Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано в качестве захвата в различного рода устройствах, предназначенных для манипулирования изделий в виде полупроводниковых или пермаллоевых пластин или аналогичных им, а также для устройств, работающих в вакууме.
По основному авт. св.№ 727426, известен захват промышленного робота, имеющий корпус, к которому прикреплен постоянный магнит, а по наружной поверхности - гибкая мембрана, несущая равномерно расположенные по окружности губки. С внутренней стороны магнита установлена катушка, один из краев которой прикреплен к мембране. Контакты катушки индуктивности выведены через изолятор на клеммы. При подаче на катушку индуктивности постоянного напряжения происходит втягивание катушки в кольцевую проточку магнита. Гибкая мембрана при этом деформируется и губки зажимают деталь. В результате этого происходит зажим детали и она переносится устройством манипулирования на позицию разгрузки и освобождается путем снятия напряжения с катущки индуктивности 1.
Ъднако в конструкции этого устройства не предусмотрено регулирование усилия зажима детали и поэтому невозможно использовать его для взятия хрупких деталей или аналогичных им, что ограничивает функциональные возможности захвата.
Целью изобретения является расширение функциональных возможностей захвата.
Поставленная цель достигается тем, что захват промышленного робота снабжен бесконтактным датчиком усилия сжатия, выполненным в виде источника ионизирующего излучения, установленного на поверхности мембраны, обращенной к корпусу, и приемника, включающего последовательно соединенные детектор излучения, установленный на корпусе против источника ионизирующего излучения, формирователь импульсов и измеритель интенсивности излучения, а также задатчиком усилий сжатия, схемой сравнения и регулятором напряжения, содержащим ключ и интегратор, при этом выходы интегратора подключены к входам катушки индуктивности, вход его через ключ соединен с выходом схемы сравнения, один из входов схемы сравнения соединен с задатчиком усилия сжатия, а другой - с выходом измерителя интенсивности излучения.
На чертеже изображен, захват, общий вид.
Захват содержит корпус 1, на котором закреплен постоянный магнит 2. Гибкая мембрана 3 выполнена в виде диска, закрепленного по краю на корпусе. На одной из торцовых поверхностей диска по окружности расположены губки 4, к другой
торцовой поверхности диска прикреплена катушка 5 индуктивности. В постоянном магните 2 выполнена кольцевая проточка для размещения в ней катущки 5. Концы , катущки 5 индуктивности выведены через изолятор 6 на клеммы 7. Бесконтактный датчик усилия сжатия выполнен в виде источника 8 ионизирующего излучения, установленного на поверхности мембраны со стороны, обращенной к корпусу, и при0 емника, включающего последовательно соединенные детектор 9 излучения, установленный на корпусе против источника ионизирующего излучения, формирователь 10 импульсов и измеритель 11 интенсивности излучения, задатчик 12 усилия сжатия, схему 13 сравнения и регулятор напряжения, включающий ключ 14 и интегратор 15. Выход интегратора подключен ко входам катущки индуктивности, вход его через ключ соединен с выходом схемы сравне0 ния, один из входов схемы сравнения соединен с задатчиком усилия сжатия, а другой - с выходом измерителя интенсивности излучения.
Захват работает следующим образом. При выводе захвата на позицию, в ко5 торой установлена деталь, на задатчик 12 подают сигнал на его включение. Задатчик усилий представляет собой генератор импульсов, величина амплитуды которых соответствует определенному значению усилия, которое определяется при настройке. Импульсы с задатчика 12 усилий сжатия подаются на схему 13 сравнения. На второй вход этой схемы подается напряжение с выхода измерителя 11. Если амплитуда сигнала на входе схемы сравнения превосходит уровень напряжения, подаваемого с выхода измерителя 11, то схема сравнения срабатывает, заставляя в свою очередь сработать ключ 14, который выдает импульс, сформированный по форме и амплитуде. С выхода ключа 14 импульс поступает
на интегратор 15, в результате чего напряжение на его выходе увеличивается на строго определенную величину. Это напряжение через усилитель мощности (на чертеже не показан) подается на катушку 5 индуктивности, которая начинает втягиваться в кольцевую проточку постоянного магнита 2. Гибкая мембрана 3 деформируется и губки 4 занимают положение, показанное на чертеже штриховыми линиями. В результате деформации мембраны 3 изменяется
Q расстояние между источником 8 ионизирующего излучения и детектором 9 излучения. Детектор 9 излучения регистрирует кванты источника 8 излучения и преобразовывает их в электрические импульсы, которые формируются формирователем 10 по длитель5 ности и амплитуде и подаются на измеритель 11. Интенсивность ионизирующего излучения, регистрируемого детектором 9 излучения, изменяется при изменении расстояния между источникам 8 излучения и детектором 9.
При уменьшении расстояния интенсивность сигнала увеличивается, а следовательно увеличивается и напряжение, которое снимается с выхода измерителя 11. Напряжение на выходе измерителя 11 увеличивается из-за изменения указанного расстояния под действием деформации мембраны 3, которая изгибается и в результате втягивания катушки 5 в кольцевую проточку постоянного магнита 2 при
изменении напряжения на выходе интегратора 15 с поступлением на вход последнего импульсов с ключа 14. Этот процесс повторяется до тех пор, пока не будет достигнута полная компенсация, т. е. пока значение напряжения на выходе измерителя 11 не достигнет величины амплитуды импульса с задатчика 12 усилия сжатия. Данный захват позволяет осуществить взятие детали с плавным регулированием усилия сжатия, что необходимо при взятии хрупких деталей, например полупроводниковых пластин.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления сепарацией сыпучих материалов | 1988 |
|
SU1639745A1 |
| Измеритель ионизирующих излучений | 1987 |
|
SU1476415A1 |
| Устройство для регулирования межэлектродного промежутка в процессе электроискрового легирования | 1987 |
|
SU1414536A2 |
| Устройство для измерения поверхностного натяжения жидкости | 1983 |
|
SU1157408A1 |
| Устройство для контроля магнитныхпАРАМЕТРОВ элЕКТРОМАгНиТА | 1979 |
|
SU834637A1 |
| Схват манипулятора | 1984 |
|
SU1206081A1 |
| Способ автоматической стабилизации коэффициента передачи детектирующего тракта и устройство для его осуществления | 1988 |
|
SU1605805A1 |
| Устройство для испытания материалов на ударное сжатие | 1980 |
|
SU922581A1 |
| Устройство для измерения линейных перемещений | 1981 |
|
SU1004746A1 |
| Способ сигнализации метановыделения в шахтах и устройство для его осуществления | 1987 |
|
SU1518549A1 |
ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА по авт. св. № /27426, отличающийся тем, что, с целью расширения функциональных возможностей, он снабжен бесконтактным датчиком усилия сжатия, выполненным в виде источника ионизирующего излучения, установленного на поверхности мембраны, обращенной к корпусу, и приемника, включающего в себя последовательно соединенные детектор излучения, установленный на корпусе против источника ионизирующего излучения, формирователь импульсов и измеритель интенсивности излучения, а также задатчиком усилий сжатия, схемой сравнения и регулятором напряжения, содержащим ключ и интегратор, при этом выходы инте1ратора подключены к входам катущки индуктивности, вход его через ключ соединен с выходом схемы сравнения, один из входов схемы сравнения соединен с задатчиком усилия сжатия, а другой - с выходом измерителя интенсивности излучения. (Л со о ел СП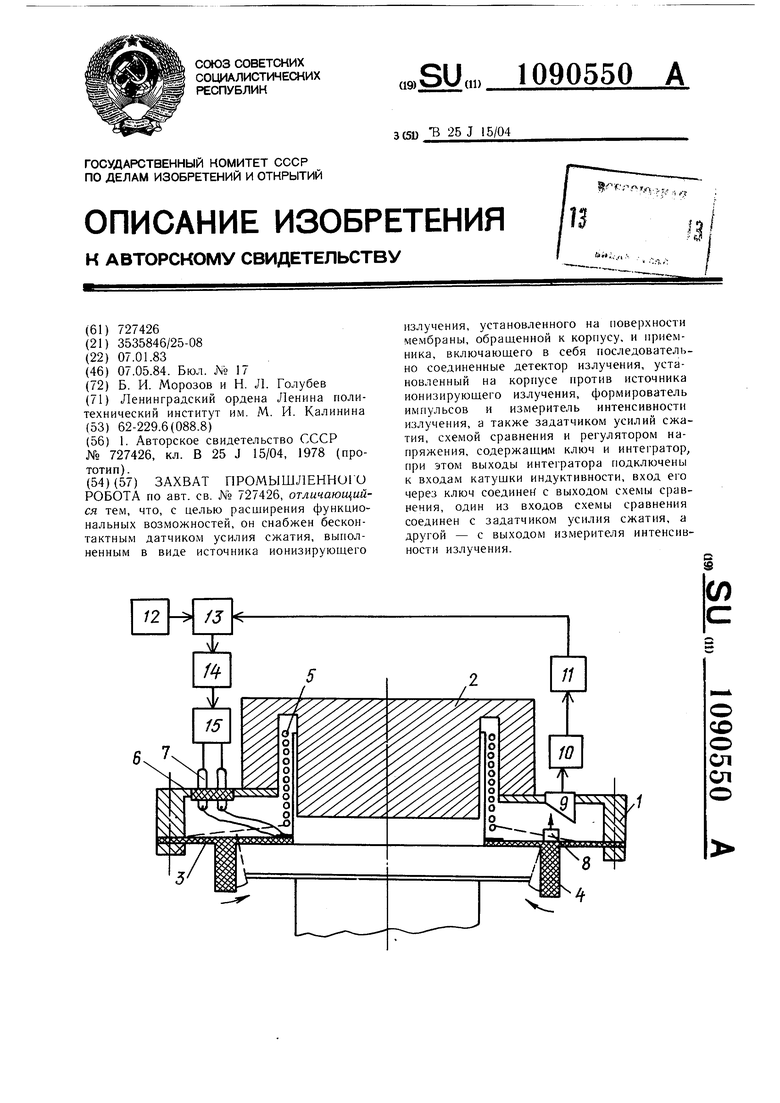
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват | 1978 |
|
SU727426A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
