Устройство имитации невесомости относится к испытательной технике, в частности к наземным испытаниям механизмов, имеющих гибкую конструкцию, рассчитанную на работу в невесомости. Изобретение может быть использовано для обезвешивания элементов гибкой конструкции для устранения ее деформации или разрушения под действием силы земного тяготения при наземных испытаниях конструкции (экспериментального уточнения или идентификации параметров математической модели конструкции механизмов на Земле) или при физической отработке и проверке работы системы управления на Земле до проведения летных испытаний.
Известно обезвешивающее устройство (см. заявку №98104331 RU, G01M 1/00, 1998 г.). Оно выполнено в виде двуплечего рычага, шарнирно закрепленного в точке равновесия, на одном конце которого закреплен обезвешиваемый объект, а на другом - уравновешивающий груз, плечи рычага выполнены раздвижными и кинематически связанными. Возможно снабжение устройства вертикальной осью вращения, установление в подвесе испытываемого объекта датчика ошибки разгружающей силы и гироскопического датчика отклонения подвеса от вертикали. Обезвешивающее устройство может содержать несколько двуплечих рычагов.
Недостатком является невозможность измерения характеристик обезвешиваемой конструкции (моментов сопротивления, весовой составляющей, скорости перемещения подвижных элементов, усилий в структуре конструкции).
Известно "Устройство обезвешивания элементов" (см. патент SU 1828261 А1, G01M 19/00, 20.09.1996).
Оно содержит шестистепенное газостатическое устройство подвеса, включающее, например, сферическую газостатическую опору, плоскую газостатическую опору, подпятник, которой находится в камере с газом, и следящую систему по поддерживанию заданного давления газа, в которую входят последовательно соединенные датчик давления, блок управления и исполнительный орган по регулировке давления; три следящие системы, обеспечивающие перемещение шестистепенного газостатического устройства подвеса соответственно по вертикали и в плоскости горизонта, причем следящая система по вертикали содержит привод вертикального перемещения, соединенный через блок управления с датчиком относительного вертикального перемещения подпятника плоской газовой опоры относительно корпуса камеры с газом, а два привода для горизонтального перемещения соединены через соответствующий блок управления с соответствующим датчиком, измеряющим относительное горизонтальное перемещение обезвешиваемого элемента конструкции относительно подпятника плоской газовой опоры.
Недостатком данного устройства является сложность конструкции.
В качестве прототипа выбран "Стенд для моделирования невесомости двухзвенных механизмов" (см. патент SU 1467418 A1, G01M 13/02, 23.03.1989).
Он содержит основание с двумя параллельными прямолинейными направляющими, в них установлены четыре каретки с роликами, шкивы, установленные по два на каждой каретке, два основных гибких элемента, охватывающих шкивы кареток с образованием петли, и установленные в каждой петле подвижные блоки. Каретки установлены по две в каждой направляющей так, что каждые две взаимно противоположные каретки и принадлежащие им подвижные блоки образуют единую подвеску, предназначенную для присоединения через соединительные элементы к центру масс соответствующего звена или испытываемого механизма. Звенья соединены между собой и с основанием приводом. Два дополнительных гибких элемента жестко связаны каждый с соответствующей парой кареток, установленных в одной направляющей, а стенд снабжен двумя уравнительными механизмами, включающими в себя каждый электродвигатель с редуктором, установленным на выходном валу редуктора регулировочный шкив и фрикционную муфту с пружиной и гайкой. Одни концы основных гибких элементов закреплены на основании, а другие их концы через дополнительный подвижный блок, закрепленный на первом противовесе, закреплены на барабане, установленном на основании. На одной из кареток установлено устройство управления соответствующим электродвигателем, включающее в себя кронштейн с управляющим стержнем, установленные на концах кронштейна ролики, охваченные соответствующим гибким элементом, и два концевых электровыключателя, предназначенные для взаимодействия с управляющим стержнем. Два дополнительных гибких элемента включены в состав второго уравнительного механизма, поэтому один из них охватывает регулировочный шкив второго электродвигателя. Одни концы этих гибких элементов присоединены ко второму (общему) противовесу, а другие их концы присоединены к соответствующим противовесам. Электродвигатель, входящий в первый уравнительный механизм и взаимодействующий с гибкими элементами, электрически связан через разъем с приводами звеньев испытываемого механизма и получает управляющий сигнал на направление вращения от их системы управления. А электродвигатель второго уравнительного механизма, взаимодействующий с гибкими элементами, электрически связан с концевыми выключателями устройства управления, установленного на одной из кареток. Под действием своих приводов звенья испытываемого механизма перемещаются в вертикальной плоскости.
Недостатком прототипа является сложность конструкции, невозможность измерения характеристик обезвешиваемой конструкции (моментов сопротивления, весовой составляющей, скорости перемещения подвижных элементов, усилий в структуре конструкции).
Целью изобретения является упрощение конструкции при создании возможности имитации невесомости для подвижных элементов конструкций и определении характеристик подвижных элементов конструкции, предназначенных для работы в состоянии невесомости в наземных условиях.
Указанная цель достигается тем, что в устройстве имитации невесомости элементов гибкой конструкции с неограниченным количеством звеньев, содержащем электропривод вертикального перемещения, связанный с обезвешиваемым элементом гибкой связью, проходящей через каретку с нагрузочной ячейкой, служащей для определения усилия натяжения гибкой связи, перемещающуюся по направляющей, нагрузочная ячейка, связана с электроприводом вертикального перемещения через блок управления, который в свою очередь связан с электроприводом горизонтального перемещения через датчик, определяющий вертикальное положение гибкой связи и расположенный на каретке, при этом блок управления состоит из микроконтроллера и персонального компьютера.
Анализ известных технических решений в исследуемой области позволяет сделать вывод об отсутствии в них признаков, сходных с существенными отличительными признаками заявляемого устройства и признать заявляемое решение соответствующим критерию "изобретательский уровень".
Сущность изобретения поясняется чертежом.
На чертеже схематически изображено предлагаемое устройство имитации невесомости.
Обезвешиваемый элемент 1 связан гибкой связью 2 с электроприводом вертикального перемещения 3. Гибкая связь 2 проходит через каретку 4, имеющую в составе нагрузочную ячейку 5 для определения усилия натяжения гибкой связи 2. Каретка 4 перемещается по направляющей 6. Электропривод горизонтального перемещения 7 каретки 4 в совокупности с датчиком угла 8, отслеживающим вертикальное положение гибкой связи 2, и блоком управления 9 сообщают каретке 4 поступательное движение. Нагрузочная ячейка 5 через блок управления 9 связана с электроприводом вертикального перемещения 3. Блок управления 9 состоит из микроконтроллера, персонального компьютера с соответствующим программным обеспечением, позволяющим создать все необходимые опции управления устройством имитации невесомости.
Предлагаемое устройство имитации невесомости работает следующим образом: блок управления 9 формирует алгоритм работы устройства имитации невесомости путем снятия значения величин весовой составляющей в точках траектории движения обезвешиваемого элемента (при незадействованном механизме, приводящем в действие обезвешиваемый элемент). Снятие весовой составляющей осуществляется с нагрузочной ячейки 5 при работе электропривода вертикального перемещения 3. Одновременно электропривод горизонтального перемещения 7 каретки 4 по команде с датчика угла 8 поддерживает вертикальное положение гибкой связи 2. После формирования значений величин весовой составляющей приводится в действие механизм движения обезвешиваемого элемента 1. Данные с нагрузочной ячейки 5 при задействованном механизме движения обезвешиваемого элемента 1 сравниваются в БУ 9 со значениями величин весовой составляющей при незадействованном механизме движения обезвешиваемого элемента 1 и БУ 9 выдает команду о величине скорости на электропривод вертикального перемещения 3. Одновременно электропривод горизонтального перемещения 7 по команде с датчика угла 8 на блок управления 9 сообщает каретке 4 поступательное движение.
Устройство имитации невесомости ориентировано на различные скорости движения обезвешиваемого элемента 1, а также имеет возможность удерживать элемент (конструкцию в целом) в обезвешенном состоянии.
Устройство имитации невесомости позволяет имитировать процесс движения элементов конструкции, имеющих разную скорость движения в обезвешенном состоянии, путем установки системы на каждый отдельный элемент конструкции. Взаимодействие системы обеспечивается через блок управления 9.
Реализация предлагаемого изобретения позволяет существенно упростить конструкцию устройства имитации невесомости. Использование устройства дает возможность имитации невесомости для подвижных элементов конструкций и определения их характеристик (весовых составляющих, фактических моментов сопротивления индивидуально по каждому элементу обезвешиваемой конструкции в любой точке ее траектории).
В настоящее время на предприятии идут отработочные испытания данного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИМИТАЦИИ НЕВЕСОМОСТИ МНОГОЗВЕННЫХ МЕХАНИЗМОВ | 2008 |
|
RU2402470C2 |
| СИСТЕМА ИМИТАЦИИ НЕВЕСОМОСТИ | 2014 |
|
RU2565807C2 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ГРУЗОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2483997C1 |
| ПОВОРОТНОЕ УСТРОЙСТВО С ТРОСОБЛОЧНОЙ СИСТЕМОЙ ДЛЯ ОБЕЗВЕШИВАНИЯ РАСКРЫВАЕМЫХ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2721448C1 |
| УСТРОЙСТВО ОБЕЗВЕШИВАНИЯ ЭЛЕМЕНТОВ | 1990 |
|
SU1828261A1 |
| Стенд для моделирования невесомости двухзвенных механизмов | 1983 |
|
SU1089452A1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ЭЛЕМЕНТОВ КОСМИЧЕСКИХ АППАРАТОВ ПРИ НАЗЕМНЫХ ИСПЫТАНИЯХ | 2020 |
|
RU2744925C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ (АСТРОНАВТОВ) К ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ (ВАРИАНТЫ) | 2013 |
|
RU2524503C1 |
| Способ проведения модальных испытаний многосегментных нежестких конструкций | 2017 |
|
RU2662255C1 |
| Способ обезвешивания и возбуждения колебаний при модальных испытаниях и устройство для его осуществления | 2017 |
|
RU2677942C2 |
Изобретение относится к испытательной технике и может быть использовано для обезвешивания механизмов с гибкой конструкцией элементов при проведении наземных испытаний механизмов, рассчитанных на работу в невесомости. Устройство содержит электропривод вертикального перемещения, связанный с обезвешиваемым элементом гибкой связью, проходящей через каретку, с нагрузочной ячейкой, служащей для определения усилия натяжения гибкой связи, перемещающуюся по направляющей. При этом нагрузочная ячейка связана с электроприводом вертикального перемещения через блок управления, который, в свою очередь, связан с электроприводом горизонтального перемещения через датчик, определяющий вертикальное положение гибкой связи и расположенный на каретке. Блок управления состоит из микроконтроллера и персонального компьютера. Технический результат заключается в упрощении конструкции и возможности имитации невесомости для подвижных элементов конструкций и определения их характеристик. 1 ил.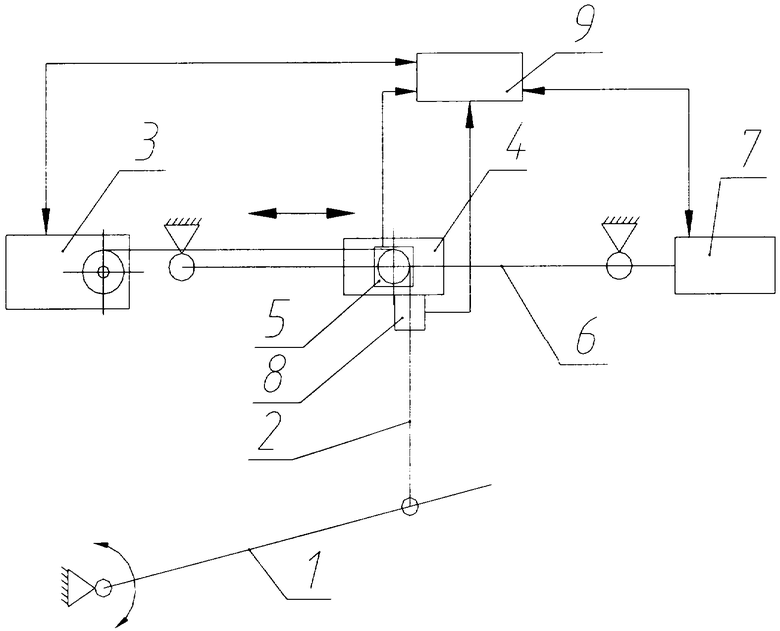
Устройство имитации невесомости механизмов с гибкой конструкцией элементов, содержащее электропривод вертикального перемещения, связанный с обезвешиваемым элементом гибкой связью, проходящей через каретку, с нагрузочной ячейкой, служащей для определения усилия натяжения гибкой связи, перемещающуюся по направляющей, отличающееся тем, что нагрузочная ячейка связана с электроприводом вертикального перемещения через блок управления, который, в свою очередь, связан с электроприводом горизонтального перемещения через датчик, определяющий вертикальное положение гибкой связи и расположенный на каретке, при этом блок управления состоит из микроконтроллера и персонального компьютера.
| Стенд для моделирования невесомости двухзвенных механизмов | 1987 |
|
SU1467418A1 |
| УСТРОЙСТВО ОБЕЗВЕШИВАНИЯ ЭЛЕМЕНТОВ | 1990 |
|
SU1828261A1 |
| Стенд для моделирования невесомости двухзвенных механизмов | 1983 |
|
SU1089452A1 |
| JP 4139000 A, 13.05.1992. | |||

