Изобретение ртносится к захватным приспособлениям адаптивных роботов- манипуляторов и может быть использовано для захвата объектов манипулирования посредством адаптации к их типу и ориентации.
Цель изобретения - расширение функциональных возможностей, способных обеспечить определение типоразмера захватываемого объекта и соответствующее изменение усилия захвата
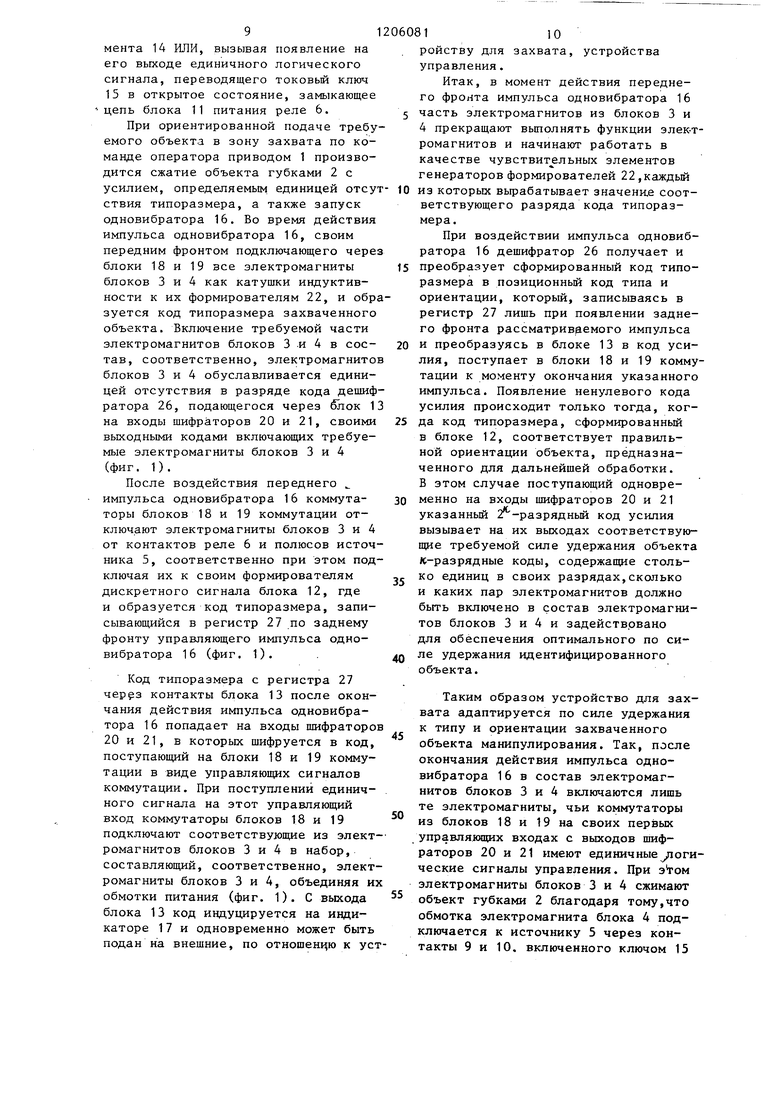
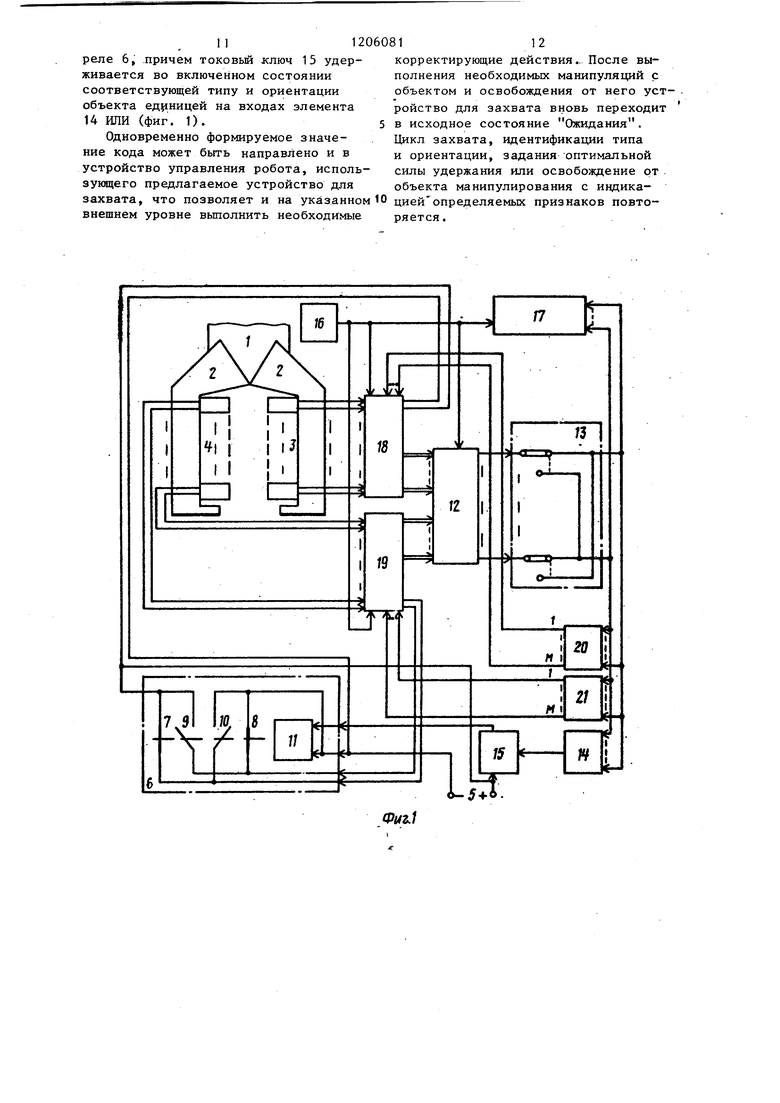
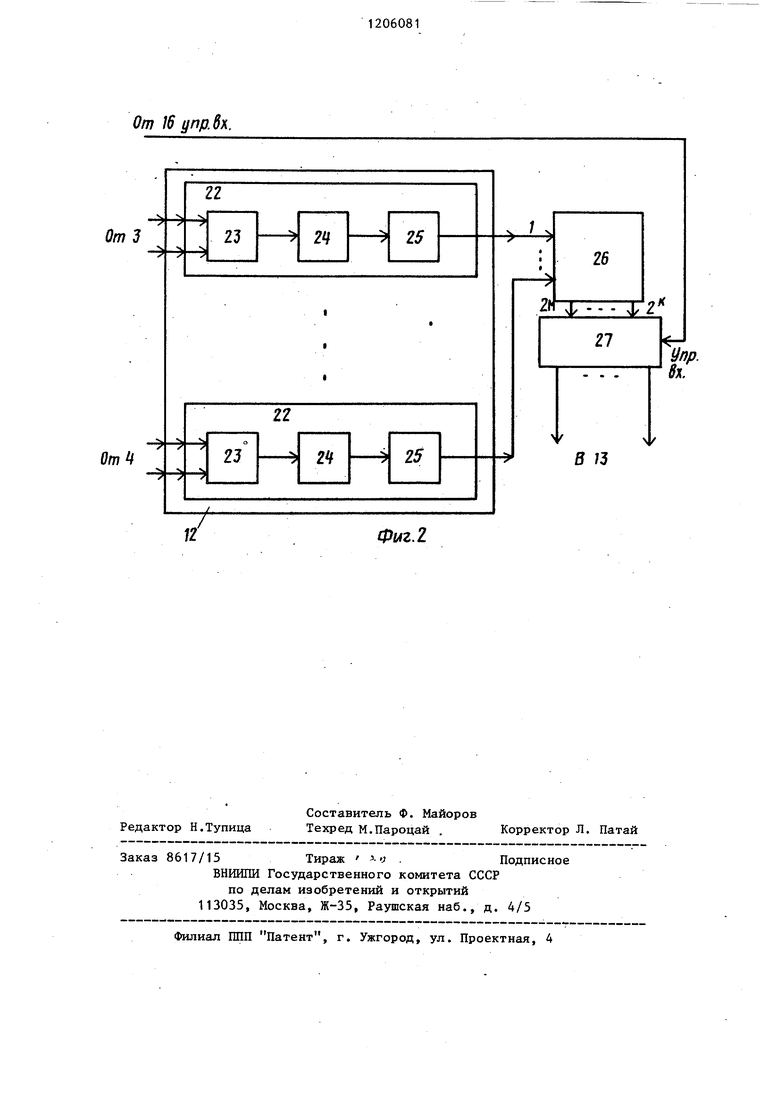
На фиг. 1 показана структурная схема схвата манипулятора ;на фиг .2- схема блока формирования кода типоразмера.
Схват манипулятора содержит связанные с приводом 1 губки 2 с расположенными на них блоками 3 и 4, каждый из которых представляет собой комплект идентичных электромагнитов, источник 5 постоянного тока, ..реле 6, включающее нормально замкнутые контакты 7 и 8 и нормально разомкнутые контакты 9 и 10, а также блок 11 питания.
Кроме того, устройство содержит последовательно соединенные блок 12 формирования кода типоразмера с управляющим входом, блок 13 комму- тадаи, элемент 14 ИЛИ и токовьй ключ 15, включенный в блок питания реле. Устройство содержит также вибратор, например одновибратор 16, индикатор 17 типа и ориентации с управляющим входом, блоки 18 и 19 коммутации, каждый из которых имеет два входа управления, шифраторы 20 и 21. При этом входы блока 12 формирования кода, типоразмера связаны с первыми выходами блоков 18 и 19 коммутации, первые управляющие вхо- ;Ды которых подключены, соответствен- но, к выходам шифраторов 20 и 21, входами связанных с выходами блока 13, которые подсоединены к входам элемента 14 ИЛИ и входам индикатора 17 типа и ориентации, управляющий вход которого и управляющий вход блока 12 формирования кода типоразмера, а также вторые управляющие входы блоков 18 и 19 коммутации подключены к выходу одновибрато- ра 16.
Электромагниты одной губки расположены против электромагнитов другой губки. В разрыв цепи пита- .ния обмоток электромагнитов включены соответственно блоки 18 и 19 коммутации. Два вторых выхода блока 18 коммутации непосредственно подключены к полюсам источника 5
постоянного тока, к которым два вторых выхода блока 19 коммутации подсоединены в отдельности парами контактов 7, 9 и 8, 10 реле 6. Первые выходы блоков 18 и 19 коммутации соединены с соответствующими входами блока 12 формирования кода типоразмера.
Блок 12 формирования кода типоразмера (фиг. 2) состоит из формирователсй 22 дискретного сигнала, каждый из которых содержит последовательно соединенные автогенератор 23, детектор 24 и формирователь 25 импульса, вьжод которого служит
выходом формирователя 22 сигнала, а входами последнего и входами блока 12 форм:11рования кода типоразмера являются входы автогенератора 23, чувствительным элементом которого
являются обмотки электромагнитов блоков 3 и 4. Выход каждого формирователя 22 дискретного сигнала соединен с входом дешифратора 26, выходами связанного с входами регистра 27 кода, управляющий вход и выходы которого служат управлякядим входом и выходами блока 12 формирования кода типоразмера.
Количество формирователей 22 дискретного сигнала соответствует количеству электромагнитов.
Устройство для захвата работает следующим образом.
В производстве объекты манипулирования часто поступают в зону захвата робота-манипулятора ориентированные неправильно, что при их дальнейшей обработке приводит к нарушению условий выполнения технологических операций. Кроме того, в обрабатываемую совокупность объектов возможно попадание таких кото - рые не предусмотрены технологическим процессом. Для исключения подобных
ситуаций посредством придания про- мьшшенным роботам, оснащенным устройством для захвата, возможности адаптации к типу и ориентации обрабатываемых ими объектов манипулирования, в устройстве осуществляется функция идентификации типа и ориентации захваченных объектов и отработки получаемых результатов, на
3
пример, освобождением от непредусмотренных для обработки объектов или от обрабатьшаемых объектов,ориентированных в зоне захвата непредусмотренным образом.
Режим работы устройства характеризуется состояниями Ожидания, Захвата, Освобождения от удер- живаемьк неправильно, Удерживания нужного объекта с требуемой.
ориентацией и Отпускания.
Режиму работы предшествует режим обучения устройства для захвата. В исходном положении при включении источника 5 губки 2 разведены при- В9ДОМ 1 и блоками 3 и 4, обмотки электромагнитов которых подключены к источнику 5 нормально замкнутыми контактами 7 и 8 реле 6 так, что они создают встречные магнитные поля, отталкивающие губки 2. Такое включение обеспечивается единичными значениями управляющих сигналов, поступающих на первые щие входы блоков 18 и 19 с выходов шифраторов.
Блоки 18 и 19 коммутации обеспечивают подключение электромагнитов, выбранных симметрично шифраторами к полюсам источника 5 непосредственно и через контакты 7, 9 и 8, 10 реле 6 соответственно. Кроме того, на время действия импульса одновиб- ратора 16 блоки коммутации осуществляют подсоединение каждого электромагнита из блоков 3 и 4 к своему формирователю 22 дискр етного сигнал в качестве его чувствительного элемента.
В состоянии Ожидания блоки 18 и 19 коммутации по единичным сигналам с первых управляющих входов через свои вторые выходы подключены параллельно обмотки каждого из элекромагнитов блоков 3 и 4 в отдельности. Таким образом, электромагниты блоков 3 и 4 создают встречные магнитные потоки, а реле 6 оказывается включенным вследствие того, что все 2 контакта блока 13 замкнуты и связывают, выходы блока 12с входами элемента 14 ИЛИ (фиг.2 и 1)
Блок 12 формирует двоичный позиционный код типоразмера объекта в момент поступления на его управля кщий вход заднего фронта импульса с одновибратора 16, запускающегося в момент включения источника 5, и
06081
до момента формирования позиционно- го кода. При поступлении переднего фронта указанного сигнала на вторые, управляющие входы блоков 18 и 19
5 коммутации, подключающих обмо- ки электромагнитов блоков 3 и 4 к формирователям 25, производится формирование разрядного двоичного кода признака объекта при разведенных
10 2 или отсутствии объекта в зоне захвата в состоянии Ожидания (фиг. 2).
Сформированный на формирователях 22 двоичный код поступает на входы
15 дещифратора 26 и в виде 2 -разрядного позиционного кода подается на входы регистра 27 (фиг. 2). Так дешифратор 26 вырабатывает соответствующий каждому поступающему на
20 его входы коду типоразмера один- единственный единичный логический сигнал на одном из своих выходов. Отсутствие объекта в зоне захвата соответствует нулевому коду на входе
25 дешифратора 26, который приводит к возникновению соответствукщего единичного значения в одном из разрядов позиционного кода на выходе деошфратора 26.
При такой разрешающей способности может быть идентифицировано 2 различных значений типоразмеров, соответствующих типу и ориентации удерживаемых объектов в зоне захва 5 та. Поскольку одновибратор 16 запускается после включения источника 5 лишь при выполнении приводом 1 захвата объекта, то до указанного момента обеспечивается неизменность кода,
хранимого в регистре 27 и записанного в него при; поступлении на его управляющий вход заднего фронта импульса одновибратора 16 (фиг. 2). Код отсутствия типоразмера, поступая
с выходов регистра 27 на 2 входы блока 13 и через замкнутые оператором контакты блока 13 на его 2 выходы и далее на входы элемента 14 ИЛИ, поддерживает на выходе последнего
50 уровень логической единицы, удержи- вающей токовый ключ 15 в открытом состоянии, замыкающем блок 11 питания реле 6. Перёд захватом объекта обмотки электромагнитов блока 4
55 через нормально замкнутые контакты 7 и 8 реле 6 подключены к источнику 5 таким образом, что происходит .взаимное отталкивание губок 2 магнитными ПОЛЯМИ электромагнитов блоков 3 и 4 (фиг. 1).
Вьшолнение режима обучения уст- ройства для захвата производится следуй им образом.Перед захватом объект пода- 5 т в зону движения руки манипулятора или иным способом. Таким образом, объект оказывается определенным образом сориентированным по отношению к губкам 2 в зоне захвата. При 10 сжатии губок 2 приводом 1 для их ускоренного сближения и захвата объекта манипулирования подается напряжение от источника 5 через открытый ключ 15. Реле 6 включается и 15 переключаются его контакты, меняющие полярность питания, подаваемого на обмотки электромагнитов блокрв 3 и 4, вследствие чего магнитные поля электромагнитов притягивают губки 2 20 со средним значением усилия захвата, определяемым кодом отсутствия типоразмера в зоне захвата в исходном состоянии Ожидания.
Так, при подаче напряжения от ис- 25 точника 5 и включении привода 1 просходит захват объекта, усилие удерания которого представляет собой умму указанного усилия взаимодействия магнитных полей и привода 1. 30 Следовательно, усилие удержания объектов может меняться при изменении интенсивности взаимодействия рассмотренных магнитных потоков,что, в свою очередь, может регулировать- jc ся соответствующим включением необходимого числа электромагнитов блоков 3 и 4. Для реализаи|;ии дифференцированного, по усилию сжатия, удержания захватываемых объектов 40 манипулирования в режиме обучения исследуется получаемый код типоразмера, правильно ориентированного в зоне захвата объекта, подлежащего дальнейшей обработке. .45
I
Формирование кода типоразмера,уже присутствующего в зоне захвата объекта, производится при действии импульса с выхода одновибратора 16, вьгра- батьшающегося в момент срабатывания привода 1 на сжатие губок 2 и подачи напряжения от источника 5 оператором или по команде внешнего устройства управления всей робототехничес- кой системой, Сигнал с выхода одно- 55 вибратора 16 поступает на вторые управляющие входы блоков 18 и 19 коммутации (фиг. 1), при этом каждый кбммутатор блоков своими вторыми выходами подключает обмотки питания соответствующих электромагнитов блоков 3 и 4 к входу формирователя 22 блока 12 (фиг. 2). Таким образом каждая обмотка, как катушка индуктивности с расположенным внутри нее ферромагнитным полюсом, выполняет функции нечувствительного элемента автогенератора 23 своего формирователя 22 при ее подключении через коммутаторы блоков.
Включенная в колебательный контур автогенератора 23 катушка индуктивности создает электромагнитное поле с частотой 200-300 кГц, и наличие металлических объектов под ее полюсом приводит к срыву этой генерации за счет возникновения противодействующего электромагнитного потока вихревых токов,направленного против потока катушки индуктивности. Срыв колебаний фиксируется детектором 24, и соответствующий сигнал с последнего поступает на формирователь 25 импульса, вырабатывающего сигнал наличия поверхности объекта в исследуемой конкретным электромагнитом точке зоне захвата, т.е. определенный разряд 2М-разрядного двоичного кода типоразмера. Так конфигурация объекта в зависимости от его ориентации по отношению к электромагнитам блоков 3 и 4 в зоне захвата характеризуется кодом его типоразмера, показывающим соответствие типа обрабатываемого объекта одному из заданных возможных, а также правильность его положения в зоне захвата .
Если в режиме обучения захвачен и удерживается в нужном положении объект требуемого типа, то вькод разряда регистра 27, содержащий единственную единицу позиционного выходного кода дешифратора 26,замыканием вручную соответствуницего контакта блока 13 подается на вход элемента 14 ИЛИ, единичный выходной сигнал которого обеспечивает открытое состояние токового ключа. 15 и включенное состояние реле бив режиме работы устройства для захвата, что обеспечивает удержание в нем рассматриваемого объекта в данном положении. Указанный единичный jpas- ряд позиционного кода типоразмера
1 .
посыпается переключателем блока 13 в выходной разряд кода усилия блока 13 (фиг. 1), соответствующий требуемой оптимальной силе сжатия идеи .тифицированного губками 2 объекта. При соответствующей организации Ш1фраторов 20 и 21 старшая единица их входных 2 -разрядных кодов приводит к возникновению выходных М-разрядных кодов с большим числом единичных разрядов. Таким образом, посыпка единицы позиционного кода типоразмера объекта с разряда его типа в требуемьй разряд усилия его захвата и удержания переключателями блока определяет алгоритм адаптации устройства для захвата к обрабатывамым объектам по усилию их захвата и удержания ,Следовательно, требуемая адаптация к типу и ориентации захватываемых объектов обеспечивается организацией связей между входными и выхо ньши разрядами блока 13, соответст- вукяцими оптимальным усилиям сжатия объекта, которые определяются индивидуальными свойствами каждого идентифицируемого объекта.
Организация указанных связей для всех объектов, входящих в их обрабатываемую совокупность и правильно располагающихся в зоне захвата, приводит к тому, что объекты, не предназначенные для вьшолнения с ними каких-либо манипуляций, или обрабатываемые объекты, расположенные в зоне захвата неправильным образом, вызывают появление таких кодов их типоразмеров, единичные разряды которых не проходят через контакты блока 13 на вход элемента 14 ИЛИ. Отсутствие на входах элемента 14 ИЛИ единичных логических сигналов приводит к разрыву цепи в блоке 11 реле 6, его обесточиванию, в результате чего вновь меняется .полярность питания обмоток электро- .магнитов блоков 4, а возникающие маг нитные поля отталкивают и разводят губки 2, освобождая ненужную в данной технологической операции совокупность объектов или нужный объект, но ориентированный неправильно.
Повторяя процедуру сжатия губок 2 при помещении между ними последовательно всех объектов из их обрабатываемой совокупности требуемым образом код оптимальной силы сжатия сопостав060818
ляется коду типоразмера, что выражается в организации в блоке 13 соответствующих связей между регистром 27 и элементом 14 ИЛИ (фиг. 1). Код 5 усилия, соответствующий типу и ориен-- тации объекта манипулирования, индицируется индикатором 17 (фиг. 1). Так,в установлении однозначного соот- ветствия между каждым сориентированным 10 объектом из всей обрабатьшаемой совокупности и признаком его типа и ориентации, определяющимися типоразмером,- и задании для него оптимальной силы захвата и удержания заключается про- 15 ведение режима обучения захватного приспособления.
Для установления однозначного соответствия между исследуемыми объектами и их признаками режим обучения вклю- 20 чает в себя также и выполнение этапа отбраковки, присущего всем обучающимся робототехническим устройствам. Указанньй этап заключается в вьшвле- НИИ и устранении из всей рассматри25 ваемой совокупности отличных один от другого объектов, но не идентифицируемых отдельно данным способом, что в данном случае может быть при неустраняемом равенстве кодов типо0 размеров отличных объектов манипулирования или их разных ориентации.
После выполнения режима обучения устройство для захвата переходит в режим работы, который осуществляется
5 следующим образом.
В состоянии Ожидания губки 2 разведены и в старшем разряде кода типоразмера на выходе дешифратора 26 возникает единица отсутствия объекта,
0 определяющаяся нулевыми сигналами, поступающими с выходов всех формирователей 22 из-за отсутствия объекта у поверхностей соприкосновения в момент поступления переднего фронта
5 импульса с одновибратора 16 на
вторые управлякицие входы блоков 18 и 19. Единица этого разряда по заднему фронту импульса одновибратора 16 записывается в регистр 27 с выхода
0 дешифратора 26 и поступает на вход блока 13 .(фиг. 1).
После действия управляющего сигнала с одновибратора 16 единица отсутствия типоразмера, сформированная без объекта в зоне захвата или при разжатых губках 2, через один из первоначально замкнутых 2 контактов блока 13 поступает на свой вход элемента 14 ИЛИ, вызывая появление на его выходе единичного логического сигнала, переводящего токовый ключ 15 в открытое состояние, замыкающее цепь блока 11 питания реле 6.
При ориентированной подаче требуемого объекта в зону захвата по команде оператора приводом 1 производится сжатие объекта губками 2 с
усилием, определяемым единицей отсут- ю из которых вырабатывает значени.е соотствия типоразмера, а также запуск одновибратора 16. Во время действия импульса одновибратора 16, своим передним фронтом подключающего через блоки 18 и 19 все электромагниты блоков 3 и 4 как катушки индуктивности к их формирователям 22, и образуется код типоразмера захваченного объекта. Включение требуемой части электромагнитов блоков 3 .и 4 в состав, соответственно, электромагнитов блоков 3 и 4 обуславливается единицей отсутствия в разряде кода дешифратора 26, подающегося через ёлок 13 на входы шифраторов 20 и 21, своими выходными кодами включающих требуемые электромагниты блоков 3 и 4 (фиг. 1).
После воздействия переднего импульса одновибратора 16 коммутаторы блоков 18 и 19 коммутации отключают электромагниты блоков 3 и 4 от контактов реле 6 и полюсов источника 5, соответственно при этом подключая их к своим формирователям дискретного сигнала блока 12, где и образуется код типоразмера, записывающийся в регистр 27 .по заднему фронту управляющего импульса одно- вибратора 16 (фиг. 1).
Код типоразмера с регистра 27 черрз контакты блока 13 после окончания действия импульса одновибратора 16 попадает на входы шифраторов 20 и 21, в которых шифруется в код, поступающий на блоки 18 и 19 коммутации в виде управляющих сигналов коммутации. При поступлений единичного сигнала на этот управляющий вход коммутаторы блоков 18 и 19 подключают соответствующие из электромагнитов блоков 3 и 4 в набор, составляющий, соответственно, электромагниты блоков 3 и 4, объединяя их обмотки питания (фиг. 1). С выхода блока 13 код индуцируется на индикаторе 17 и одновременно может быть подан на внешние, по отношению к устройству для захвата, устройства управления.
Итак, в момент действия переднего фронта импульса одновибратора 16 часть электромагнитов из блоков 3 и 4 прекращают выполнять функции электромагнитов и начинают работать в качестве чувствит ельных элементов генераторов формирователей 22 ,каждьй
ветствующего разряда кода типоразмера.
При воздействии импульса одновибратора 16 дешифратор 26 получает и
преобразует сформированный код типоразмера в позиционный код типа и ориентации, который, записываясь в регистр 27 лишь при появлении заднего фронта рассматриваемого импульса
и преобразуясь в блоке 13 в код усилия, поступает в блоки 18 и 19 коммутации к моменту окончания указанного импульса. Появление ненулевого кода усилия происходит только тогда, когда код типоразмера, сформированный в блоке 12, соответствует правильной ориентации объекта, предназначенного для дальнейшей обработки. В этом случае поступающий одновременно на входы шифраторов 20 и 21 указанный 2 -разрядньй код усилия вызывает на их выходах соответствующие требуемой силе удержания объекта К-раэрядные коды, содержащие столько единиц в своих разрядах,сколько и каких пар электромагнитов должно быть включено в состав электромагнитов блоков 3 и 4 и задействовано для обеспечения оптимального по силе удержания идентифицированного объекта.
Таким образом устройство для захвата адаптируется по силе удержания к типу и ориентации захваченного объекта манипулирования. Так, после окончания действия импульса одно- вибратора 16 в состав электромагнитов блоков 3 и 4 включаются лишь те электромагниты, чьи коммутаторы из блоков 18 и 19 на своих первых управляющих входах с выходов шифраторов 20 и 21 имеют единичные оги- ческие сигналы управления. При электромагниты блоков 3 и 4 сжимают объект губками 2 благодаря тому,что обмотка электромагнита блока 4 подключается к источнику 5 через контакты 9 и 10, включенного ключом 15
5
0
5
реле 6, .причем токовый ключ 15 удерживается во включенном состоянии соответствующей типу и ориентации объекта ед 1ницей на входах элемента 14 ИЛИ (фиг. 1).
Одновременно формируемое значение кода может быть направлено и в устройство управления робота, использующего предлагаемое устройство для
захвата, что позволяет и на указанном Ю цией определяемых признаков повто- внешнем уровне вьшолнить необходимые ряется.
корректирующие действия.. После выполнения необходимых манипуляций с объектом и освобождения от него устройство для захвата вновь переходит в исходное состояние Ожидания. Цикл захвата, идентификации типа и ориентации, задания оптимальной силы удержания или освобождение от . объекта манипулирования с индика-

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для промышленного робота-манипулятора | 1983 |
|
SU1126432A1 |
| Многоканальное устройство контроля для управляющих вычислительных систем | 1983 |
|
SU1101829A1 |
| Устройство для контроля полупроводниковых приборов | 1989 |
|
SU1705783A1 |
| Устройство для сопряжения ЭВМ с внешними устройствами | 1988 |
|
SU1536392A1 |
| Система передачи и приема информации | 1987 |
|
SU1411795A1 |
| Преобразователь перемещения в код | 1982 |
|
SU1043701A1 |
| Многоканальное устройство для включения резервных радиостанций | 1990 |
|
SU1748299A1 |
| Устройство для ввода информации | 1981 |
|
SU955011A2 |
| Устройство для распределения приоритетных заявок по процессорам | 1987 |
|
SU1495795A1 |
| Устройство для контроля цифровых узлов | 1983 |
|
SU1166120A1 |

От 16 ynfl.8)(.
It
Редактор Н.Тупица
Составитель Ф. Майоров Техред М.Пароцай .
8617/15 Тираж ху .Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
%;. 8х,
Фиг. 2
Корректор Л. Патай
| Захват | 1978 |
|
SU727425A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
