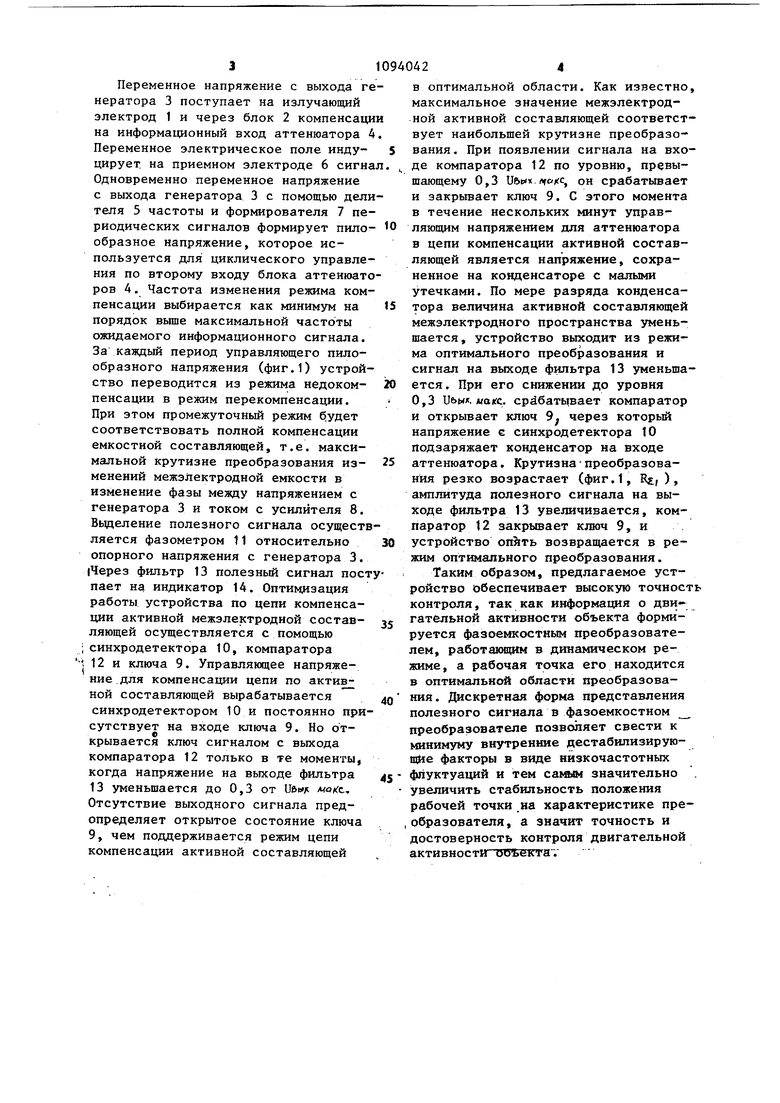
Изобретение относится к средствам контроля и управления, а именно к контролю биологических объектов, и может быть использовано в медицине, в физике научного эксперимента, в качестве устройств охранной сигнализации и т.д. Известно устройство содержащее генератор, излучакщий и приемный электроды, фазометр, фильтр и индика тор ij. Недостатком устройства является зависимость его чувствительности от условий окружающей среды, что снижает ста.бильность работы и точность контроля. Наиболее близким к изобретению по технической сущности является устройство для контроля изменения положения объекта, содержащее генератор, выход которого соединен с входом фазовращателя и первым входом управляемого фазовращателя, выходом соединенного с входами излучающего электрода и блока компенсации, вьпсод которого соединен с первым входом блока аттенюаторов, выхот дом соединенного с первым входом усилителя, вьпсод которого соединен С первым входом фазометра, выходом соединенного с входами фильтров, первого и второго, .выход которого соединен с вторым входом блока аттенюаторов, выход первого фильтра соединен с входом индикатора и вторьв4 входом управляемого фазовращателя, выход приемного электрода - с вторь входом усилителя, выход фазовращателя - с вторым входом фазометра. Устройство обеспечивает возможность контроля двигательной активнос ти объекта путем регистрации изменения межэлектродной емкости при перемещении объекта или изменении его объема между излучающим и приемными электродами Ц2. Однако в известном устройстве компенсация емкости между электродами, обусловленной электрофизическими характеристиками пространства, в котором находится объект, производится с помощью электрически управляемого аттенюатора, управление которым осуществляется сигналом, поступающим на его вход с приемного электрода через усилитель, фазометр и фильтр. Причем система компенсации емкости между электродами построена по принципу статического автоматического регулирования. Такие системы обладают гистерезисом, который приводит к увеличению погрешности конт- роля . Дополнительная погрещность контроля двигательной активности объекта образуется за счет внешних дестабилизирующих факторов. Целью изобретения является повышение точности контроля положения объекта. Поставленная.цель достигается тем, что устройство для контроля изменения положения объекта, содержащее блок компенсации, выход которого соединен с первым входом блока аттенюаторов , выход которого и выход приемного электрода соединены с входом усилителя, выход которого соединен с первым входом фазометра, выход которого соединен с входом фильтра, выход которого соединен с входом индикатора, излучающй электрод и генератор, введены делитель частоты, формирователь периодических сигналов, синхродетектор, компаратор и ключ, выход генератора соединен с входом излучающего электрода, вторым входом фазометра, входами блока компенсации и делителя частоты, выход которого соединен с входом формирователя периодических сигналов и с первым входом синхродетектора, второй вход которого соединен с выходом усилителя, а выход - с первым входом ключа, выход которого соединен с вторым входом блока аттенюаторов, выход формирователя периодических сигналов соединен с третьим входом блока аттенюаторов, выход фильтра подключен .к входу компаратора, выход которого подключен к второму входу ключа. На фиг. 1 приведена характеристика фазоемкостного преобразователя устройства; на фиг. 2 - блок-схема устройства. Устройство (фиг.2) состоит из излучающего электрода 1, блока 2 компенсацкКу генератора 3. блока аттенюаторов 4 делителя 5 частоты, приемного электрода 6, формирователя 7 периодических сигналов, усилителя 8, ключа 9, синхродетектора 10, фазометра 11, компаратора 12, фильтра 13 и индикатора 14. Устройство работает следующим образом. Переменное напряжение с выхода г нератора 3 поступает на излучающий электрод 1 и через блок 2 компенсац на информационный вход аттенюатора Переменное электрическое поле индуцирует. на приемном электроде 6 сигн Одновременно переменное напряжение с выхода генератора 3 с помощью дел теля 5 частоты и формирователя 7 пе риодических сигналов формирует пило образное напряжение, которое используется для циклического управле ния по второму входу блока аттенюат ров А. Частота изменения режима ком пенсации выбирается как минимум на порядок выше максимальной частоты ожидаемого информационного сигнала. За каждый период управляющего пилообразного напряжения (фиг.1) устрой ство переводится из режима недокомпенсации в режим перекомпенсации. При этом промежуточный режим б.удет соответствовать полной компенсации емкостной составляющей, т.е. максимальной крутизне преобразования изменений межэлектродной емкости в изменение фазы между напряжением с генератора 3 и током с усилителя 8. Вьщеление полезного сигнала осущест ляется фазометром 11 относительно опорного напряжения с генератора 3. |Через фильтр 13 полезный сигнал пос пает на индикатор 14. Оптимизация работы устройства по цепи компенсации активной межэлектродной составляющей осуществляется с помощью синхродетектора 10, компаратора 12 и ключа 9. Управляющее напряжение для компенсации цепи по активу ной составляющей вырабатывается синхродетектором 10 и постоянно при сутствует на входе ключа 9. Но открывается ключ сигналом с выхода 12 компаратора iz только в те моменты, когда напряжение на выходе фильтра 13 уменьшается до 0,3 от USBIA , Отсутствие выходного сигнала предопределяет открытое состояние ключа 9, чем поддерживается режим цепи компенсации активной составляющей 424 в оптимальной области. Как известно, максимальное значение межэлектродной активной составляющей соответствует наибольшей крутизне преобразования . При появлении сигнала на входе компаратора 12 по уровню, превышающему 0,3 UbB rtfc-KC, он срабатывает и закрьгеает ключ 9. С этого момента в течение нескольких минут управляющим напряжением для аттенюатора в цепи компенсации активной составляющей является напряжение, сохраненное на конденсаторе с малыми утечками. По мере разряда конденсатора величина активной составляющей межэлектродного пространства уменьшается , устройство выходит из режима оптимального преобразования и сигнал на выходе фильтра 13 уменьшается. При его снижении до уровня 0,3 Ubw. , срабатывает компаратор и открывает ключ 9 через которьй напряжение е синхродетектора 10 подзаряжает конденсатор на входе аттенюатора. Крутизна - преобразования резко возрастает (фиг.1, R, ), амплитуда полезного сигнала на выходе фильтра 13 увеличивается, компаратор 12 закрывает ключ 9, и устройство опить возвращается в режим оптимального преобразования. Таким образом, предлагаемое устройство обеспечивает высокую точностьконтроля , так как информация о двигательной активности объекта формируется фазоемкостным преобразователем, работающим в динамическом режиме , а рабочая точка его находится в оптимальной области преобразования. Дискретная форма представления полезного сигнала в фазоемкостном преобразователе позволяет свести к минимуму внутренние дестабилизирующие факторы в виде низкочастотных флуктуации и тем значительно увеличить стабильность положения рабочей точки .на характеристике преобразователя, а значит точность и достоверность контроля двигательной активности оЬЪектН.
0
i
/г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля двигательной активности объекта | 1979 |
|
SU868806A1 |
| Устройство для контроля двигательной активности объекта | 1980 |
|
SU943789A1 |
| Устройство для контроля двигательнойАКТиВНОСТи Об'ЕКТА | 1979 |
|
SU853640A1 |
| Устройство для счета движущихся объектов | 1986 |
|
SU1330647A1 |
| Устройство для контроля и сигнализациипЕРЕМЕщЕНий Об'ЕКТА | 1979 |
|
SU842889A1 |
| РАДИОЛУЧЕВОЙ ДАТЧИК ОХРАНЫ | 1992 |
|
RU2079889C1 |
| Устройство контроля скорости | 1983 |
|
SU1111190A1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ | 2001 |
|
RU2190238C1 |
| Устройство опознавания подвижных объектов | 1984 |
|
SU1191345A1 |
| РАДИОДАЛЬНОМЕР | 2000 |
|
RU2197000C2 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА, содержащее блок компенсации, выход которого соединен с первым входом блока аттенюаторов, выход которого и выход приемного электрода doeдинeны с входом усилителя, выход которого соеданен с первым входом фазометра, выход которого соединен с входом фильтра, выход которого соединен с входом индикатора, излучающий электрод и генератор, о т л и ч а ю щ е е с я тем, что, с целью повышения точности устройства, в него введены делитель частоты, формирователь периодических сигналов, синхродетектор, компаратор и ключ, выход генератора соединен с входом излучающего электрода, вторым входом фазометра, входами блока компенсации и делителя частоты, выход которого соединен с входом формирователя периодических сигналов и с первым BxcMitOM синхродетектора, второй вход которого соединен с выходом усилителя, а выход - с первым входом § ключа, выход которого соединен с вторым входом блока аттенюаторов, вы(/} ход формирователя периодических сигналов соединен с третьим входом бло- : с: ка аттенюаторов, выход фильтра под§ ключен к входу компаратора, выход коI торого подключен к второму входу I 1 ключа.
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля двигательной активности объекта | 1977 |
|
SU625224A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР | |||
| Устройство для управления пропорциональными исполнительными механизмами | 1980 |
|
SU868706A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
