1
Изобретение касается средств автоматизации подъемно-транспортных механизмов.
Известно устройство для контроля натяжения гибкого тягового органа подъемника, содержащее магнит, связанный с гибким тяговым органом, геркон, закрепленный на корпусе, жестко соединенном с контролируемым гибким тяговым органом, и взаимодействующий с магнитом, сигнализатор, в цепь питания которого включены контакты геркона 1.
Недостатками такого устройства являются сравнительно низкие его надежность в работе и чувствительность.
Цель изобретения - повыщение надежности устройства в работе и его чувствительности.
Это достигается тем, что устройство снабжено толкателем, один конец которого соединен с гибким тяговым органом, причем магнит имеет кольцевую форму и закреплен на другом конце толкателя, а геркон размещен в полости кольцевого магнита параллельно его осевой линии.
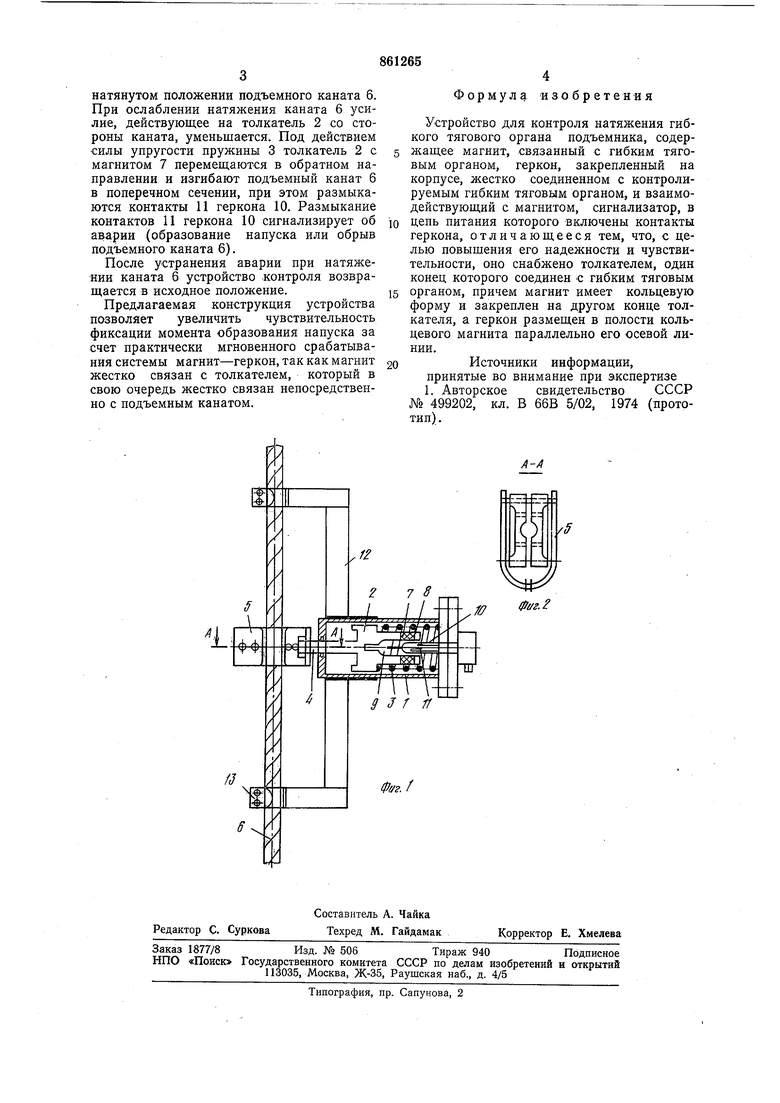
На фиг. 1 схематически изображено предлагаемое устройство, разрез; на фиг. 2 - сечение А-А на фиг. 1.
Устройство содержит корпус 1, в котором расположён толкатель 2 с пружиной 3.
Один конец толкателя 2 посредством штока 4 и скобы 5 жестко связан с подъемным канатом 6, а на другом конце толкателя 2 впрессован постоянный магнит 7, установленный в латунной втулке 8.
На конце толкателя 2 с магнитом 7 выполнена полость 9, куда вставлен геркон 10 с контактами 11. К корпусу 1 жестко-прикреплены распорки 12 с опорами 13, являющиеся направляющими подъемного каната 6.
В нерабочем положении пружина 3 толкателя 2 находится в сжатом положении, при котором геркон10 находится в замкнутом положении, взаимодействуя с полем постоянного магнита 7.
Устройство работает следующим образом. Подъемник при движении в стволе щах20 ты под действием своего веса, поддерживает канат 6 в натянутом состоянии. Скоба. 5, жестко связанная посредством Штока 4 с толкателем 2, под действием силы натяжения каната 6, преодолевая упругое усилие пружины 3, перемещается в крайнее положение. Постоянный магнит 7 движется вместе с толкателем 2. Геркон 10 настроен так, что при движении толкателя 2 с магнитом 7 в крайнее положение он за30 мыкает свои контакты 11, сигнализируя о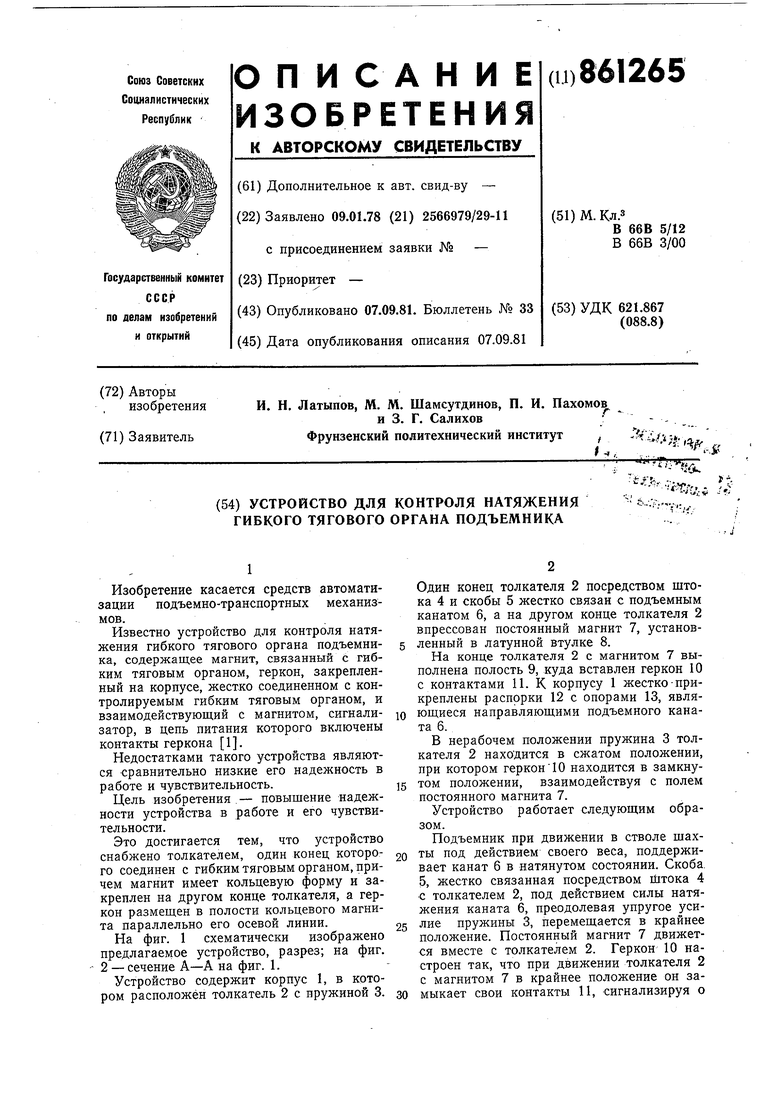
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1983 |
|
SU1093674A1 |
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1983 |
|
SU1146271A1 |
| Устройство для контроля напуска гибкого тягового органа подъемника | 1986 |
|
SU1381051A1 |
| Устройство для контроля натяжения гибкого тягового органа подъемника (его варианты) | 1983 |
|
SU1164185A1 |
| Устройство для контроля натяжения каната подъемного сосуда | 1980 |
|
SU958288A1 |
| Устройство для контроля натяжения каната | 1984 |
|
SU1230957A1 |
| Устройство для контроля натяжения каната шахтной подъемной установки | 1987 |
|
SU1426918A1 |
| Устройство для контроля напуска каната подъемника | 1985 |
|
SU1331786A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ КАНАТОВ КАРЬЕРНОГО ЭКСКАВАТОРА | 2008 |
|
RU2425194C2 |
| ДИРИЖАБЛЬ И ЯКОРЬ ДИРИЖАБЛЯ (ВАРИАНТЫ) | 2000 |
|
RU2174481C1 |
