения - наглядная демонстрация определения осевого момента инерции вращающегося ротора. Предлагаемый прибор содержит следующие основные функциональные элементы: гироскопическую систему маховик - электродвигатель - противовес, упругую подвеску гироскопической системы, передвижной хомут ворот, визирные планки, лимб для отсчета числа оборотов гироскопической системы вокруг вертикальной оси. Прибор позволяет демонстрировать, как осуществляется динамическое уравновешивание статически неуравновешенного и вращающегося на подвесе гироскопа, как обеспечивается его вращение вокруг вертикальной оси, каким образом определяется положение общего центра тяжести системы, величин угловых скоростей ω1 и ω2 и в конечном итоге момента инерции Jо вращающегося ротора-гироскопа Jо = Pс.Xс/ω1.ω2, где Pс - общий вес гироскопической системы
Xс - координата центра тяжести системы при ее вращении вокруг вертикальной оси в горизонтальном положении
ω1 - угловая скорость вращения ротора электродвигателя
ω2 - угловая скорость прецессии гироскопа. 1 ил.
| Авторское свидетельство СССР № 1146714, кл | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
