11 Изобретение относится к подъемнотранспортному машиностроению, касается средств автоматизации механизмо и, в частности, может быть применено для контроля напуска каната на рудничных подъемных установках. Известно устройство для контроля натяжения гибкого органа подъемника, содержащее распорку с двумя опорами, связанными с гибким тяговьм органом, и магнит, жестко соединенный с фигурной скобой, охватывающей тяговый орган, пружину, кинематически связанную с распоркой, геркон, вьтолнен ньй с возможностью взаимодействия с магнитом, и сигнализатор Г 1 J. Недостатком указанного устройства является сравнительно низкая его надежность в работе, вызванная наличием подвижных деталей, т.е. корпуса и толкателя, имекшщх сопряжение по размерам, которые в условиях повьшенной влажности и агрессивной среды ствола шахты могут заклиниться, следовательно, приводят к отказу в работе устройства в целом. Применение скобы, жестко связанной с гибким тяговым органом, толкателя, жестко связанного через шток со скобой, пружины с центральным расположением по отношению к оси корпуса приводят к конструированию устройства с боковым односторонним расположением основных его элементов. Это приводит к образованию значительного изгибающего момента, в результате чего тяговый орган подвергается дополнительному изгибу периодического действия и теряет первоначальный срок службы. Применение такого устройства для контроля нат.яжения гибкого тягового органа противойёса может стать причиной зависания или заклинивания противовеса из-за соприкосновения корпуса устройства об элементы крепления ствола шахты, так как размеры сечения отделения ствола для противовеса соизмеримы с поперечными размерами устройства. Целью изобретения является повышение надежности работы устройства. Поставленная цель достигается тем, что устройство для контроля натяжения гибкого тягового органа подъемника, содержащее распорку с двумя опорами, связанными с гибким тяговым органом, и магнит, жестко соединенный с фигурной скобой, обхватывающей тяговый орган, пружину, кинематически связан74ную с распоркой, геркон, выполненный с возможностью взаимодействия с магнитом, и сигнализатор, снабжено дополнительной пружиной и ограничителями хода обеих пружин, при этом одни концы этих пружин выполнены взаимодействующими с распоркой и расположены перпендикулярно продельной оси гибкого тягового органа, а другие концы пружин опираются на основание фигурдюй скобы, на которой установлены ограничители хода пружин, причем фигурная скоба обращена выпуклой стороной к распорке. Кроме того, один конец распорки может быть жестко прикреплен к гибкому тяговому органу. На фиг. 1 показано устройство, общий вид; на фиг, 2 - сечение А-А на фиг. 1; на фиг, .3 - сечение Б-Б на фиг. 1. Устройство состоит из распорки 1, которая посредством опор 2 и 3, рас- положенных на противоположных концах распорки 1, связана с гибким тяговым органом 4, причем опора 2 является зажимной, а опора 3 - скользящей. В средней части распорки 1 симметрично относительно осевой линии натянутого гибкого тягового органа 4 жестко закреплены ограничители хода 5, на которые опираются обе пружины 6, закрытые фигурной скобой 7,у которой выпуклая сторона обращена к распорке 1 и направлена вдоль оси гибкого тягового органа 4. Вогнутая сторона , фигурной скобы 7 является направляющей гибкого тягового органа 4. К фигурной скобе 7 жестко прикреплен магнит 8 с возможностью взаимодействия с герконом 9, закрепленным на распорке 1 . Пара магнит 8 - геркон 9 выполнена с возможностью изменения расстояния между ними с помощью настроечного элемента (не показан) В нерабочем положении пружины 6 находятся в сжатом положении, при котором геркон 9 взаимодействует с полем постоянного магнита 8 и свои контакты (не показаны) держит в замкнутом состоянии. Устройство работает /следующим образом. Подъемник при движении в стволе шахты под действием своего веса поддерживает гибкий тяговый орган 4 в натянутом состоянии. Фигурная скоба 7 под действием силы натяжения кана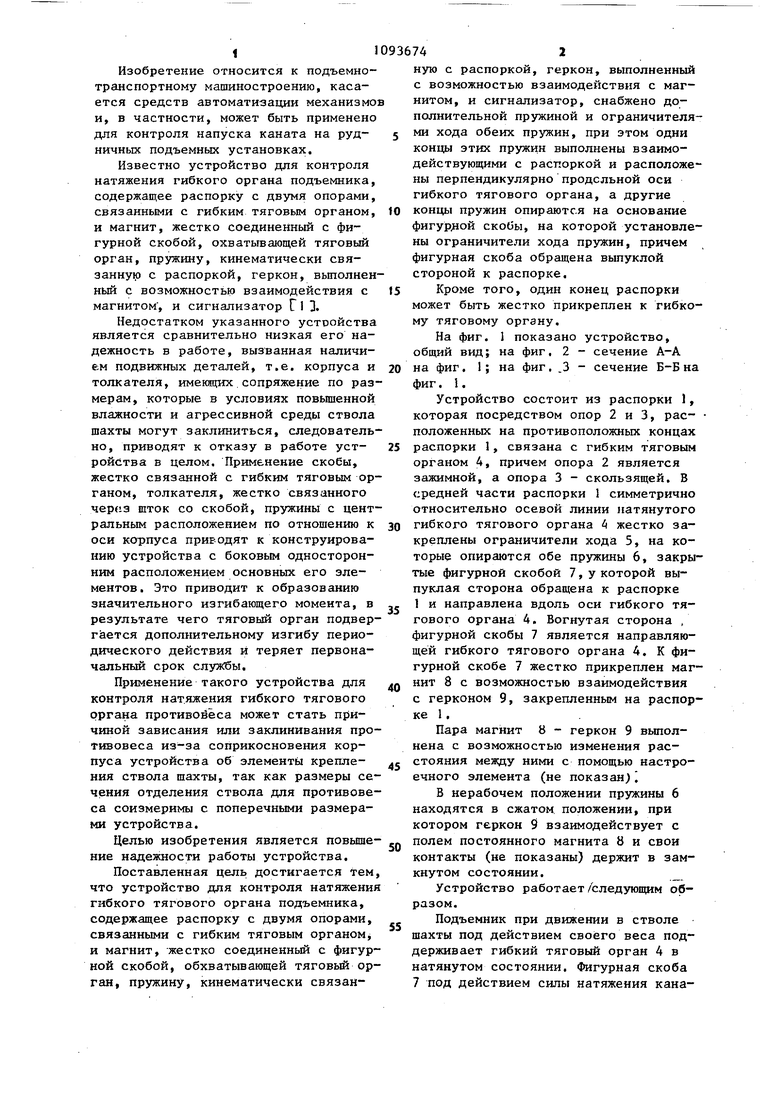
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля напуска гибкого тягового органа подъемника | 1986 |
|
SU1381051A1 |
| Устройство для контроля натяжения гибкого тягового органа подъемника (его варианты) | 1983 |
|
SU1164185A1 |
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1983 |
|
SU1146271A1 |
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1978 |
|
SU861265A1 |
| Устройство для контроля натяжения каната шахтной подъемной установки | 1987 |
|
SU1426918A1 |
| Устройство для контроля напуска каната подъемника | 1985 |
|
SU1331786A1 |
| Устройство для контроля натяжения каната подъемного сосуда | 1980 |
|
SU958288A1 |
| Универсальная роторная пропашная широкозахватная сеялка | 1987 |
|
SU1563612A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ КОЛОННЫ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ НЕФТЯНЫХ СКВАЖИН ОТ ПАРАФИНА | 2012 |
|
RU2495995C1 |
| Устройство для контроля натяжения каната | 1984 |
|
SU1230957A1 |
1. УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НАТЯЖЕНИЯ гаВКОГО ТЯГОВОГО ОРГАНА ПОДЪЕМНИКА, содержащее распорку с двумя опорами, связанными с гибким тяговым органом, и магнит, жестко соединенный с фигурной скобой, обхватывающей тяговый орган, пружину, ки нематически связанную с распоркой, геркон, выполненный с возможностью взаимодействия с магнитом, и сигнализатор, отличающееся тем, что, с целью повышения его надежности, оно снабжено дополнительной, пружиной и ограничителями хода обеих пружин, при этом одни концы этих пружин выполнены взаимодействуЮ11да:ми с распоркой и расположены перпендикулярно продольной оси гибкого тягового органа, а другие концы пружин опираются на основание фигурной скобы, на которой установлены ограничители хода пружин, причем фигур§ ная скоба обращена вьтуклой стороной к распорке. (Л 2. Устройство по п. 1, отличающееся тем, что один конец распорки жестко прикреплен к гибкому тяговому органу. X) 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1978 |
|
SU861265A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
