Изобретение относится к испытательной технике и предназначено для динамических испытаний, например, навигационных приборов, определяющи и контролирующих параметры движения различных объектов. Известен центробежный стенд,на котором возможно воспроизводить про раммные линейные ускорения за счет программного изменения радиуса вращения испытуемого изделия дополнител ным приводом с ij . .. Однако в силу особенности констру ции на этом стенде невозможно воспр изводить ускорения, изменяющиеся с высокой интенсивностью (10.000 м/с и выше) . Наиболее близким по технической сущности к изобретению является тробежный стенд, содержащий платфор му с приводом, направляющие и проти вовесы, связанные друг с другом шарнирным рычажным механизмом, дополни тельный привод радиального перемещения кареток и противовесов, систему регулирования движения приводов, блоки управления 2. Существенным недостатком известного стенда является относительно низкая точность воспроизведения заданного программногоиспытательного воздействия в силу неспособности системы .регулирования, состоящей и-з двух разобщенных блоков управления, каждым из приводов в отдельности компенсировать динамические ошибки движения, порожденных дзаимным влиянием приводов друг на друга. Цель изобретения - повышение точ ности воспроизведения испытательного воздействия. Эта цель достигается за счет того, что в центробежном стенде, содержащем платформу с приводом, на-Ч правляющие и противовесы, связанные друг с другом шарнирным рычажным механизмом, дополнительный привод радиального перемещения кареток и прртивовесов,-систему регулирования Движения приводов, блоки управления в систему регулирования дополнительно введены два блока моделирования программых движений приводов, входы каждого из которых соединены с источ никами программно-задаваемых сигналов управления, а выходы - с соответствующими блоками управления. Ja чертеже показана схема предпагаемого центробежного стенда. Стенд содержит платформу 1, приводимую во вращение основным электро двигателем 2. Испытуемое изделие 3 устанавливается в каретку 4, которая перемещается в радиальном направлении на платформе дополнительным элек тродвигателе м 5 с помощью шарнирного р ычажного механизма, связывающего с кареткой 4 вторую каретку б и противовесы 7 и 8, перемещакадиеся по радиальным направляющим 9 и 10, закрепленным на платформе 1-. Управление приводами стенда осуществляется системой регулирования, состоящей из источников программно- задаваемых сигналов управления 11 и 12, блоков моделирования п юграммных движений первого и второго приводов 13 и 14, блоков управления 15 и 16 соответственно основным 2 и дополнительным 5 электродвигателем. Первые входы блоков управления 15 и 16 связаны с выходами датчиков угловых движений 17 и 18, вторые - с выходами 11 и 12. Первые входы блоков моделирорания программных движений 13 и 14 соединены с выходом источника программно-задаваемых сигналов 11, вторые - с выходомисточника программно-задаваемых сигналов 12. Выходные сигналы блоков моделирования програм-. мных движений 13 и 14 поступают соответственно на третьи входы блоков управления 15 и 16, выходные сигналы которых подаются на электродвигатели 2 и 5. Устройство работает следукядим образом. Сигналы UQ (t) и Uol(t) от источников программно-задаваемых сигналов управления 11 и 12 попарно поступают на .входы блоков 13 и 14, где происходит формирование аналогов программных движений основного и дополнительного приводов W к Чгпр по соотношениям .(Ч,„p.(i)Uo1(l)(P)Uol( i fanpH)--UшШФa1 {PHUoa(i)0a2()), где ф (р) - передаточная функция основного привода по управляющему воздействию DO (t)i ф. р) - передаточная функция основного привода по управляющему воздействию UoaCt)/ ф,(р) - передаточная функция дополнительного приво-да по управляющему воздействию Uoi Wi (})2(р) - передаточная функция дополнительного привода по управляющему воздействию Uoi(t) Таким образом, уже на стадии формирования программного движения каждого из приводов производится автоматический учет их взаимного влияния друг на друга путем введения элементов, моделирующих реакцию одного привода на отработку сигнала управления другим приводом. В составе блоков 13 и 14 таковыми являются элементы, соответствующие передаточным функциям ФцСР) и %-tfP Сформированные аналоги программных движений приводов ) Htf,pp(t) подаются на третьи входы соответствующих блоков управления 15 и 16, в которых на пер вые входы поступают сигналы с выходов 17 и 18, характеризукицие реальные законы движения приводов (1:) и %(t) с сигналами PUt/ и %(tj , в блоках управления 15 и 16 формируются дополнительные упр влякицие сигналы Uftt) и UatW по соотношениям j 0,1и--иИ&..вр(1ЬР1ШГ , ОаН) --(d )t4 4npW-«f2W 3, где i , ,P , Pa., - коэффициенты усиления, pdfe-t В тех же блоках щзоисходйт сложе ние полученных дополнительных управ яюсцих сигналов U-i От) и с основ ными управляющими сигналами UQI W и Ooi(t) , поступающими с выходов 11 и 12 на вторые входа блоков управления 15 и 16. Результирующие управления 0 (t) и Ua(i) с выходов блоков управления 15 и 1§ поступают на элек тродвигатели приводов 2 и 5. При отсутствий на приводах возмущающих моментов каждый привод движется в соот ветствии с програил ой и сигналы о . реальных движениях приводов (i) и (f (t) совпадают с сигналамй1,„(). и ft Тогда в соответствии с (2) дополнительные управляющие сигналы отсутствуют и на электродвигатели 2 и 5 подаются основные управляющие сигналы UQ (-t) и Uoa W , поступающие от источников программно-задаваемых напряжений 11 и 12, что обеспечивает движение приводов в соответствии с програ «4ой. При появлении возмущающего момента на одном из приводов и вызывающего отклонения закона движения, например, основного привода 2 от программного закона, в блоке управления 15 возникает разность между сигналом о реальном движении Cf;j(t) и аналогом ) t в результате чего образуется дополнительный , управляющий сигнал ) , который накладываясь на основной программный сигнал Ofl (.t) , компенсирует возникающее рассогласование движения основного привода с заданным по программе . Таким образом, использование в стенде блоков моделирования программных движений приводов стенда, соединенных с источниками программно-задаваемых сигналов управления, выходы которых соединены с соответствующими блоками управления, позволяет повы-и сить точность воспроизведения испытательных воздействий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Центробежный испытательный стенд | 1982 |
|
SU1091078A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ ПЛАНШАЙБЫ РОТАЦИОННОЙ МАШИНЫ | 1991 |
|
RU2018898C1 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ИЗДЕЛИЙ НА ВОЗДЕЙСТВИЕ ЛИНЕЙНЫХ УСКОРЕНИЙ | 1989 |
|
SU1722142A1 |
| ДВУХСТЕПЕННОЙ ДИНАМИЧЕСКИЙ ИМИТАТОР ЦЕЛЕЙ | 2005 |
|
RU2273890C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ УЗЛОВ СТЕНДЕРА И СИСТЕМА УПРАВЛЕНИЯ ИСПЫТАНИЯМИ УЗЛОВ СТЕНДЕРА | 2021 |
|
RU2782171C1 |
| Устройство для статистическогоМОдЕлиРОВАНия пРОизВОдСТВЕННыХпРОцЕССОВ | 1977 |
|
SU796854A1 |
| СТЕНД ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2338992C1 |
| Стенд для испытания изделий на воздействие ускорений | 1990 |
|
SU1789937A1 |
ЦЕНТРОБЕЖНЫЙ СТЕНД,- содер- . ;.жащИй , платформу с приводом, направляющие и противовесы, связанные друг, с другом шарнирным рычажным механизмом, дополнительный привод радиального перемещения кареток и противовесов , систему регулирования движения приводов, блоки управления, отличающийся тем, что, с целью повышения точности воспроизведения испытательного воздействия, в . систему регулирования дополнительно введены два блока моделирования программных движений приводов, входа каждого из которых соединены с источ никами программно-задаваемых сигналов управления, а выходы - с соответствующими блоками управления..Щ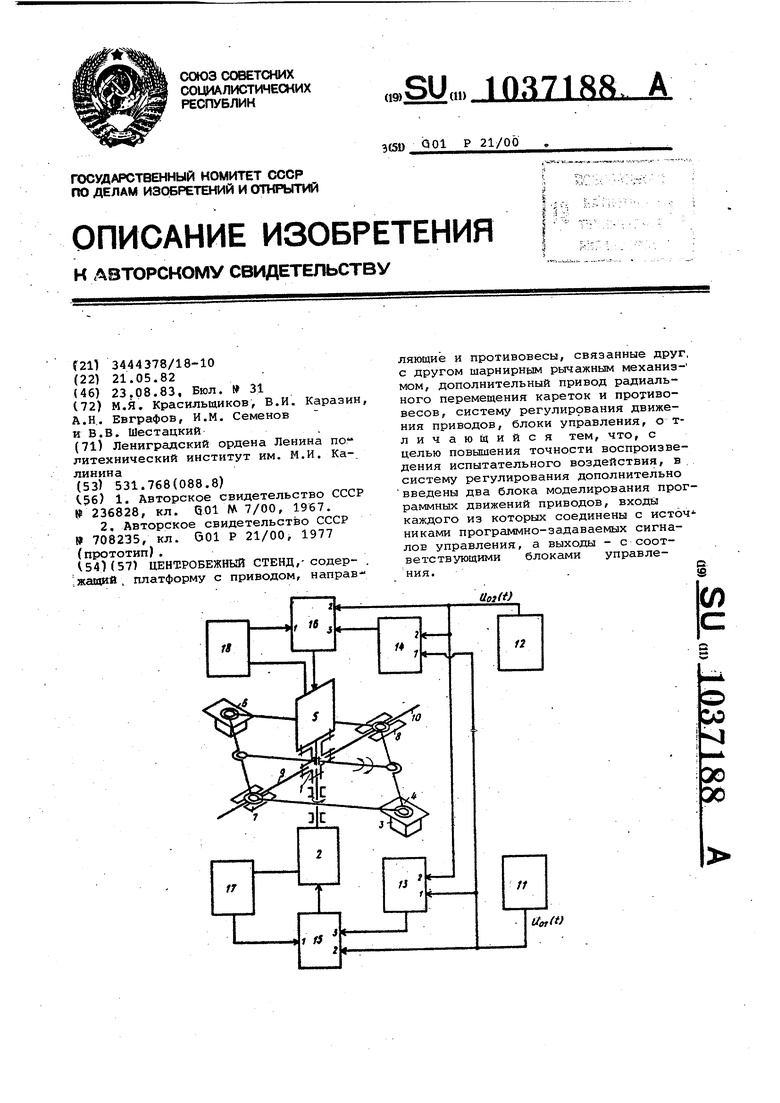
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU236828A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Центробежный стенд | 1977 |
|
SU708235A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
