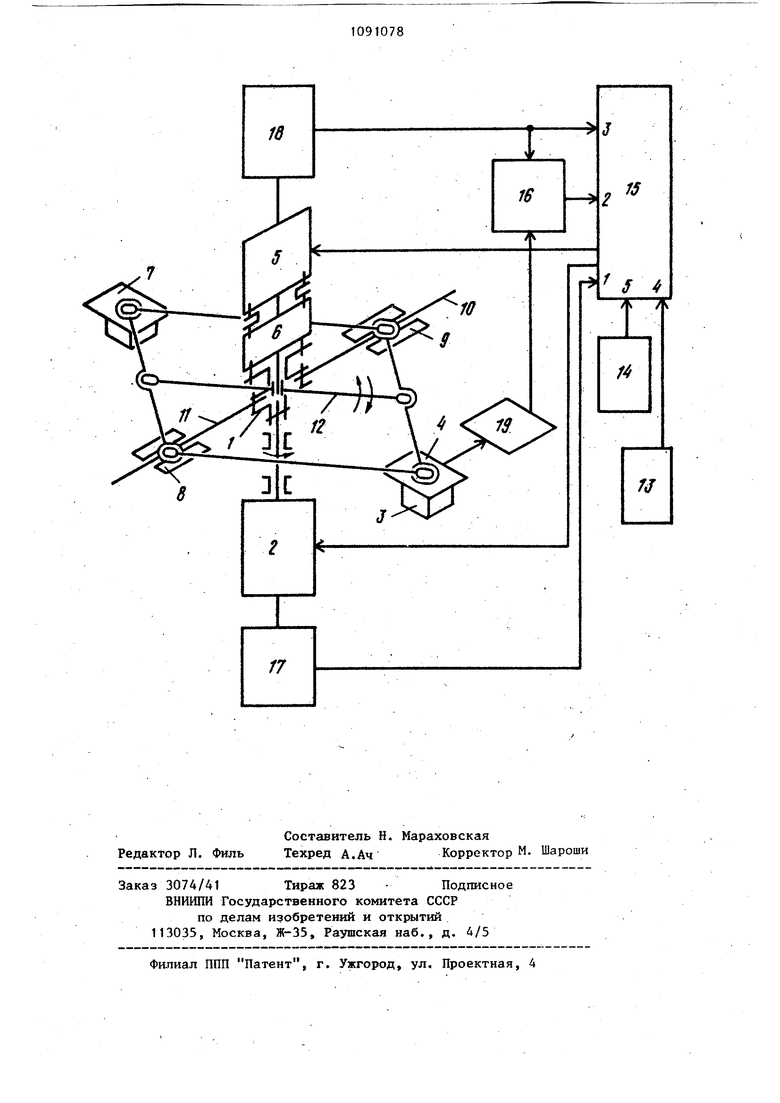
00 Изобретение относится к испытате ной технике и предназначено для динамических испытаний, например, нав гационных систем и приборных устройств, контролирующих параметры дн женин различных объектов. Известны центробежною испытатель ные стенды, на которых возможно вос производить линейные ускорения, изменяющиеся по заданной программе, путем программного изменения радиус вращения испытуемого изделия с помо щью дополнительного привода l. В силу особенностей конструкции на одних невозможно обеспечить требуемую точность испытательного воздействия из-за дискретнс(го уравновешивания центробежной силы, действующей на испытуемое изделие, на др гих невозможно воспроизводить ускорение с высокой интенсивностью (свы ще 10000 мс Наиболее близким к предлагаемому по технической сущности является центробежный стенд, содержащий вращающуюся платформу с приводом, допо нительный привод для программного перемещения кареток через редуктор, рычаг и четырехзвенный механизм, систему управления приводами 2J. Недостатком известного стенда является относительно низкая точность воспроизведения заданного программного испытательного воздействия из-за неспособности системы управления компенсировать динамиче кую ошибку движения, вызванную наличием податливости передаточного механизма (редуктора - привода радиального перемещения). Цель изобретения - повышение точ ности воспроизведения заданного про раммного воздействия. Указанная цель достигается тем, что в центробежный испытательный , стенд, содержащий вращающуюся платформу с приводом, дополнительный привод для программного перемещения кареток через редуктор, рычаг и чет рехзвенный механизм, систему управления приводами, введены два датчика положения и коммутирующий элемен соединяющий их с ситемой управления приводами, причем подвижная часть первого датчика положения жестко соединена с валом дополнител ного привода, а второго датчика положения - с одной из кареток. 82 На чертеже показана схема предлагаемого центробежного стенда. Стенд срдержит платформу 1, приводимую во вращение основным электродвигателем (Д1) 2. Испытуемое изделие 3 устанавливается в рабочую каретку 4, которая перемещается в. радиальном направлении установленньм на платформе дополнительным электродвигателем (ДИ) 5 устройства радиального перемещения с помощью входящих в него редуктора (Р) 6 и шарнирного рычажного механизма, связыаакяцего с кареткой 4 вторую каретку 7 и противовесы 8 и 9, перемещающиеся по радиальным направляющим 10 и 11, закрепленным на платформе 1, при повороте ведущего рычага 12, жестко связанного с выходным валом редуктора 6. Система управления стендом включает в себя источники 13 и 14 программно-задаваемых сигналов управления (И1, ИИ), блок 15 управления (БУ) и коммутирующий элемент (КЗ) 16, а также датчики углового движения 17 (ДУ1) и 18 (ДУН) дополнительного электродвигателя 5 и датчик 19 радиального перемещения (ДП) каретки 4. Выход ДУ1 17 непосредственно связан с первым входом БУ 15, выходы ДУН 18 и ДП 19 связаны с вторым и третьим входами БУ 15 соответственно.прямо и через КЭ 16. Четвертый и пятый входы БУ 15 связаны с выходами соответственно И1 13 и ИИ 14, выходные сигналы БУ 15 подаются на электродвигатели Д1 2 и ДИ 5. Стенд работает следующим образом. Задающие сигналы управления Ц)1(ь) и Ujjji (t) поступают от источников И1 13 и ИИ 14 на четвертый и пятый входы БУ 15, где они складыватся с дополнительными управляющими сгигналаш U (,t) и ), сформированными с помощью обратных связей по соотношениям: U(t).p)f,(i)-Y,,p(i), (.1+/2.р)1:Уз1 ЬУзпр{ 1 Я1 рзр)(t)-V3lt), гдeУ4r,p(t) программа углового движения привода главного вращения Д1 2, ПпИ программа углового движения вспомогательного йривода радиального перемещения каретки Д115, Y (t) - реальньй закон угловог движения вала Д1 2, Y (t) - реальный закон угловог движения.вала Д11 5 и входного вала редуктора Р 6, f(j (t) - реальный закон угловог движения жестко связан ного с кареткой 4 веду щего рычага 12 и выход ного вала редуктора Р ,)f( коэффициенты усиления cf программные движения Vinp (t) и Ijnft (t) формируются в БУ 15 из задающих сигналов управления Uo4(t) и U)(t). Информация о реальных движениях V (t), (t),fs (t) поступает соответственно с датчиков ДУ1 17, ДУН 18 и ДП 19. Дополнител ный управляющий сигнал U (t) формируется непосредственно в БУ 15. Дополнительный управлякяций сигнал U(t) состоит из двух слагаемых. Пе вое из них согласно (1) формируется стандартной отрицательной обратной связью в БУ 15 и предназначено для компенсации рассогласования между реальным движением вала ДП 5 и его программным движением. Второе слагаемое формируется с помощью КЭ 16 дополнительной положительной связью и предназначено для компенсации вли ния податливости редуктора 6. I Введение дополнительной рбратной связи противоположного знака приводит к тому, что при движении каретки 4 со скоростью, меньшей программного значения, положительная обратная связь вызьтает уменьшение величины управляющего сигнала на электродвигателе радиального перемещения каретки ДП 5, что обеспечивает уменьшение скорости вращения его вала и уменынение упругого закручивания входного вала редуктора 6 относительно его выходного вала, связанного с кареткой, и составлякщая динамической ошибки движения каретки, вызванная наличием податливости, уменьшается. Возникшее при этом рассогласование скорости вращения вала ДП 5 с программой fjnf) компенсируется стандартной обратной отрицательной связью (первое слагаемое в вьфажении для U( (t). Соотношения между величинами коэффициентов усиления dt 4 i устанавливаются из анализа устойчивости систем. Таким образом, введение дополнительной положительной обратной связи для компенсации податливости передаточного механизма в совокупности с отрицательной обратной связью для отработки программного движения приводит к снижению величины динамической ошибки движения каретки с испытуемым изделием, а это повышает точность воспроизведения программных испытательных воздействий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Центробежный стенд | 1982 |
|
SU1037188A1 |
| СИСТЕМА ИМИТАЦИИ НЕВЕСОМОСТИ МНОГОЗВЕННЫХ МЕХАНИЗМОВ | 2008 |
|
RU2402470C2 |
| Центробежный стенд | 1982 |
|
SU1030736A1 |
| Центробежный стенд | 1977 |
|
SU708235A1 |
| УСТРОЙСТВО ИМИТАЦИИ НЕВЕСОМОСТИ МЕХАНИЗМОВ С ГИБКОЙ КОНСТРУКЦИЕЙ ЭЛЕМЕНТОВ | 2006 |
|
RU2334970C2 |
| Стенд для испытания гидравлических фрикционных муфт коробки передач | 1983 |
|
SU1139991A1 |
| Стенд для динамических испытаний изделий | 1990 |
|
SU1781579A1 |
| Центробежный стенд для испытания изделий на воздействие переменных линейных ускорений | 1990 |
|
SU1775635A1 |
| Стенд для испытания изделий на ударные нагрузки | 1979 |
|
SU871011A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ИЗДЕЛИЙ НА ВОЗДЕЙСТВИЕ ИНТЕНСИВНО ИЗМЕНЯЮЩИХСЯ УСКОРЕНИЙ | 1990 |
|
RU2068991C1 |
ЦЕНТРОБЕЖНЫЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД, содержащий вращающуюся платформу с приводом, дополнительный привод для программного перемещения кареток через редуктор, рычаг и четырехзвенный механизм, систему управления рриводами, отличающийс я тем, что, с целью повышения точности воспроизведения заданного программного воздействия, в него введены два датчика положения и коммутирующий элемент, соединяющий их с системой управления приводами, причем подвижная часть первого датчика положения жестко соединена с валом дополнительного привода, а второго датчика положения - с одной из кареток. (Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Центробежный испытательный стенд | 1973 |
|
SU524094A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Центробежный стенд | 1977 |
|
SU708235A1 |
| G | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| . | |||
