Изобретение относится к средствам контроля и управления, точнее к средствам контроля биологических объек- тов, и может быть использовано для охранной сигнализации в биологии, медицине и т.д. Известно устройство для контроля двигательной активности объектов, содержащее усилитель, настроенный на ультразвуковую ;частоту, электроакустические преобразователи, присоединенные к его входу и выходу так, чтобы образовалась положительная обратная связь, вызывающая генерацию в усилителе. Движение объекта в зоне контроля, образованной выходными и входными преобразователями, вызывает H3MeHei6ieпар метров генерируемого сигнала С l.lv Указанное устройство имеет стабиль ность параметров генерируемого сигнала. Наиболее близким к предлагаемому является устройство для контроля и си нализации перемещений объекта,, содерж щее генератор, выход которого соединен с первыми входами управляемого фазо-. вращателя и фазометра, выход которого через.фильтр соединен с индикатором и вторым входом управляемого фозовращателя, выход Которого соединен с излучающим электродом, выход приемного электрода соединен со вторым входом фазометра 12. Недостаток этого устройства - ограничение чувствительности за счет флуктуации фазы сигнала обусловленных воздействий дестабилизирующих факторов (нестабильности питания, температурные уходы и т. п.) на согласующие и формирующие устройства измерительного канала, а также инструментальной погре- шности фазометра. Кроме того, введение положительной обратной связи по фазе может привести к самовозбуждению , всего устройства, Указанные явления приводят к увеличению количества ложных срабатываний устройства.
Цель изобретения - повьшё-ние чувствительности и уменьшение вероятности ложных срабатываний устройства.
Поставленная цель достигается тем, что в устройство, содержащее последовательно соединенные генератор, управляемый фазовращатель и излучающий электрод, приемный электрод, фазометр, опорный вход которого соединен с выходом генератора, первый фильтр, выход которого соединен со входом индикатора, введены юстировочный фазовращатель, два коммутатора, дв.а пиковых детектора, второй фильтр, арифметический блок, делитель частоты и формирователь импульсов, первый вход первого коммутатора соединен с приемным электродом, выход управляемого фазоврагчателя через юстировочный фазовращатель соединен со вторым входрм пер вого коммутатора выход которого соединен со входом фазометра, выход фа1
1вометра соединен со входом второго коммутатора, первый и второй выходы кото.рого через первый и второй соответс твенно пиковые детекторы подключены к первому и второму входам арифметич ского блока, выход которого соединен со входом первого фильтра-, выход первого пикового детектора через второй фильтр соединен с управляющим входом управляемого фазовращателя, выход генератора через делитель частоты соединен со входом формирователя импульсов, первый и второй выходы которого соединены с управляющими входами соответственно первого и второго коммута- торов.
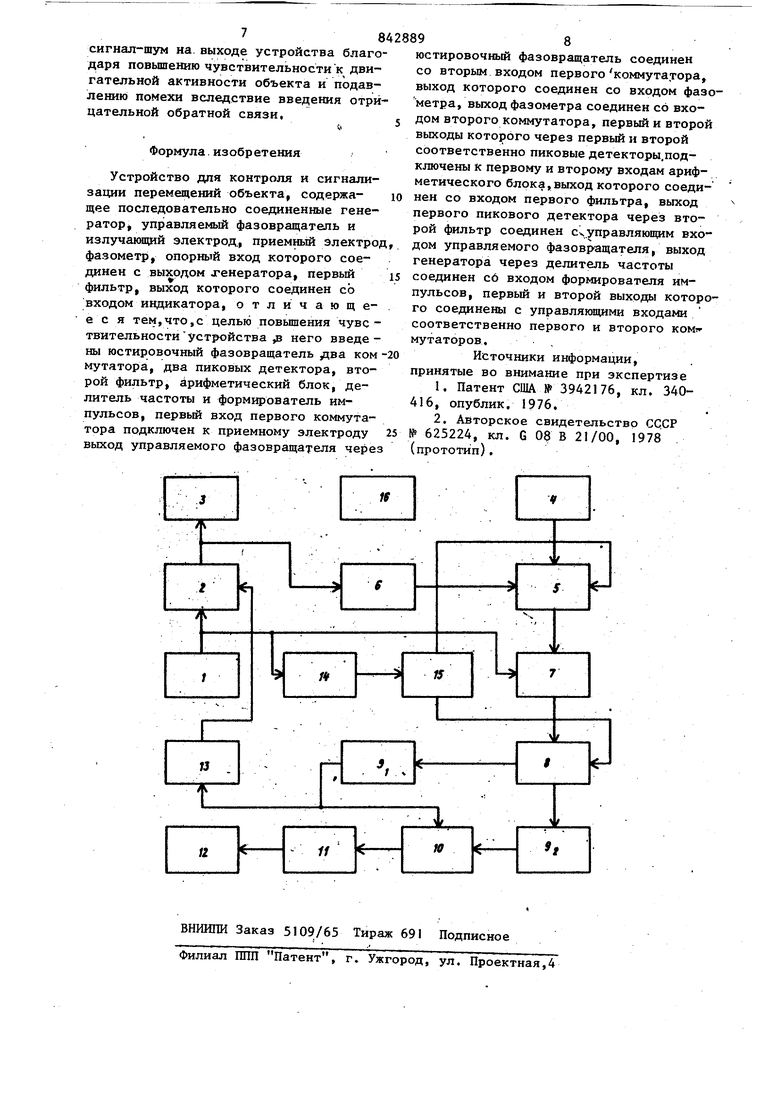
Структурная схема предлагаемого ycTpducTBia приведена на чертеже.
Устройство для контроля и сигнахшзации перемещений объекта содержит генератор 1, управляемый фазовращатель 2, излучающий 3 и приемный 4 электроды первый коммутатор 5, юстировочный фазовращатель 6, фазометр 7, второй коммутатор 8, два пиковых детектора 9, и 9, арифметический блок 10, фильтры 11 и 13, индикатор 12, делитель 14 частоты, формирователь 15 импульсов контролируемьй объект 16,
Генератор 1 подключен ко входу управляемого фазовращателя 2 и к опорному входу фазометра 7, Выход управпяемого фазовращателя 2 подключен к излучающему электроду 3 и ко входу юстировочного фазовращателя 6,Приемный электрод 4 и выход юстировочного фазовращателя 6 подключены ко входам коммутатора 5, выход которого соединен с измерительным входом фазометра 7. Выход фазометра 7 соединен со входом коммутатора 8, выходы которого подключены ко входам двух пиковых Детекторов 9, выходы которых подключены ко входам арифметического блока 10, причем выход одного из пиковых детекторов 9 через фильтр 13 соединен с управляющим входом фазовращателя 2. Выход арифметического 9 через фильтр 11 соединен совхЬдом индикатора 12. Управляющие входы коммутаторов 5 и 8 подключены к выходам формирова- . теля 15, вход которого через делитель 14 частоты с выходом генератора 1. Контролируемый объект-16 помещается в зоне между излучающим 3 и приемным 4 электродами.
Генератор 1 служит для формирования гармонического либо импульсного напряжения с высокой стабильностью частоты и амплитуды, достаточной для нормальной работы фазового детектора. В качестве генератора 1 может быть использован гармонический либо релаксационный генератор, стабилизированный кварцем,
Управляе:мый. фазовращатель 2 служит для обеспечения обратной связи по фазе, а также для начальной установки и калибровки устройства, В качес тве фазовращателя может быть применена, например, RC-цепь с варикапом либо полевым транзистором в качегстве управляющего элемента.
Измерительный 3 и приемный 4 электроды Ьлужат для создания в контролируемой зоне переменного электрического поля. В качестве электродов могут быть использованы металлические пластины, провода и т,п,
Юстировочный фазовращатель 6 служит для подачи на вход фазометра 7 напряжения такой же амплитуды и фазы, как и на приемный электрод 4, В качестве юстировочного фазовращателя 6 может быть использован конденсатор либо перестраиваемая- цепь.
Коммутаторы 5 и 8 служат для последовательного подключения приемного электрода 4 или выхода юстировочного фазовращателя 6 ко входу фазометра 7 и для переключения выхода фазометра
7между входами пиковых детекторов 9,
8качестве коммутаторов 5 и 8 могут быть использованы электромагнитные
5.842889
реле, герконы либо электронные ключи на биполярных или МОП-транзисторах. Фазометр 7 производит сравнение опорного,сигнала, вырабатываемого ге нератором 1, с промодулированным по фазе двигательной активности объекта напряжением, поступающим с приемного электрода 4, либо с сигналом, поступающим с выхода юстировочного фазовращателя 6, и вырабатывает напряжение, пропорциональное изменению фазы В качестве фазометра 7 может быть использован фазовый дискриминатор с соответствующими согласуювшми устройствами. Пиковые детекторы 9 служат для преобразования последовательностей амплитудно-модулированных импульсов, поступающих с.выхода второго коммутатора 8, в. непрерыв ый сигнал. Пиковые детекторы 9 служат для вьщелени огибающей амплитудно-модулированнь1х импульсов, поступающих с выходов коммутатора 5 и 8, и могут быть выполнены на полупроводниковых диодах по известным схемам. Арифметический блок 10 вырабатывает напряжение, пропорциональное разности сигналов, присутствующих на его входах. В качестве арифметического блока 10 может быть применен, например, дифференциальный усилитель. Фильтры 11 и 13 служат для частотиой селекции сигналов. Могут быть использованы пассивные и активные ФНЧ либо полосовые фильтры. , Индикатор 12 преобразует информацию о двигательной активности объекта 16 в удобную для восприятия операторо форму. В качестве индикатора 12 может быть применен осциллограф, самописец, .пороговое устройство подачи световых или звуковыэ сигнгшов и т.п. Формирователь 15 Импульсов вырабатывает импульсы для управления коммутаторами 5 и 8. В качестве формирователя 15 может быть использован, например, транзисторный ключ. Делитель 14 частоты служит для деле. ния частоты сигнала, вырабатываемо1;о генератором 1, в определенное количество раз с тем, чтобы обеспечить необходимую длительность коммутации и синхронизм коммутации. В качестве длителя 14 частоты может быть использован, например, цифровой счетчик. Устройство работает следующим образом.
Генератор I вырабатывает переменное напряжение с частотой fp. Излучающий электрод 3 создает в окружающем пространстве переменное электрическоь поле, которое индуцирует на приемном электроде 4 ЭДС, поступающую на один из входов коммутатора Si На второй вход коммутатора 5 поступает напряжение с выхода юстировочного фазовращателя 6, Эти напряжения попеременно поступают на вход измерительного канала фазометра 7 с частотой, намного меньшей частоты f , но большей, чем средняя частота сигнала двигательной активности юбъекта 16, где сравнивается с опорным напряжением, поступающим с генератора I. Фазометр 7 вырабатывает напряжение, пропорциональное разности фаз между сигналами в опорном и измерительном каналах. При этом, в то .время, когда вход фазометра 7 подключен к приемному электроду 4, на выходе его присутствует как полезный сигнал, обусловленный двигательной активностью объекта 16, так и помеха, обусловленная флуктуациями выходного напряжения фазометра 7, В те же интервалы времени, когда вход фазометра 7 подключён к выходу юстировочного фазовращателя 6, на его выходе присутствует только напряжение помехи. Коммутатор 8 -синхронно с коммутатором 5 подключает вы-, ход фазометра 7 ко входам двух пиковых детекторов 9j и 9г , которые преобразуют АИМ-сигнал, создаваемый коммутатором, в непрерывные напряжения, соответсвующие либо сумме полезного сигнала и помехи (первый пиковый детектор 9), либо только помехе (второй детектор 9). На выходе арифметическо го блока 10 образуется напряжение, содержащее только полезный сигнал. Это напряжение селектируется фильтром 11 и поступает на индикатор 12. Одновременно напряжение помехи с выхода пикового детектора 9 через полосоврй фильтр 13 поступает на управляющий вход управляемого фазовращателя 2 так. чтобы образовалась отрицательная обратная связь по фазе. Таким образом, происходит дополнительная компенсация/ помехи, Глубина обратной связи определяется коэффициентом передачи пикового детектора 9 и фильтра 13, Преимущество ;1предпагаемого устройства состоит в повышении соотношения
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля двигательнойАКТиВНОСТи Об'ЕКТА | 1979 |
|
SU853640A1 |
| Устройство для контроля двигательной активности объекта | 1980 |
|
SU943789A1 |
| Устройство для контроля двигательной активности объекта | 1977 |
|
SU625224A1 |
| Устройство для контроля двигательной активности объекта | 1979 |
|
SU868806A1 |
| Устройство для контроля изменения положения объекта | 1982 |
|
SU1094042A1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2002 |
|
RU2226479C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2276038C1 |
| Способ измерения направления большойпОлуОСи эллипСА пОляРизАции МАгНиТНОйНАпРяжЕННОСТи элЕКТРОМАгНиТНОгО пОляи уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU805231A1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2012 |
|
RU2521456C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АСТЕРОИДА | 2016 |
|
RU2637048C1 |
