Изобретение относится к измерительной технике, а именно к средствам контроля измерителей угловых скоростей (ИУС).
Известны стенды для контроля датчика угловых скоростей.
Такие стенды содержат двигатель постоянного тока, снабжены редуктором, выходное звено которого предназначено для вращения платформы, на которую устанавливают проверяемый датчик угловой скорости так, что его ось чувствительности параллельна оси вращения платформы стенда. На оси платформы установлен коллектор для подвода питания к контролируемому прибору. На платформе стенда нанесена шкала для отсчета угловой скорости. Такую конструкцию имеют широко применяемые стенды ПС-1 (техническое описание 6360/ОЗЗОТО).
Недостатками стенда этой конструкции являются:
- большая погрешность задания угловой скорости (при скоростях от 1o/с и выше ±1%, а в диапазоне от 0,1 до 1o/с в пределах ±10%).
- нестабильность задаваемой угловой скорости вследствие вибраций и толчков, создаваемых механическими передачами стенда, равная ±1,5%,
- невозможность задания малых угловых скоростей 0.01o/с, а также гармонически изменяющихся угловых скоростей.
Известен стенд Массачусетского технологического института, содержащий поворотную платформу для закрепления на ней контролируемого ДУС, установленную на оси стенда, чувствительный элемент, электродвигатель и усилитель (Сломянский Г. А., Прядилов Ю.Н. Поплавковые гироскопы и их применение. М., 1958 г., стр. 178-190) /1a/.
В качестве чувствительного элемента стенд содержит интегрирующий гироскоп, достаточно грубый по своим техническим характеристикам. Входная ось контролируемого ДУС параллельна оси вращения платформы.
Стенд не получил применения для контроля масштабного коэффициента прецизионных ДУС из-за его достаточно низких технических характеристик.
Известен стенд для контроля датчиков угловых скоростей по а.с. N 476516 от 28.05.73 г. , который содержит основание, имеющее возможность вращаться вокруг оси стенда, предназначенное для закрепления на нем контролируемого датчика угловой скорости, имеющего датчик угла, датчик момента, соединенные через усилитель обратной связи, электродвигатель привода стенда, редукцию, коллектор для подвода питания к контролируемому ДУС, информационный датчик угла, выполненный в виде нуль-контакта, закрепленного на оси вращения стенда, и измерительную систему.
Нуль-контактный датчик предназначен для отсчета целого числа оборотов вращающейся оси (с контролируемым ДУС), что позволяет определять среднюю за оборот задаваемую угловую скорость и таким образом компенсировать ее колебания за счет неравномерности вращения оси стенда.
Измерительная система содержит конденсатор, включенный последовательно в цепь обратной связи контролируемого ДУС между выходом усилителя обратной связи ДУС и его датчиком момента, и ключ, включенный параллельно конденсатору.
Таким образом, при контроле проверяемый прибор соединен с элементами измерительной системы стенда. Кроме того, измерительная система содержит два источника эталонного напряжения и самопишущий милливольтамперметр. При этом один эталонный источник подключен параллельно к ключу и конденсатору, а ко второму эталонному источнику параллельно подключено эталонное сопротивление.
Устройства, описанные выше, имеющие в качестве основы электромеханический стенд с редукцией, не позволяют контролировать амплитудно-частотную (АЧХ) и фазово-частотную (ФЧХ) характеристики ДУС, также относящиеся к основным контролируемым параметрам. При контроле АЧХ и ФЧХ задаются не механические колебания вокруг оси чувствительности ДУС, как это имеет место в эксплуатации, а колебания его оси прецессии, возбуждаемые генератором, подключенным к датчику момента ДУС. Таким образом, имеет место неадекватность условий испытаний эксплуатационным условиям.
Наиболее близким к заявляемому стенду является устройство по авторскому свидетельству SU 459735 A, 05.02.75, G 01 P 21/00, содержащее двигатель постоянного тока, кольцевой коллектор со щетками для подвода питания, платформу для крепления измерителей угловых скоростей, закрепленную на валу, установленному в корпусе с возможностью вращения. Указанное устройство принято за прототип.
Описанное устройство SU 459735 A, 05.02.75, G 01 P 21/00 имеет следующие недостатки:
1. Недостаточная точность контроля масштабного коэффициента прецизионного ДУС вследствие погрешности и нестабильности задания стендом постоянной по величине и направлению угловой скорости;
2. Низкая чувствительность стенда, т.е. невозможность точного задания угловых скоростей от 0,01 до 0,1o/с при аттестации прецизионных ДУС по масштабному коэффициенту;
3. Невозможность задания с помощью стенда гармонических колебаний вокруг оси чувствительности ДУС при контроле АЧХ и ФЧХ.
Задачей изобретения является расширение функциональных возможностей стенда при обеспечении высокой точности и стабильности задания угловых скоростей. Поставленная задача решается посредством того, что в стенд для контроля измерителей угловых скоростей (ИУС), содержащий корпус, вал, установленный в корпусе с возможностью вращения, закрепленную на валу платформу для установки измерителя угловых скоростей, электродвигатель постоянного тока, кольцевой коллектор, состоящий из коллекторной втулки и щеток для подвода питания, введены дополнительная платформа, закрепленная на валу, шесть кварцевых маятниковых акселерометров, гироскопический датчик угловой скорости, цилиндрическая втулка, стержень, ленточный торсион, упругий торцевой токоподвод, два геркона, магнит, механизм отслеживания, суммирующий двухканальный усилитель, персональная ЭВМ, аналого-цифровой преобразователь, имеющий четыре входа, плата цифровых портов ввода-вывода, двухпозиционное реле и транзисторный ключ, усилитель системы стабилизации с сумматором, входящим в его состав, источник калиброванного напряжения и блок управления механизмом отслеживания, при этом гироскопический датчик угловой скорости и акселерометры закреплены на дополнительной платформе, оси чувствительности трех акселерометров для измерения тангенциального ускорения перпендикулярны соответствующим радиусам дополнительной платформы, а оси чувствительности трех акселерометров для измерения центробежного ускорения ориентированы вдоль соответствующих радиусов дополнительной платформы, каждый акселерометр содержит кварцевую пластину, емкостной датчик угла и магнитоэлектрический датчик момента, соединенные последовательно через соответствующие усилители обратной связи, имеющие второй выход с нагрузочного резистора, гироскопический датчик угловой скорости содержит датчик угла и датчик момента, соединенные последовательно через усилитель обратной связи, имеющий три выхода, а ось чувствительности гироскопического датчика угловой скорости параллельна оси вала, упругий торцевой токоподвод содержит верхнюю и нижнюю гетинаксовые колодки и золотые проводники подвода питания, прикрепленные к колодкам, два геркона закреплены на нижней колодке с обеспечением угла 6o между контактами герконов, магнит закреплен на верхней колодке в среднем положении между контактами герконов, цилиндрическая втулка подвешена в корпусе на шарикоподшипниковых опорах соосно с валом, проходящим внутри цилиндрической втулки, верхняя колодка упругого торцевого токоподвода закреплена на валу, а нижняя колодка - на цилиндрической втулке, вал выполнен полым на одном участке своей длины, ленточный торсион размещен в полости вала и прикреплен нижним концом к торцу полого участка вала, а верхним концом к середине стержня, который расположен перпендикулярно оси вала, проходит через отверстия цилиндрического полого участка вала и прикреплен двумя концами к торцам цилиндрической втулки, жестко соединенной с коллекторной втулкой, механизм отслеживания содержит импульсный шаговый двигатель и зубчатую передачу, при этом шаговый двигатель прикреплен к корпусу через амортизатор, выходное звено зубчатой передачи закреплено на цилиндрической втулке соосно с ней, суммирующий двухканальный усилитель имеет в каждом канале три входа и один выход, а его коэффициент передачи по каждому входу 1/3, аналого-цифровой преобразователь и плата цифровых портов ввода-вывода встроены в слоты персональной ЭВМ, вход транзисторного ключа соединен с выходом платы портов ввода - вывода, а выход соединен с обмоткой двухпозиционного реле, имеющего два входа, усилитель системы стабилизации с сумматором закреплен на дополнительной платформе, причем сумматор имеет три входа и один выход, блок управления механизмом отслеживания имеет два входа, соединенных с герконами, и четыре выхода, соединенных с обмотками импульсного шагового двигателя, второй выход усилителя обратной связи гироскопического датчика угловой скорости соединен с третьим входом аналого- цифрового преобразователя, четвертый вход которого предназначен для соединения с выходом измерителя угловой скорости, третий выход усилителя обратной связи гироскопического датчика угловой скорости соединен с первым входом реле, три входа первого канала и три входа второго канала суммирующего двухканального усилителя соединены соответственно с выходами с нагрузочных резисторов акселерометров для измерения центробежных ускорений и акселерометров для измерения тангенциальных ускорений, первый выход суммирующего двухканального усилителя соединен с первым входом аналого-цифрового преобразователя и вторым входом реле, второй выход суммирующего двухканального усилителя соединен со вторым входом аналого-цифрового преобразователя и первым входом сумматора усилителя системы стабилизации, выход коммутируемых линий реле соединен со вторым входом этого сумматора, его третий вход соединен с выходом источника калиброванного напряжения, а его выход соединен с первым входом усилителя системы стабилизации, первый, второй и третий выходы усилителя системы стабилизации соединены с первым, вторым и третьим входами электродвигателя постоянного тока, первый и второй выходы которого соединены со вторым и третьим входами усилителя системы стабилизации, при этом электродвигатель постоянного тока выполнен бесконтактным.
Совокупность существенных признаков, характеризующих заявляемое техническое решение, позволяет в сравнении с прототипом достигнуть технический результат, заключающийся в следующем:
1.Чувствительность предлагаемого стенда, т.е. минимальная угловая скорость, которую можно задать при проверке масштабного коэффициента контролируемого ИУС, определяется не моментами трения по оси вращения стенда и коэффициентом трения в редукции, как это имеет место в прототипе, а чувствительностью гироскопического датчика угловой скорости, тангенциального и центробежного акселерометров, чему соответствует величина угловой скорости, на несколько порядков меньшая, чем в прототипе.
2. Повышение точности и стабильности задаваемой угловой скорости обеспечивается:
- за счет наличия в стенде двухконтурной системы управления. Это позволяет за счет одного контура (цепи обратной связи гироскопического ДУС и кварцевых акселерометров) обеспечить устойчивость системы, повысив при этом во втором контуре коэффициент усиления усилителя стабилизации, управляющего бесконтактным двигателем до величины, необходимой для достижения заданной точности и стабильности,
- за счет наличия механизма отслеживания коллектора и торсиона разгрузки шарикоподшипниковых опор оси вращения вала от веса испытуемого прибора. Это позволяет на порядок снизить трение по оси подвеса вала и, соответственно, повысить точность и стабильность задаваемой стендом угловой скорости. Снижение момента трения происходит за счет:
- полного исключения влияния на ось вращения вала момента трения коллектора, т. к. коллекторная втулка имеет свою ось подвеса, и момент трения в коллекторе "парируется" шаговым двигателем механизма отслеживания, а к оси вала приложен малый момент упругих торцевых токоподводов,
- разгрузки шарикоподшипников оси вращения вала от веса испытуемого прибора путем "взвешивания" платформы с испытуемым прибором на ленточном торсионе, испытывающем при этом растяжение и передающем вес платформы с испытуемым прибором на шарикоподшипники оси вращения коллектора.
3. Возможность контроля АЧХ и ФЧХ на стенде, т.е. расширение функциональных возможностей, что обеспечивается, в отличие от прототипа, безредукторным исполнением привода оси вала.
4. Предлагаемое устройство позволяет производить измерение масштабного коэффициента прибора при повороте оси вала на любой угол, значительно меньший оборота, что сокращает время испытаний. Это обеспечивается за счет высокоточного задания и измерения угловой скорости вращения платформы.
5. В предлагаемом устройстве управление двигателем осуществляется не только по угловой скорости, измеряемой чувствительными элементами стенда - гироскопическим ДУС и центробежными акселерометрами, но и по угловому ускорению, измеряемому тангенциальными акселерометрами, что улучшает качество регулирования и снижает погрешности системы управления.
6. В предлагаемом устройстве обеспечивается широкий диапазон задаваемых угловых скоростей за счет применения в качестве чувствительных элементов системы управления двигателем гироскопического ДУС и кварцевых акселерометров - тангенциального и центробежного, подключаемых в автоматизированном режиме ПЭВМ в зависимости от задаваемой угловой скорости. Стенд может обеспечить диапазон задаваемых угловых скоростей от 0,01 до 1260o/с, практически для контроля большинства современных измерителей угловых скоростей достаточен диапазон задаваемых угловых скоростей от 0,01 до 200o/с.
7. В предлагаемом устройстве обеспечивается выходная информация не только по угловой скорости, но и по углу разворота платформы, а также по угловому ускорению вращения платформы.
8. Устройство стыкуется с ПЭВМ. Таким образом, заявляемое техническое решение представляет собой новую совокупность признаков по сравнению с известными решениями задачи, оно не очевидно из уровня техники и может быть признано соответствующим критерию "изобретательский" уровень".
Техническая сущность предлагаемого устройства поясняется чертежами фиг. 1, 2, 3, 4, 5, 6.
На фиг. 1 представлена функционально-кинематическая схема предлагаемого стенда.
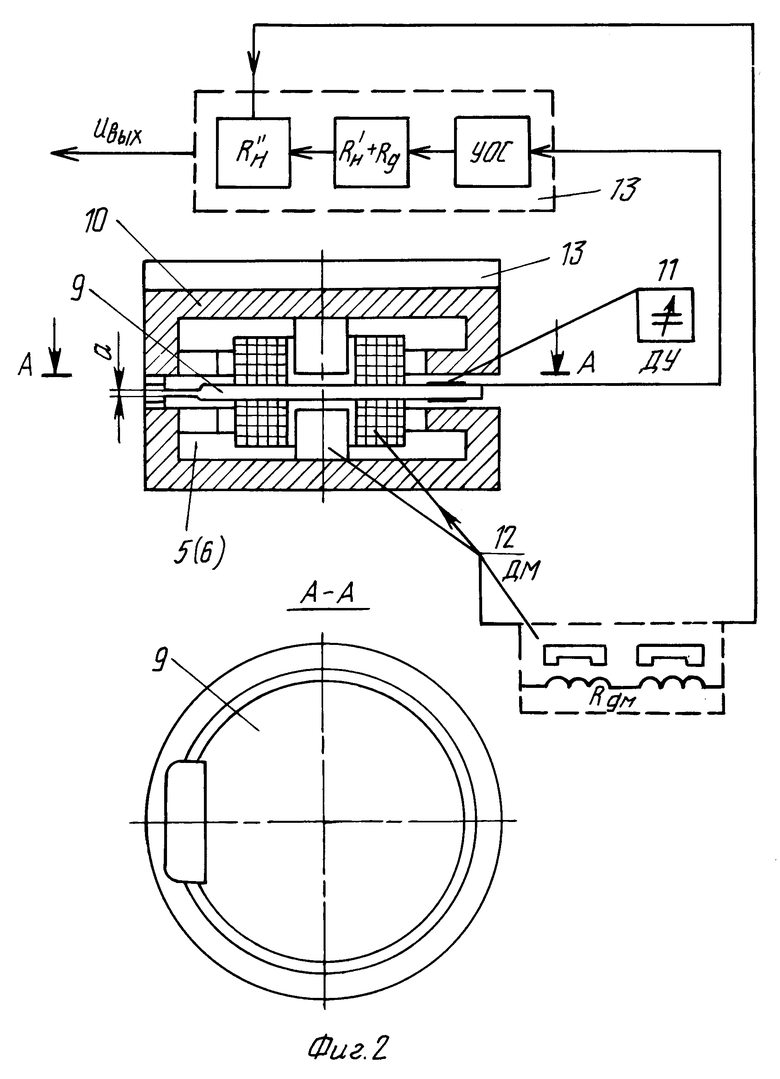
На фиг. 2 - конструктивная схема кварцевого акселерометра.
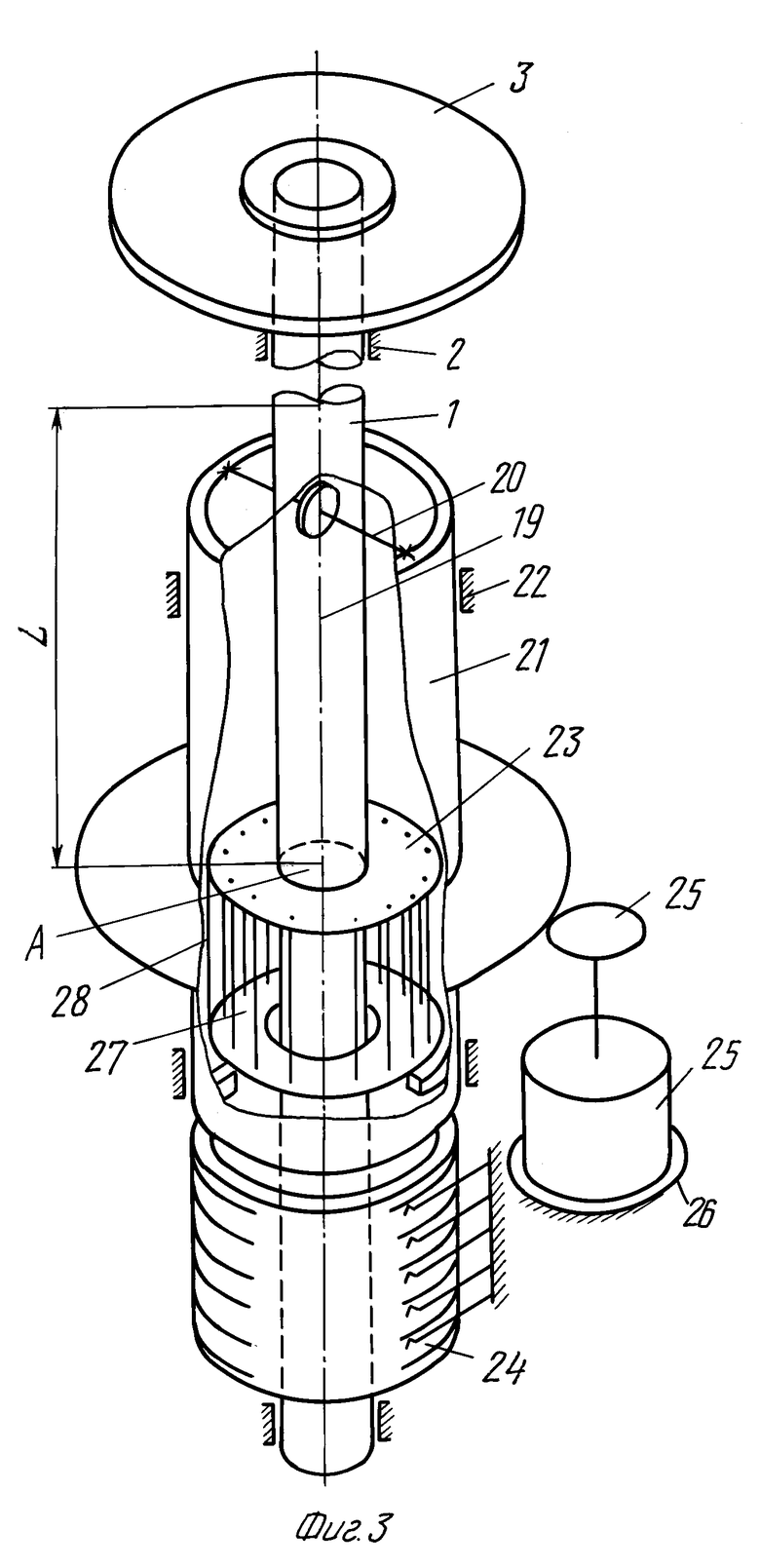
На фиг.3 - конструктивная схема механизма отслеживания коллектора, устройства разгрузки опор подвеса вала с помощью ленточного торсиона.
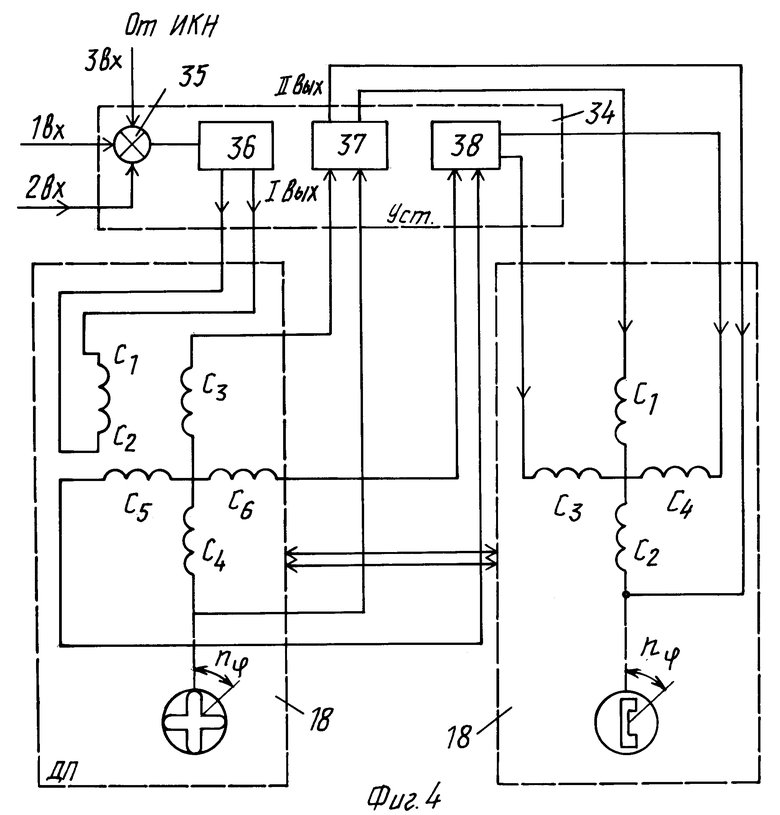
На фиг. 4 - структурная схема усилителя системы стабилизации и бесконтактного двигателя постоянного тока.
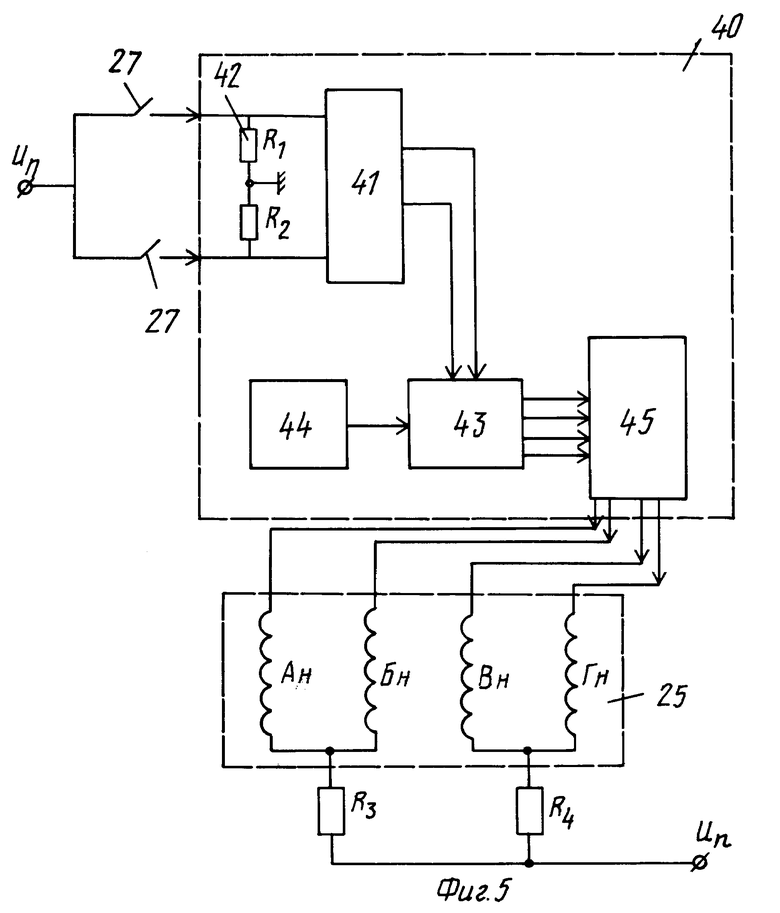
На фиг. 5 - функциональная схема блока управления механизмом отслеживания.
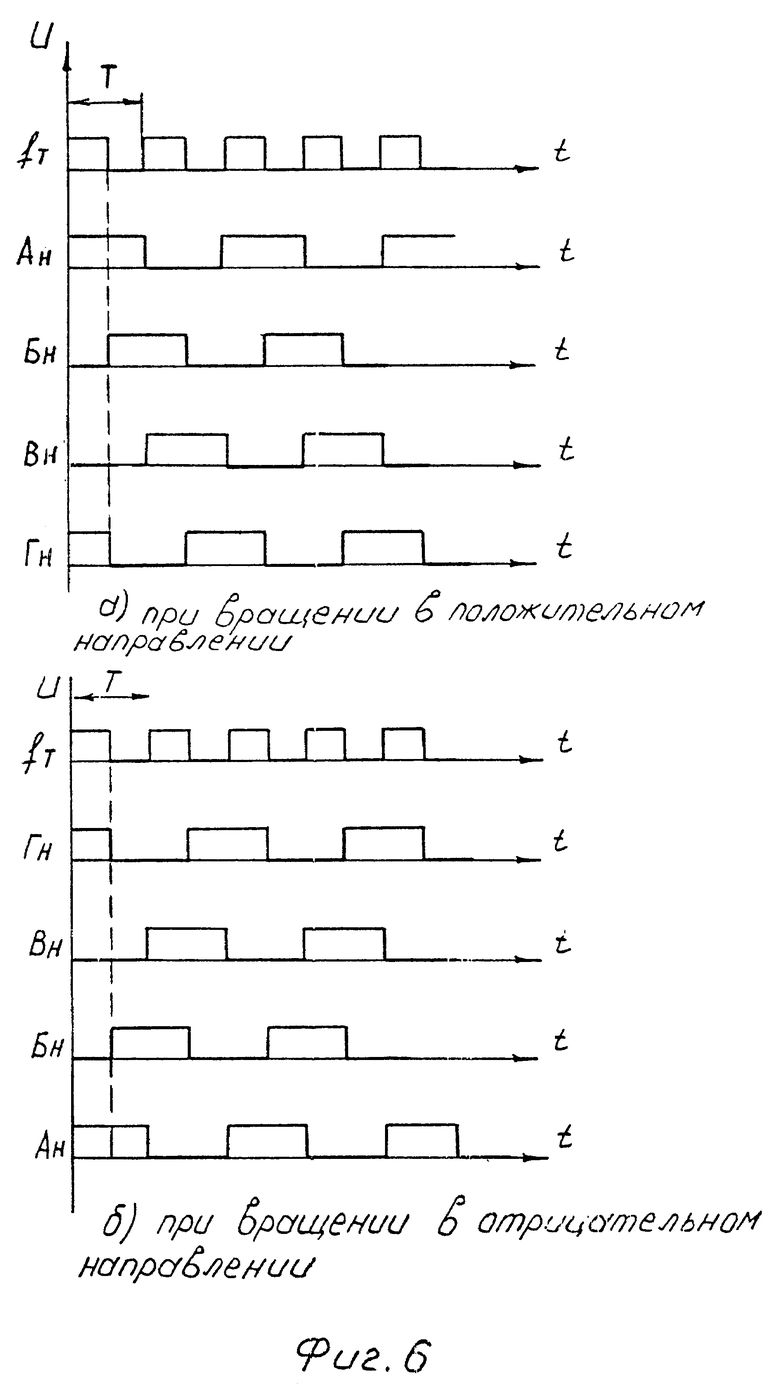
На фиг. 6 - диаграмма подачи импульсов на обмотки шагового двигателя механизма отслеживания. Предлагаемое устройство содержит корпус (на фиг. 1 не показан), вал 1, имеющий ось вращения относительно корпуса, реализованную на шарикоподшипниках 2, которая является выходной осью стенда. На валу 1 закреплена платформа 3, предназначенная для установки испытуемого прибора 4. На валу 1 закреплены чувствительные элементы стенда:
акселерометры линейных ускорений 5, 6 и гироскопический поплавковый датчик угловой скорости - ДУС 7. Конструктивно это закрепление выполнено так, что на валу 1 закреплена дополнительная платформа 8, на которой размещены все чувствительные элементы. При этом акселерометры 5 в количестве трех закреплены на платформе 8 так, что они измеряют тангенциальное ускорение вращения платформы. (Для этих трех акселерометров 5 на фиг.1 введено дополнительное обозначение 1т, 2т, 3т). В дальнейшем акселерометры 5 (1т, 2т, 3т) называются тангенциальными. Ось чувствительности каждого акселерометра 5 перпендикулярна радиусу R1 платформы 8. Радиусы R1 акселерометров 5 (1т, 2т, 3т) расположены под углами 120o. Акселерометры 6 в количестве трех закреплены на платформе 8 так, что они измеряют центробежное ускорение вращения платформы (для этих трех акселерометров 6 введено дополнительное обозначение 1ц, 2ц, 3ц.). В дальнейшем акселерометры 6 (1ц, 2ц, 3ц) называются центробежными. Ось чувствительности каждого акселерометра 6 расположена вдоль радиуса R2= R1 платформы 8. Радиусы R2 акселерометров 6 (1ц, 2ц, 3ц) расположены под углами 120o. ДУС 7 закреплен на платформе 8 так, что ось его чувствительности параллельна оси вращения стенда (оси вала 1), вектор кинетического момента H параллелен плоскости платформы 8.
Чувствительным элементом акселерометров 5,6 является кварцевая пластина 9, у которой центральная часть (собственно маятник - фиг. 2) соединена с наружным кольцом пластины 9 - торсионом, выполненным из той же самой пластины в виде местного утончения до размера a=0,06 мм. Наружное кольцо пластины 9 зажато между двумя корпусами 10 акселерометра. Датчик угла 11 акселерометра - емкостной дифференциальный выполнен в виде напыления из золота на маятнике пластины 9 и поверхностях корпусов 10. Датчик момента 12 магнитоэлектрический, состоит из катушек, закрепленных на маятнике пластины 9, и постоянных магнитов, зацепленных на корпусах 10. Электрическая связь между обкладками датчика угла 11, катушками датчика момента 12 и внешними цепями осуществлена с помощью золотого напыления на торсионе пластины 9. Акселерометр 5, закрепленный на платформе 8 так, что ось его чувствительности перпендикулярна радиусу R1 платформы 8, имеет при этом расположение плоскости пластины перпендикулярно плоскости платформы. Акселерометр 6, закрепленный на платформе 8 так, что его ось чувствительности расположена вдоль радиуса R2 платформы 8 (причем R1=R2), имеет при этом расположение плоскости пластины 9 перпендикулярно радиусу R2, плоскость его пластины 9 также перпендикулярна плоскости платформы 8. Усилители обратной связи 13 обоих акселерометров 5 и 6 абсолютно идентичны, выполнены каждый в виде бескорпусной гибриднопленочной микросборки на керамической подложке. Корпус усилителя обратной связи 13 закреплен непосредственно на корпусе соответствующего акселерометра 5 и 6. В состав усилителя 13 входит, кроме собственно усилителя обратной связи, УОС, нагрузочный резистор, выполненный в виде последовательного соединения резисторов R'н и R''н и, соединенных последовательно с обмоткой датчика момента 10 - (сопротивление которой Rдм).
Резисторы R'н и R''н подпаяны к выводам микросборки усилителя 13. Выходной сигнал акселерометра 5 (6) снимается с резистора R'н. Соединение датчика угла 11 акселерометра 5 (6), усилителя 13, датчика момента 12 образует контур обратной связи кварцевого акселерометра 5 (6). (На фиг. 2 показаны, помимо конструктивного исполнения элементов акселерометров 5, 6, их функциональные схемы и связи с усилителем обратной связи 13).
Конструкция кварцевого акселерометра разработана институтом МИЭА, имеет серийное исполнение АК-6 (6В2.781.278 ТУ) [1], в настоящее время модернизируется с целью повышения точности ПО "Корпус" г. Саратов).
Чувствительный элемент стенда - ДУС 7 представляет собой гироскопический поплавковый датчик угловой скорости, содержащий гиромотор 14, датчик угла 15 и датчик момента 16, соединенные с усилителем обратной связи 17. Выход датчика угла 15 соединен с входом усилителя обратной связи 17, первый выход последнего соединен с входом датчика момента 16. Это соединение образует обратную связь датчика угловой скорости КХ79-060, разработанного КБ П.О. "Корпус" [КХ4.012.060 ТУ] [2]. В качестве усилителя обратной связи используется разработанный КБ П.О. "Корпус" УОС-071 [КХ2.549.071].
На оси вала 1 закреплена подвижная часть двигателя постоянного тока 18, выполненного по схеме "Датчик положения - двигатель бесконтактный" (ДП-ДБ). Неподвижные части ДП-ДБ соединены в одном корпусе, жестко закрепленном на корпусе предлагаемого устройства. Датчик положения ДП представляет собой синусно-косинусный вращающийся трансформатор (фиг. 4) с безобмоточным ротором (обмотка C1-C2 - обмотка возбуждения; C3-C4, C5-C6 - синусная и косинусная обмотки). Конструктивное исполнение такого вращающегося трансформатора описано, например, в книге Ахмеджанов А.А. "Системы передачи угла повышенной точности", М.- Л., "Энергия", 1966 г. [3]. Вторая часть двигателя, собственно бесконтактный двигатель ДБ, имеет двухобмоточный статор (обмотки C1-C2, CЗ-C4) и восьмиполюсный ротор. Такие двигатели описаны, например, в книге Дубенского А. А. "Бесконтактные двигатели постоянного тока", М., "Энергия", 1967 г. [4].
На фиг. 3 представлена детализированная конструктивная схема соединения вала 1 с элементами, закрепленными на нем (ниже двигателя постоянного тока 18).
Вал 1 выполнен в виде трубы на длине 1, который соединен в единую строго соосную систему с верхней и нижней частями вала 1, имеющими сплошное сечение.
К торцу "A" полого участка вала 1 жестко прикреплен нижний конец торсиона 19, верхний конец которого жестко соединен со стержнем 20, расположенным горизонтально и своими концами соединенным жестко со втулкой 21. Стержень 20, располагаясь горизонтально, проходит через два цилиндрических отверстия полого участка вала 1, ось которых перпендикулярна оси вала 1, а диаметр отверстий допускает относительный разворот стержня 20 и вала 1 на углы ±3o. Ленточный торсион 19 имеет длину -200 мм и поперечное сечение b=4 мм, h= 0,2 мм. Втулка 21 полая, подвешена в корпусе стенда на двух шарикоподшипниках 22. Внутри втулки 21 размещен торцевой упругий токоподвод 23 (на фиг. 1 размещение токоподвода 23 показано условно, на фиг. 3 это размещение соответствует конкретному исполнению).
Токоподвод 23 состоит из двух колодок из гетинакса, имеющих "n" отверстий (n= 48), расположенных на окружностях одного и того же радиуса друг против друга, через отверстия проходят золотые проволочки (диаметром 0,05 мм), концы которых закрепляются на торце каждой колодки. Конструкции таких торцевых упругих токоподводов широко используются в гироскопическом приборостроении для подвода питания к элементам на осях карданова подвеса гироприборов ["Гироскопические системы", ч. III "Элементы гироприборов" под ред. Пельпора Д. С., М., "Высшая школа", 1972, стр. 432] [5]. В КБ П.О. "Корпус" имеется разработанная конструкция такого токоподвода на 48 линий [КХ6.629.091].
Верхняя колодка токоподвода 23 жестко связана с валом 1, нижняя колодка токоподвода 23 жестко соединена со втулкой 21. Со втулкой 21 жестко соединена втулка кольцевого многодорожечного коллектора 24, на которой выполнены золоченые кольцевые контактные дорожки. Щетки коллектора 24 жестко связаны с корпусом стенда. Конструкция коллекторов описана в литературе [5]; в КБ П.О. "Корпус" применяются коллекторы 6В4.833.005 (число цепей 50), 6В4.833.007 (число цепей 46). С втулкой 21 соединено зубчатое колесо - выходное звено механизма отслеживания 25, содержащего одну зубчатую передачу с коэффициентом передачи i=10 и шаговый двигатель. В качестве шагового двигателя механизма отслеживания 25 применен шаговый двигатель ДШИ-200-1 Я2МЗ.595.030-01 Я2.МЗ.595.057 ТУ, реверсивный с электронным управлением, большим моментом на валу (2500 гсм без учета редукции) и магнитной фиксацией заданного углового положения (схема и работа шагового двигателя рассматриваются ниже). Конструкция и принцип действия таких шаговых двигателей описаны в литературе [В. В. Хрущев. "Электрические машины систем автоматики", Л., "Энергоиздат", 1985 г. , стр. 324, стр. 4-11] [6]; [Ф.М. Юферов. "Электрические машины автоматических устройств", М. , "Высшая школа", 1976 г., стр. 302] [7]. Механизм отслеживания 25 крепится к корпусу стенда через амортизирующую резиновую прокладку 26. На нижней колодке токоподвода 23 закреплены два геркона (герметичных контакта) 27, на верхней колодке токоподвода закреплен магнит 28. Герконы 27 расположены так, что контакты расположены по радиусам окружности, угол между контактами равен 6o. Магнит 28, закрепленный на верхней колодке токоподвода 23, находится в среднем положении между контактами. Магнит 28 и пара герконов 27 предназначены для регистрации углов рассогласования положений верхней и нижней колодок токоподвода 23 в пределах ±3o. Помимо тангенциальных акселерометров 5 с усилителями обратной связи 13, трех центробежных акселерометров 6 с усилителями обратной связи 13, ДУСа 7 - на платформе 8 закреплен двухканальный суммирующий усилитель 29, предназначенный для дополнительного усиления выходных сигналов акселерометров и выполнения операции усреднения информации центробежных акселерометров (в канале I) и тангенциальных акселерометров (в канале II). В усилителе 13 нагрузочный резистор R'' имеет два выхода. Выход "2" резистора R'' и с каждого из трех тангенциальных акселерометров 5 соединен с соответствующим входом: 1т (для тангенциального акселерометра 1т), входом 2т (для тангенциального акселерометра 2т), входом 3т (для тангенциального акселерометра 3т) усилителя 29 (канал 11).
Выход "2" резистора R''н каждого из трех центробежных акселерометров 6 соединен с соответствующим входом усилителя 29 (канал 1); а именно: с входом 1ц (для центробежного акселерометра 1ц), с входом 2ц (для центробежного акселерометра 2ц), с входом 3ц (для центробежного акселерометра 3ц). Усилитель 29 размещен на платформе 8 для того, чтобы через коллектор 24 передавались небольшие по величине выходные сигналы акселерометров 5,6.
(Выходные сигналы акселерометров 5, 6 имеют порядок 10 мкВ-10 мВ). Все остальные электронные блоки стенда расположены вне подвижной части - платформы 8. Двухканальный усилитель 29 построен на двух суммирующих усилителях, выполненных на базе операционного усилителя с коэффициентом передачи входного сигнала, равным 1/3, т.е. с обеспечением суммирования и усреднения выходных сигналов 3-х тангенциальных акселерометров 5, аналогично, суммированием и делением на 3 выходных сигналов 3-х центробежных акселерометров 6, т.е. суммированием и усреднением выходной информации центробежных акселерометров. Усилитель 29 имеет 6 входов (по двум каналам) и два выхода. Для съема информации с акселерометров 5, 6 и ее обработки введены реле 30, транзисторный ключ 31, плата портов ввода-вывода 32, вставляемая в слот ПЭВМ 33, аналого-цифровой преобразователь 34, также выполненный в виде платы, вставляемой в слот ПЭВМ 33.
Реле 30 имеет две пары контактов, коммутирующих линии, подключенные к его входам 1 и 2; вход 1 реле 30 соединен с выходом 3 усилителя обратной связи ДУС 7, вход 2 реле 30 соединен с выходом 1 усилителя 29. Вход 3 реле 30 (для подачи напряжения управления) соединен с выходом транзисторного ключа 31. В качестве реле 30 применено реле РЭС-55. Транзисторный ключ 31 предназначен для выработки напряжения питания реле 30. Вход транзисторного ключа 31 соединен с выходом платы портов ввода-вывода 32, которая представляет собой, например, три 8-разрядных порта ввода-вывода (используется один порт) цифровой информации.
В качестве платы 32 может быть применена плата ЛА-55Д разработки фирмы "Руднев-Шиляев", материалы разработки и описание опубликованы: Руднев И., Шиляев С. "Платы сбора данных", М., "Мир", ПК, 1993, N3 [10]. Плата ЛА-55Д вставляется в слот ПЭВМ 33 типа IBM AT/PC.
Выход 1 усилителя 29 соединен с входом 1 АЦП 34, выход 2 усилителя 29 соединен с входом 2 АЦП 34, с входом 3 АЦП 34 соединен выход 2 усилителя обратной связи 17 ДУС 7. Выход испытуемого прибора 4 соединен с входом 4 АЦП 34. АЦП 34 имеет, таким образом, 4 входа и 4 выхода: представляет собой 24-разрядный АЦП, имеющий 4 синхронных дифференциальных канала. В качестве АЦП 34 применена плата ЛА-И24 разработки фирмы "Руднев-Шиляев" (см. Шиляев С. и др. "Динамические параметры аналогово-цифрового канала в реальных условиях его применения", "Метрология", приложение к журналу "Измерительная техника", 1993, N5 [11]). Плата ЛА-И24 вставляется в слот ПЭВМ IBM AT/PC-33.
Для управления двигателем 18 служит усилитель системы стабилизации 34, в состав которого входит сумматор 35, имеющий 3 входа и 1 выход. Сумматор 35 выполнен на базе операционного усилителя. На фиг. 4 представлена структура усилителя системы стабилизации 34 и его связи с двигателем 18. Усилитель содержит преобразователь 36 и два идентичных усилителя мощности 37, 38. Преобразователь 36 представляет собой устройство для модуляции и усиления постоянного сигнала, выполненное на базе операционного усилителя с применением в качестве ключевых элементов полевых транзисторов. Пример такого преобразователя приведен в книге Е.А. Фабрикант, Л.Д. Журавлева. "Динамика следящего привода", М., "Машиностроение", 1984, стр. 73 [12].
Каждый из усилителей 37, 38 представляет собой соединение устройств для детектирования, коррекции и усиления сигналов, т.е. состоит из модулятора, корректирующего устройства, и усилителя мощности, реализованных на операционных усилителях с отрицательной обратной связью. Такие схемы описаны в той же книге [12].
Усилитель системы стабилизации 34 и двигатель 18 соединены следующим образом. Вход преобразователя 36 соединен с выходом сумматора 35. Вход преобразователя 36 является первым входом усилителя стабилизации 34. Выходы усилителя стабилизации 34:
первый выход - это выход преобразователя 36, который связан с обмоткой возбуждения C1-C2 ДП двигателя 18 (первым входом двигателя 18);
второй выход - это выход усилителя мощности 37, который соединен с синусной обмоткой C1-C2 ДП двигателя 18(вторым входом двигателя 18);
третий выход - это выход усилителя мощности 38, который соединен с косинусной обмоткой ДБ двигателя 18 (третьим входом двигателя 18).
Второй вход усилителя стабилизации 34 есть вход УМ1-37. Этот второй вход усилителя стабилизации 34 соединен с первым выходом двигателя 18, а именно с синусной обмоткой CЗ-C4 ДП двигателя 18.
Третий вход усилителя стабилизации 34 - это вход УМ2-38. Этот третий вход соединен со вторым выходом двигателя 18, а именно, с - косинусной обмоткой C5-C6 ДП двигателя 18.
Первый вход сумматора 35 соединен с выходом 2 усилителя 29, второй вход сумматора 35 соединен с выходом реле 30 (т.е. подключается к коммутируемым линиям 1-го и 2-го входов реле 30), третий вход сумматора 35 соединен с выходом источника калиброванных напряжений 39 (ИКН).
ИКН 39 предназначен для задания входного эталонного напряжения, определяющего задаваемую стендом угловую скорость.
Выход сумматора 35 соединен с входом преобразователя 36, входящего в состав УСТ 34, соединение которого с двигателем 18 пояснено выше. Таким образом, выход сумматора 35 соединен с двигателем 18.
Для управления шаговым двигателем механизма отслеживания 25 служит блок управления механизмом отслеживания (БУМО) 40, имеющий 2 входа и 4 выхода. Входы блока БУМО 40 соединены, соответственно, с левым герконом (ЛГК) и правым герконом (ПГК). Выходы блока БУМО 40 соединены с обмотками шагового двигателя механизма отслеживания 25.
На фиг. 5 представлена структурная схема блока управления механизмом отслеживания 25.
Блок управления механизмом отслеживания (БУМО) 40 содержит триггер направления вращения 41, оба входа которого соединены, соответственно, с левым и правым герконами 27. На входах триггера 41 подключены шунтирующие резисторы 42 (R1 и R2) для исключения ложных срабатываний триггера 41 при разомкнутых герконах. Триггер 41 предназначен для того, чтобы удерживать во времени импульс от геркона 27 до прихода следующего импульса сброса. В качестве триггера применяется Л-триггер со сбросом и установом, например, КР1533ТВ9 (см. "Справочник логические ИС КР1533, КР1534, ч. 2, под ред. Петровского И. Х., М., "Бином", 1993, стр. 308 [13]).
Выходы триггера 41 соединены с входами формирователя фазовых импульсов 43, еще один вход которого соединен с выходом генератора импульсов 44. Генератор импульсов 44 выполнен на базе микросхемы КР1006ВИ1. Формирователь фазовых импульсов 43 выполнен на реверсивных счетчиках серии 530, усилитель мощности 45 выполнен на транзисторе КТ807.
В КБ ПО "Корпус" разработаны схемы формирователя фазовых импульсов, усилителя мощности, генератора импульсов и триггера направления вращения, объединенных в блок управления механизмом отслеживания ИУНЕ-Э5376. Четыре выхода формирователя фазовых импульсов 43 соединены с четырьмя входами усилителя мощности 45, четыре выхода последнего соединены с обмотками Ан, Бн, Вн, Гн шагового двигателя механизма отслеживания 25. Резисторы R3, R4 - балансировочные. Предлагаемый стенд работает следующим образом.
Режим контроля масштабного коэффициента ДУС
От источника калиброванного напряжения 39 на третий вход сумматора 35 подают напряжение U, пропорциональное угловой скорости ωo, которую необходимо задать. Поскольку на первый и второй входы сумматора 35 напряжение еще не поступало, то это же напряжение U с выхода сумматора 35 поступает на вход преобразователя - 36, который вырабатывает модулирующие напряжения, подаваемые на вход двигателя 18, а именно на обмотку C1-C2 ДП.
При появлении напряжения на обмотке C1-C2 в выходных обмотках CЗ-C4 и C5-C6 индуцируются напряжения Uдп1=UmaxsinQ и Uдп2=UmaxcosQ, Q=n ϕ, где ϕ - относительный угол разворота ротора ДП относительно статора; n - число пар полюсов.
Эти напряжения усиливаются и корректируются усилителями 37, 38, после чего поступают на обмотки C1-C2 и CЗ-C4 ДБ. Суммарный момент, действующий на ротор двигателя 18, равен сумме моментов, развиваемых обеими обмотками ДБ:
где k - коэффициент крутизны характеристики ДБ, Φmax- максимальное значение магнитного потока, J - средняя величина тока в ДБ 18.
Двигатель 18 развивает момент, начинается вращение вала 1 с угловой скоростью ω. Угловая скорость ω действует вдоль оси вала 1. Если ω постоянна, т. е. ω = ωo, то угловое ускорение e = 0, тангенциальное линейное ускорение равно нулю, и напряжение Uaτ на всех трех выходах 1т, 2т, 3т усилителя 13 обратной связи тангенциальных акселерометров 5 равно нулю. При этом корректирующее напряжение на первый вход сумматора 35 не подается. На выходах 1ц, 2ц, 3ц усилителя 13 обратной связи центробежных акселерометров 6 возникает напряжение Uцб, пропорциональное квадрату угловой скорости ωo. Действительно, оси чувствительности центробежных акселерометров 6 ориентированы вдоль радиуса R2 платформы 8, т.е. на чувствительный элемент акселерометров 6 действует центробежное линейное ускорение aцб=ω2R2 (ускорение силы тяжести не дает выходного сигнала из-за принятой ориентации акселерометра). В соответствии с известным принципом работы маятникового акселерометра с обратной связью имеем:
ml=КдмIос (1),
где ml - маятниковость (г•см), Kдм - крутизна характеристики датчика момента 12 акселерометра, Iос - ток в цепи обратной связи.
Откуда Iос=ml/Kдм - при действии одного g.
При действии aцб= ω2 R2 ток обратной связи равен:
Ioc= (mlω2R2/Kдмg) (2)
Выходное напряжение Uцб, снимаемое с выходов 1ц, 2ц, 3ц, равно:
Откуда ω2 R2=(UцбKдмg)/mlR''н (4)
Напряжения Uцбi (i = 1ц, 2ц, 3ц) поступают с выходов трех центробежных акселерометров 6 на входы канала 1 усилителя 29, в котором за счет использования схемы суммирующего усилителя с коэффициентом передачи 1/3, осуществляется операция усреднения информации трех центробежных акселерометров 6 и формируется выходное напряжение Uцб=(Uцб1+Uцб2+Uцб3/3, которое подается на вход 1 АЦП 34 и далее в ПЭВМ, а также на вход 2 реле 30, на котором эта информация готова к использованию, но само использование начинается только после выполнения ПЭВМ следующих функций. ПЭВМ вычисляет угловую скорость ω по информации, поступившей с АЦП 34, и через плату ввода-вывода 32 и транзисторный ключ 31 формирует команду в виде напряжения, подаваемого на обмотку реле 30, реализующего алгоритм:
если ω ≤ 30o/с, то цепь реле по входу 2 разомкнута, а по входу 1 замкнута, информация центробежных акселерометров не используется,
если ω ≥ 30o/с, то цепь реле по входу 2 замкнута, по входу 1 разомкнута, информация центробежных акселерометров используется.
Для управления двигателем 18 на входы сумматора 35 поступают управляющие воздействия: в диапазоне 1 (до 30o/с) от гироскопического датчика угловой скорости 7 и тангенциальных акселерометров 5, в диапазоне 11 (свыше 30o/с) - от тангенциальных 5 и центробежных 6 акселерометров. Таким образом, ПЭВМ осуществляет коммутацию чувствительных элементов в зависимости от величины угловой скорости вращения платформы.
В диапазоне 1 управление осуществляется по сигналам ДУС 7 и тангенциальных акселерометров, в диапазоне 11-по сигналам центробежных и тангенциальных акселерометров 5 и 6.
Гироскопический датчик угловой скорости (ДУС) 7 измеряет угловую скорость ω, действующую по его оси чувствительности, параллельной оси вращения вала 1. По цепи обратной связи ДУС 7 течет ток, пропорциональный действующей угловой скороти ω.
Hω = K
(Е.А. Никитин, А.А. Балашова. "Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров", М., "Машиностроение", 1969, стр. 39 [15] ). С выходов 2 и 3 усилителя обратной связи 17 ДУС 7 снимается напряжение, пропорциональное току обратной связи и, следовательно, угловой скорости вращения платформы
UДУС=IосRн, где Rн - нагрузочное сопротивление на выходах 2, 3 УОС 17.
Напряжение UДУС подается на вход 3 АЦП 34 и далее в ПЭВМ 33, где вычисляется в соответствии с (8) величина ω и выдается информация о величине действующей угловой скорости и в зависимости от ее величины формируется по алгоритму, приведенному выше, команда на реле 30. Таким образом, в ПЭВМ вычисление значения угловой скорости, необходимое для выбора диапазона скоростей, в котором осуществляется работа, что соответствует выбору чувствительных элементов системы управления, осуществляется по выходной информации, поступающей (после преобразования в АЦП 34), от центробежных акселерометров 6 и от ДУС 7. После того как коммутация входов реле 30 осуществлена, на сумматор 35 поступает измеренное чувствительными элементами напряжение U, которое сравнивается с заданным напряжением, пропорциональным желаемой (задаваемой) угловой скорости Uзад ≡ ωo.
В сумматоре происходит сравнение измеренного напряжения с заданным, разностный сигнал поступает на вход двигателя 18. Процесс регулирования завершается, когда заданное и измеренное напряжения становятся равны друг другу, при этом процесс не зависит от того, осуществляется работа в диапазоне 1 (по сигналам ДУС 7 и тангенциальных акселерометров 5) либо в диапазоне 11 (по сигналам тангенциальных акселерометров 5 и центробежных акселерометров 6). Пусть при задании на третий вход сумматора 35 напряжения Uзад ≡ ωo вследствие действия помех, как-то: момента сопротивления по оси вала, переменной составляющей выходного сигнала ДУС, или шумовой составляющей выходного сигнала акселерометров 5 и 6, угловая скорость вращения вала 1 окажется непостоянной, т.е. будет существовать угловое ускорение ε = ω°, равное первой производной от угловой скорости ω. На чувствительный элемент тангенциального акселерометра 5 действует линейное ускорение, равное a = eR1, в цепи обратной связи каждого тангенциального акселерометра 5 течет ток, пропорциональный этому линейному ускорению.
С выходов 1т, 2т, 3т усилителей 13 тангенциальных акселерометров 5 снимаются напряжения Uτi, 1т, 2т, 3т. Эти напряжения, пропорциональные одной и той же величине ω°, т.е. угловому ускорению вращения платформы, измеренные тремя тангенциальными акселерометрами, поступают на три входа канала II суммирующего усилителя 29 с коэффициентом передачи 1/3, вследствие чего с выхода 2 того же усилителя снимается усредненное значение напряжения, пропорционального угловому ускорению вращения платформы стенда. Этот сигнал с выхода усилителя 29 поступает на вход 1 сумматора 35, причем при любом режиме работы стенда - в диапазоне 1 и в диапазоне II, при этом усилитель 29 обеспечивает знак подаваемого напряжения такой, чтобы парировалось отклонение фактического значения угловой скорости от ее заданного (желаемого) значения. Тот же сигнал с выхода усилителя 29 поступает в АЦП и далее в ПЭВМ и формирует информацию как об угловом ускорении, так и о мгновенном значении измеренной угловой скорости вращения платформы. Таким образом, роль тангенциальных акселерометров 5, задействованных в системе управления во всех режимах работы стенда, состоит в улучшении качества регулирования за счет обеспечения регулирования не только по величине рассогласования измеренного и заданного значений угловой скорости, но и по величине углового ускорения. Кроме того, тангенциальные акселерометры формируют информацию, выдаваемую ПЭВМ, о величине углового ускорения вращения платформы.
По информационным, выходным сигналам, формируемым ПЭВМ 33, имеем: 1) информацию о величине угловой скорости вращения платформы, полученную по:
- информации ДУС 7 (при ω ≤30o/с),
- информации центробежных акселерометров 6 (при ω >30o/с и до 200o/с).
- информации тангенциальных акселерометров 5 (во всем диапазоне угловых скоростей), т. е. имеется избыточная информация по угловой скорости, повышающая надежность работы стенда;
2) информацию об угловом ускорении вращения платформы стенда;
3) информацию об угле разворота платформы стенда, получаемую на каждом такте опроса путем соответствующих вычислений в ПЭВМ.
С выхода испытуемого прибора 4 через АЦП 34 в ПЭВМ поступает текущая выходная информация, что позволяет ПЭВМ рассчитывать значения масштабного коэффициента прибора 4 как отношение его выходной информации к задаваемой угловой скорости ω.
Рассмотрим работу механизма отслеживания 25, введенного с целью снижения влияния на стабильность задаваемой стендом угловой скорости трения шарикоподшипниковых опор 2 и трения в коллекторе 24.
Исследования, проведенные в КБ ПО "Корпус", показали, что существенную роль в обеспечении высокой стабильности задаваемой угловой скорости играет момент трения в опорах подвеса оси вращения вала 1 и, особенно, момент сопротивления коллектора 24; последний при наличии в нем ~50 цепей имеет порядок ~40-50 г•см; момент трения шарикоподшипниковых опор при нагрузке платформы 3 испытуемым прибором 4 весом 10-15 кг также имеет порядок 20-30 г•см, что снижает стабильность задаваемой угловой скорости.
В предлагаемом стенде суммарный момент сопротивления по оси вращения платформы 3 не превышает 2-3 г•см.
Уменьшение момента сопротивления шарикоподшипниковых опор 2 достигнуто за счет их разгрузки путем введения ленточного торсиона 19.
Исключение влияния момента сопротивления коллектора 24 достигнуто за счет того, что питание к подвижным элементам стенда, закрепленным на валу 1, осуществляется через упругий торцевой токоподвод 23, имеющий угол взаимного относительного разворота подвижной колодки относительно неподвижной ±3o, чему соответствует закручивание золотых проводников, дающее суммарный момент, имеющий порядок десятых долей гсм.
Коллектор 24 смонтирован на своих опорах 22, момент сопротивления коллекторных щеток при перемещении относительно токоведущих колец коллектора и момент сопротивления опор 22 преодолеваются шаговым двигателем механизма отслеживания 25 и к валу 1 не приложены.
К валу 1 приложены моменты: момент трения шарикоподшипников 2, полностью разгруженных от веса прибора 4 (порядок величины момента < 0,5 г•см);
момент скручивания золотых проводников токоподвода 23 при взаимном развороте колодок на ±3o (порядок величины момента < 0,2 г•см), момент скручивания ленточного торсиона при, например, параметрах b= 4 мм, h= 0,2 мм, L= 200 мм, G(модуль сдвига)= 8-103 кг/мм2 и углах закручивания ±3o имеющий порядок ≤ 0,9 г•см.
Суммарный момент сопротивления по оси вращения вала 1 не превышает 2-3 г•см.
Работа механизма отслеживания 25 осуществляется следующим образом. Пусть двигатель 18 приложил к валу 1 момент М (при поступлении с выхода сумматора 35) соответствующего управляющего сигнала. Вал 1 поворачивается, вследствие чего торец "A" трубчатой части вала 1 с жестко закрепленным на торце "A" нижним концом ленточного торсиона поворачивается; конец торсиона, жестко соединенный со стержнем 20, пока неподвижен, т.е. торсион закручивается на угол не больше 3o.
При развороте вала 1 на угол ±3o замыкается левый или правый геркон 27, вследствие того, что магнит 28, закрепленный на верхней колодке токоподвода 23, вращающийся вместе с валом 1, оказывается над контактами соответствующего геркона, что вызывает замыкание контактов геркона (ЛКГ или ПКГ, см. фиг. 5).
Триггер направления вращения 41 (фиг. 5) "удерживает" импульс геркона во времени, что является входным воздействием для формирователя фазовых импульсов 43. Работа генератора импульсов 44, формирователя фазовых импульсов 43 и усилителя мощности 45 пояснена диаграммой на фиг. 6.
Их роль сводится к формированию и подаче на обмотки Ан, Бн, Вн, Гц шагового двигателя (ДШИ-200-1) механизма отслеживания 25 определенной последовательности импульсов, сдвинутых по времени относительно тактовых импульсов (Yт), формируемых генератором 44. В зависимости от последовательности подачи импульсов на обмотки шагового двигателя обеспечивается его вращение в соответствующую сторону, т.е. отслеживание углового положения задающей оси.
Задающей осью является вал 1 (со всеми закрепленными на нем элементами). Отслеживающей осью является ось вращения втулки 21 со всеми закрепленными на ней деталями (нижней колодкой токоподвода 23 с герконами 27, выходным звеном механизма отслеживания, коллекторной втулкой 24). Таким образом, обеспечивается режим "слежения" за совпадением углового положения обеих осей: оси вала 1 (в шарикоподшипниках 2) и оси вращения коллекторной втулки 24 (в шарикоподшипниках 22). Это позволяет обеспечивать подвод питания к элементам, закрепленным на валу 1, через безмоментный упругий токоподвод 23, допускающий угол взаимного разворота колодок не более ±3o, т.е. исключить влияние момента сопротивления коллектора 24 на ось вращения вала 1. В процессе "слежения" за осью вала 1 ленточный торсион 19 закручивается при начале движения оси 1 и раскручивается в процессе разворота оси вращения коллектора. Этот момент, как было показано выше, незначительный. Разгрузка опор 2 вала 1 обеспечивается за счет натяжения торсиона 19, передающего вес платформы 3 с испытуемым прибором 4 через стержень 20 на шарикоподшипники 22 оси вращения коллектора. Возникающий при этом дополнительный момент сопротивления шарикоподшипников 22 "парируется" тем же шаговым двигателем механизма отслеживания 25. В качестве двигателя в механизме отслеживания 25 выбран шаговый двигатель с электронным управлением, т.к. такие двигатели имеют большой момент на валу, высокую точность и, что очень важно, останавливаются в момент окончания управляющего импульса, причем имеют магнитную фиксацию этого положения. Для любого другого типа приводного двигателя механизма отслеживания возникает проблема его останова. На частоте fг равной, например, 1000 Гц, такие шаговые двигатели работают без значительных вибраций. Тем не менее для полного исключения влияния на стенд вибраций шагового двигателя механизм отслеживания 25 установлен на амортизирующей прокладке 26.
Оценим диапазон задаваемых угловых скоростей стенда и минимальные регистрируемые угловые скорости и ускорения. Для серийного кварцевого акселерометра АК-6 порог чувствительности равен 0,5•10-6 g; предел измерения 7 g. Для центробежного акселерометра получаем: Чувствительность акселерометра 0,5•10-6 g или минимально измеряемое линейное ускорение a~0,0005 см/с2. При R2= 15 см ω
Это означает, что тангенциальные акселерометры способны регистрировать минимальное ускорение 0,002o/с2, или нестабильность угловой скорости 0,0002o/с за такт опроса tт= 0,1 с. Для прецизионного стенда этого достаточно. В качестве ДУС 7 в стенде применен прибор КХ79-060, имеющий Kдм= 2 мА/o/с и диапазон измеряемых угловых скоростей ±36o/с. Поэтому в стенде предельная измеряемая по каналу I усилителя 29 угловая скорость определена как 30o/с.
Режим контроля нулевых сигналов испытуемого прибора
В этом случае испытуемый прибор 4 по-прежнему закреплен на платформе 3 стенда, которой не задается движение. Выходная информация прибора 4 через АЦИ 34 поступает в ПЭВМ 33, где регистрируется и обрабатывается.
Режим контроля АЧХ и ФЧХ испытуемого прибора
В этом режиме работа стенда аналогична описанной для режима контроля масштабного коэффициента прибора. Отличие состоит в том, что на вход 3 сумматора 35 вместо постоянного напряжения подается синусоидальное напряжение с фиксированными частотами в диапазоне 1-20 Гц. Платформа 3 совершает синусоидальные колебания.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
Стенд предназначен для использования в измерительной технике. Стенд содержит корпус, вал, закрепленный в корпусе с возможностью вращения, платформу для крепления измерителя на валу, электродвигатель постоянного тока, кольцевой коллектор, источник калиброванного напряжения. Три акселерометра (тангенциальные) закреплены на дополнительной платформе так, что их оси чувствительности перпендикулярны соответствующим радиусам дополнительной платформы, а три акселерометра (центробежные) закреплены на дополнительной платформе так, что их оси чувствительности ориентированы вдоль соответствующих радиусов дополнительной платформы. Гироскопический датчик угловой скорости установлен на дополнительной платформе так, что ось чувствительности параллельна оси вала. Два геркона закреплены на упругом торцевом токопроводе так, что обеспечен угол между контактами герконов 6o. Магнит закреплен в среднем положении между контактами герконов. Цилиндрическая втулка подвешена в корпусе стенда на шарикоподшипниковых опорах соосно с валом, проходящим внутри цилиндрической втулки. Вал выполнен полым на одном участке своей длины, ленточный торсион размещен во внутренней полости вала. Стенд содержит также механизм отслеживания оси вала. Управление стендом и обработка информации осуществляются с помощью ПЭВМ. Обеспечивается повышение точности и стабильности задаваемой угловой скорости, расширение функциональных возможностей стенда и повышение его чувствительности. 6 ил.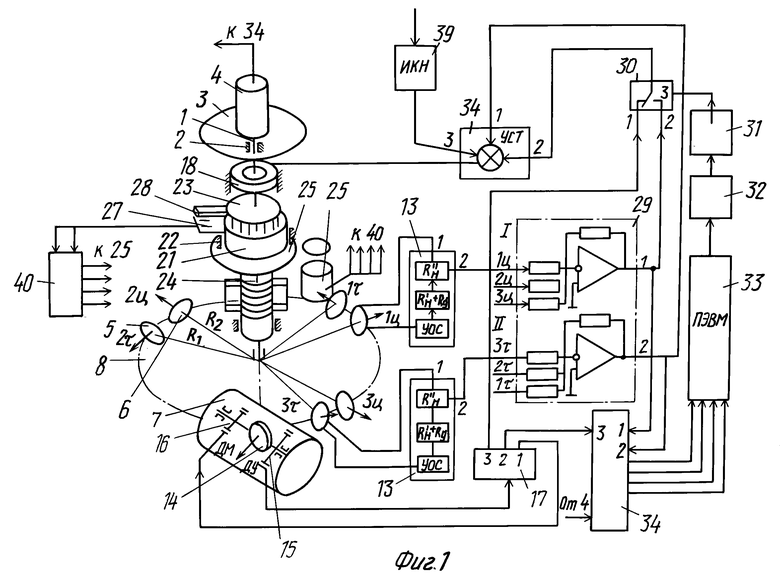
Широкодиапазонный стенд для контроля измерителей угловых скоростей, содержащий корпус, вал, установленный в корпусе с возможностью вращения, закрепленную на валу платформу для установки измерителя угловых скоростей, электродвигатель постоянного тока, кольцевой коллектор, состоящий из коллекторной втулки и щеток для подвода питания, отличающийся тем, что введены дополнительная платформа, закрепленная на валу, шесть кварцевых маятниковых акселерометров, гироскопический датчик угловой скорости, цилиндрическая втулка, стержень, ленточный торсион, упругий торцевой токоподвод, два геркона, магнит, механизм отслеживания, суммирующий двухканальный усилитель, персональная ЭВМ, аналого-цифровой преобразователь, имеющий четыре входа, плата цифровых портов ввода-вывода, двухпозиционное реле и транзисторный ключ, усилитель системы стабилизации с сумматором, входящим в его состав, источник калиброванного напряжения и блок управления механизмом отслеживания, при этом гироскопический датчик угловой скорости и акселерометры закреплены на дополнительной платформе, оси чувствительности трех акселерометров для измерения тангенциального ускорения перпендикулярны соответствующим радиусам дополнительной платформы, а оси чувствительности трех акселерометров для измерения центробежного ускорения ориентированы вдоль соответствующих радиусов дополнительной платформы, каждый акселерометр содержит кварцевую пластину, емкостный датчик угла и
магнитоэлектрический датчик момента, соединенные последовательно через соответствующие усилители обратной связи, имеющие второй выход с нагрузочного резистора, гироскопический датчик угловой скорости содержит датчик угла и датчик момента, соединенные последовательно через усилитель обратной связи, имеющий три выхода, а ось чувствительности гироскопического датчика угловой скорости параллельна оси вала, упругий торцевой токоподвод содержит верхнюю и нижнюю гетинаксовые колодки и золотые проводники подвода питания, прикрепленные к колодкам, два геркона закреплены на нижней колодке с обеспечением угла 6o между контактами герконов, магнит закреплен на верхней колодке в среднем положении между контактами герконов, цилиндрическая втулка подвешена в корпусе на шарикоподшипниковых опорах соосно с валом, проходящим внутри цилиндрической втулки, верхняя колодка упругого торцевого токоподвода закреплена на валу, а нижняя колодка - на цилиндрической втулке, вал выполнен полым на одном участке своей длины, ленточный торсион размещен в полости вала и прикреплен нижним концом к торцу полого участка вала, а верхним концом - к середине стержня, который расположен перпендикулярно оси вала, проходит через отверстия цилиндрического полого участка вала и прикреплен двумя концами к торцам цилиндрической втулки, жестко соединенной с коллекторной втулкой, механизм отслеживания содержит импульсный шаговый двигатель и зубчатую передачу, при этом шаговый двигатель прикреплен к корпусу через амортизатор, выходное звено зубчатой передачи закреплено на цилиндрической втулке соосно с ней, суммирующий двухканальный усилитель имеет в каждом канале три входа и один выход, а его
коэффициент передачи по каждому входу 1/3, аналого-цифровой преобразователь и плата цифровых портов ввода-вывода встроены в слоты персональной ЭВМ, вход транзисторного ключа соединен с выходом платы портов ввода-вывода, а выход - с обмоткой двухпозиционного реле, имеющего два входа, усилитель системы стабилизации с сумматором закреплен на дополнительной платформе, причем сумматор имеет три входа и один выход, блок управления механизмом отслеживания имеет два входа, соединенных с герконами, и четыре выхода, соединенных с обмотками импульсного шагового двигателя, второй выход усилителя обратной связи гироскопического датчика угловой скорости соединен с третьим входом аналого-цифрового преобразователя, четвертый вход которого предназначен для соединения с выходом измерителя угловой скорости, третий выход усилителя обратной связи гироскопического датчика угловой скорости соединен с первым входом реле, три входа первого канала и три входа второго канала суммирующего двухканального усилителя соединены соответственно с выходами с нагрузочных резисторов акселерометров для измерения центробежных ускорений и акселерометров для измерения тангенциальных ускорений, первый выход суммирующего двухканального усилителя соединен с первым входом аналого-цифрового преобразователя и вторым входом реле, второй выход суммирующего двухканального усилителя соединен с вторым входом аналого-цифрового преобразователя и первым входом сумматора усилителя системы стабилизации, выход коммутируемых линий реле соединен с вторым входом этого сумматора, его третий вход соединен с выходом источника калиброванного напряжения, а его выход -
с первым входом усилителя системы стабилизации, первый, второй и третий выходы усилителя системы стабилизации соединены с первым, вторым и третьим входами электродвигателя постоянного тока, первый и второй выходы которого соединены с вторым и третьим входами усилителя системы стабилизации, при этом электродвигатель постоянного тока выполнен бесконтактным.
| Стенд угловых скоростей и ускорений | 1973 |
|
SU459735A1 |
| Устройство для определения масштабного коэффициента компенсационного измерителя угловой скорости | 1973 |
|
SU476516A1 |
| Стенд угловых скоростей и ускорений | 1983 |
|
SU1136085A1 |
| Устройство для воспроизведения малых угловых скоростей | 1990 |
|
SU1720023A1 |
| Устройство для воспроизведения малых угловых скоростей | 1991 |
|
SU1793385A1 |

