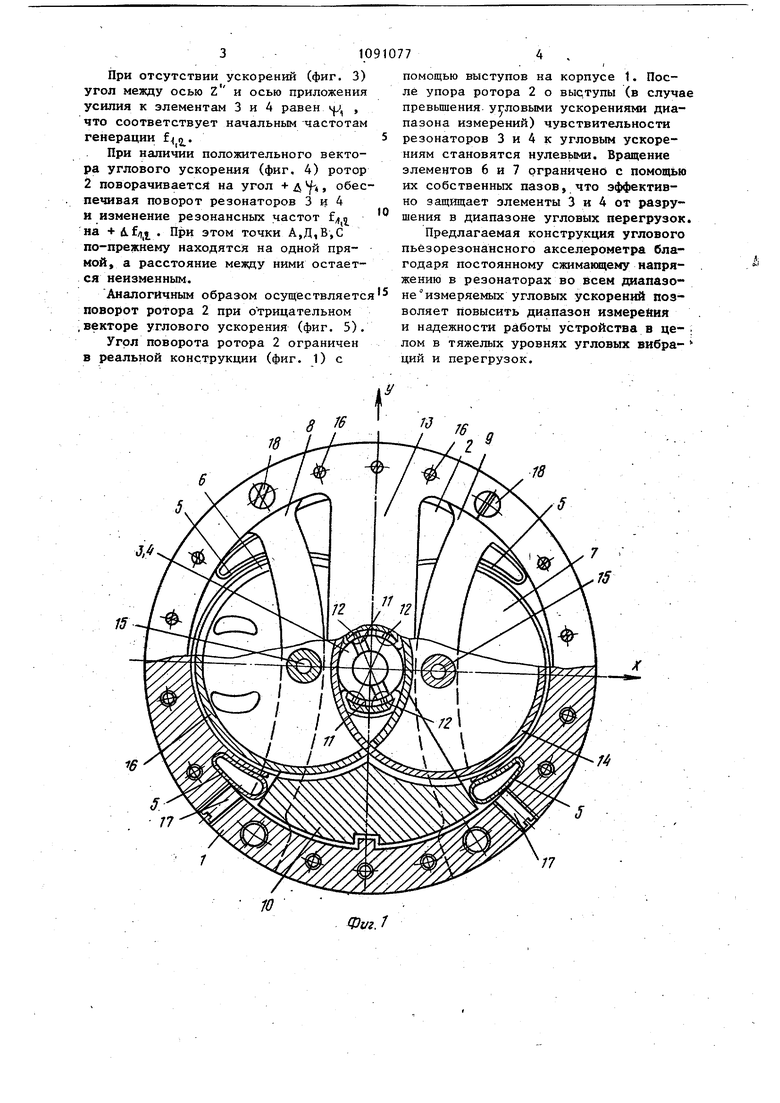
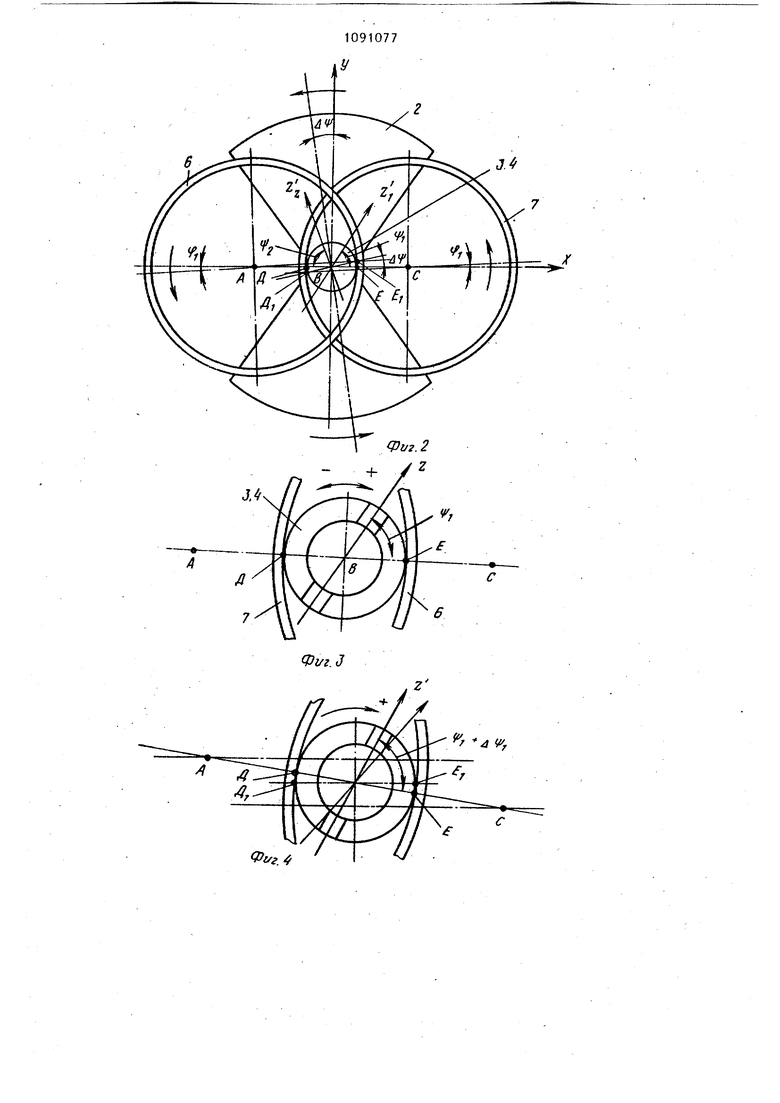
t Изобретение относится к измерен параметров движения, в частности к угловым низкочастотным акселеромет рам с вибрационно-частотным первич ным измерительным преобразователем пьезорезонансного типа. Известны измерители угловых уск рений струнного типа, имеющие отнэ сительно низкие диапазон измерений и надежность, обусловленные ограни чением по прочности струнЩ)1х элеме тов СПНаиболее близким к. предлагаемому акселерометру по технической сущнос ти и достигаемым результатам являет ся устройство, содержащее установле ные в корпусе упругие элементы, эле менты предварительного поджатия и цилиндрические силопередающие элементы, между которьми установлены пьезорезонаторы. Усилие растяжениясжатия пьезорезонаторов передается от инерционных масс посредством цилиндрических силопереданицих элементов 112. Недостатком устройства является ограниченный диапазон измерения, обусловленный прочностью пьезорезонаторов при перегрузках Цель изобретения - расширение .ДШ , , -- 1-х-л «, ли ширения ..ди пазона измерения угловых ускорений. она измерения угловых ускорений. Указанная цель достигается тем, что в угловом пьезорезонансном аксел рометре, содержащем установленные в корпусе упругие элементы, элементы предварительного поджатия и цилиндрические силопередающие элементы, между которыми установлены пьезо резонаторы, в корпусе между упругими элементами установлен ротор, внутри которого соосно с осью вращения жестко закреплены два выполненных в виде дисков пьезорезонатора, а цилиндрические силопередающие элементы установлены в корпусе с воз можностью свободного вращения. На фиг. 1 представлена упрощен ная конструктивная схема акселерометра; на фиг. 2 - кинематическая схема чувствительного элемента ак селерометра; на фиг. 3-5 - три состояния точек контакта резонатоторов с сипопередающими элементами. Угловой пьезорезонансньй акселерометр содержит корпус 1с установленным в нем ротором 2. Пьезорезонаторы 3 и 4 жестко закреплены внутри ротора 2 соосно с осью его вра1077щения. Ротор 2 установлен между упругими элементами 5, создающими возвратный момент к измеряемым угловым ускорениям. Цилиндрические силопередающие элементы 6 и 7 установлены в корпусе 1 с возможностью свободного вращения относительно их осей симметрии таким образом, чтобы их боковые стенки пересекали друг друга в специально выполненных пазах. Между элементами 6 и 7 жестко зажаты резонаторы 3 и 4. Первый 8 и второй 9 элементы предварительного поджатия фиксируют центры вращения цилиндрических сипопередающих элементов 6 и 7 относительно корпуса 1. Акселерометр закрыт крьппкой (не показана). Кроме этого, устройство содержит раму ротора 10 с диэлектрическими держателями 11, в которых выполнены электрические выводы 12. Ротор 2 зафиксирован по центру ак|селерометра с помощью собственных опор (не показаны), опираняцихся на фиксирующие планки t3. Цилиндрические силопередакицие элементы 6 и 7 выполнены в виде корпусов 14, в центрах осей симметрии которых установлены шарикоподшипники 15. Фиксируюлены шарикоподшипники 15. Фиксирующие планки 13 закреплены на корпусе тптлхч .-- -t -1 с помощью винтов 16. Рабочие положения упругих элементов 5 изменяютс помощью регулировочных винтов i -iiiuiA оиитил 17. Перемещения элементов 8 и 9 предварительного поджатия осуществляются эксцентричньми винтами 18. Конструкция обеспечивает постоянное усилие поджатия пьезорезонаторов. Угловой пьезорезонансный акселеометр работает следующим образом. При наличии угловых ускорений отор 2 в силу собственной инерционости поворачивается на угол А фиг. 2). На этот же угол перемещаютя резонаторы 3 и. 4, поворачивающие лементы 6 и 7 на углы ф, , в резульате чего изменяются углы приложения силий, передаваемых через элементы и 7 на пьезореэонаторы 3 и 4 по отошению к осям Z элементов 3 и 4, Крутящий момент ротора 2 опредеяется его собственным моментом инери и жесткостью пружин 5. На фиг. 3-5 показаны три состояния чек контакта элементов 3 и 4 (Д и с силопередающими элементами 6 7. При отсутствии ускорений (фиг. 3) угол между осью Z и осью приложения усилия к элементам 3 и 4 равен у, , что соответствует начальным частотам генерации .При наличии положительного вектора углового ускорения (фиг. 4) ротор 2 поворачивается на угол + д Y обес печивая поворот резонаторов 3 и 4 и изменение резонансных частот на +u. . При этом точки А,Д,В,С по-прежнему находятся на одной прямой, а расстояние между ними остается неизменным. Аналогичным образом осуществляетс поворот ротора 2 при отрицательном векторе углового ускорения (фиг. 5). Угол поворота ротора 2 ограничен в реальной конструкции (фиг. 1) с
10
Фиг. 1 помощью выступов на корпусе 1. После упора ротора 2 о выцтупы (в случае превьшения угловыми ускорениями диапазона измерений) чувствительности резонаторов 3 и 4 к угловым ускорениям становятся нулевыми. Вращение элементов 6 и 7 ограничено с помощью их собственных пазов, что эффективно защищает элементы 3 и 4 от разрушения в диапазоне угловых перегрузок. Предлагаемая конструкция углового пьёзорезонансного акселерометра благодаря постоянному сжимающему напряжению в резонаторах во всем диапазоне измеряемых угловых ускорений позволяет повысить диапазон измерения и надежности работы устройства в це- ; лом в тяжелых уровнях угловых вибраций и перегрузок.
Фг/г.д
Фг/г.4
J.
/,
фиг. 5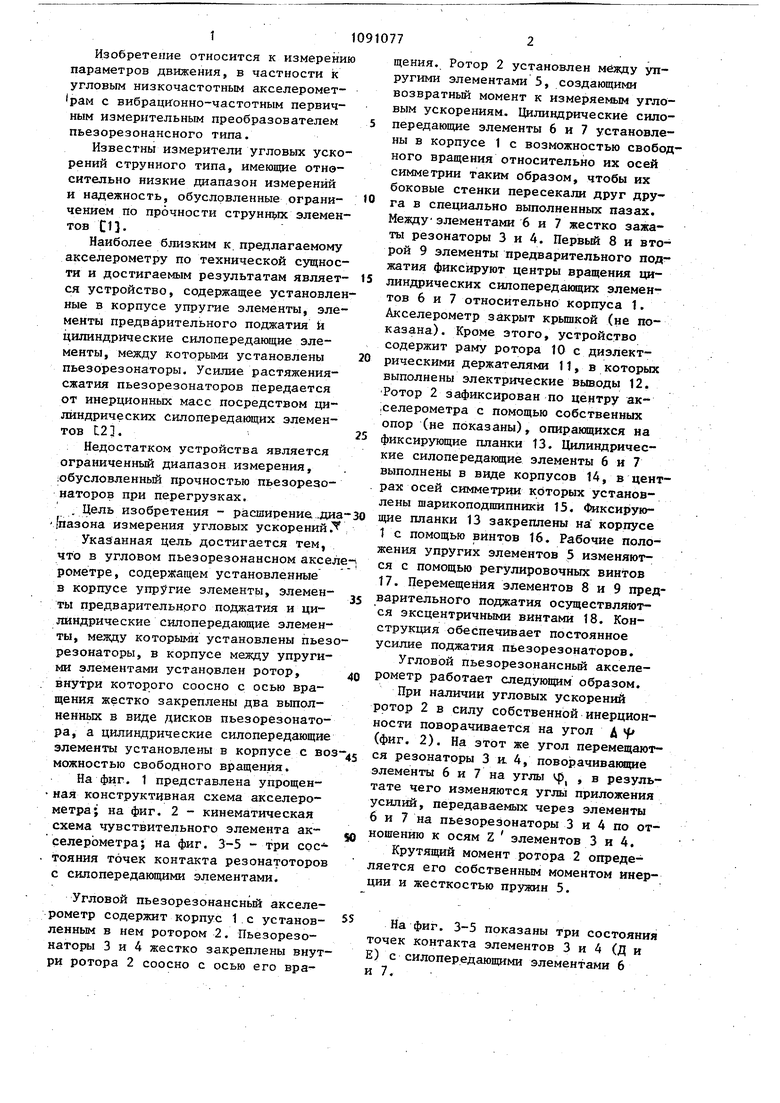
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальный виброакселерометр | 1982 |
|
SU1037184A1 |
| Пьезорезонансный датчик давления | 1986 |
|
SU1326917A1 |
| ПЬЕЗОРЕЗОНАНСНЫЙ ПРЕОБРАЗОВАТЕЛЬ УСИЛИЙ | 2006 |
|
RU2344390C2 |
| ПЬЕЗОРЕЗОНАНСНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ АБСОЛЮТНОГО ДАВЛЕНИЯ | 2016 |
|
RU2623182C1 |
| Датчик силы | 1984 |
|
SU1167452A1 |
| Дифференциальный датчик давления с частотным выходом | 1989 |
|
SU1749734A1 |
| Дифференциальный угловой пьезоэлектрический акселерометр | 1983 |
|
SU1136084A1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| ПЬЕЗОРЕЗОНАНСНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ | 2004 |
|
RU2282837C2 |
| Датчик давления | 1977 |
|
SU631793A1 |
УГЛОВОЙ ПЬЕЗОРЕЗОНАНСНЫЙ АКСЕЛЕРОМЕТР, содержащий установленные в корпусе упругие элементы, элементы предварительного поджатйя и цилиндрические силопередающие элементы, между которыми установлены пьезорезонаторы, о т л и ч а ю щ и и с я тем, что, с целью расширения диапазона измерений, в корпусе между упругими элементами установлен ротор, внутри которого соосно и жестко закреплены два пьезорезонатора, выполненных в виде дисков, а цилиндрические силопередающие элементы установлены в корпусе с возможностью С2 € свободного вращения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР №, 475553, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4155257, кп | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
