со
4
00
Изобретение относится к машиностроению и может быть использовано в различных отраслях народного.хозяйства для автоматизации производственных процессов.
Известны манипуляторы, содержащие гидравлический или электромеханический приводы исполнительных органовГ1 и 2J.-
Манипуляторы с гидравлическим приводом имеют ограниченную возможность транспортирования грузов на расстояние, а манипуляторы с механическим приводом обладают сравнительно низкой грузоподъемностью по отношению к собственному весу.
Наиболее близким к изобретению является манипулятор, содержащий схват механизм перемещения, включающий блок регулирования скорости и две механические ветви - транспортную и подъемную, и привод. Каждая ветвь представляет собой ведомый вал, на котором размещены шестерни, связанные через блок промежуточных шестерен с валом электродвигателя. Передача крутящего момента на ведомые валы и изменение скорости их вращения осуществляется посредством электромагнитных муфт. Управление механическими ветвями независимо друг от друга СЗ.
Однако наличие большого количества общего числа элементов управления, в частности шести электромагнитных муфт, снижает надежность работы известного устройства и усложняет систему управления им. Использование только наружных зубчатых зацеплений приводит к низкой грузоподъемности в связи с большими радиальными нагрузками на подшипники, к возникновению больших боковых зазоров в зацеплениях, которые способствуют росту динамических нагрузок на звенья, что отрицательно влияет на точность позиционирования транспортируемого объекта. Подъемная ветвь содержит стопор, выполненный в виде храпового механизма, который срабатывает только в аварийном режиме. Наличие специального тормозного устройства, расклинивающего опорные ролики в направляющих желобах, значительно усложняет конструкцию.
Целью изобретения является повышение надежности в работе и точности позиционирования манипулятора.
Цель достигается тем, что в манипуляторе, содержащем схват, механизм перемещения, включающий блок регулирования скорости и механические ветви - транспортную и подъемную, и привод, блок.регулирования скорости и механические ветви выполнены каждые в виде дифференциально-планетарных рядов, причем водило дифференциальнопланетарного ряда блока регулирования
скорости жестко связано с солнечной шестерней дифференциешьно-планетарного ряда механических ветвей, при этом подъемная ветвь снабжена самотормозящей парой, ведущий элемент которой кинематически связан с эпициклическим колесом дифференциальнопланетарного ряда механических ветвей посредством дополнительных шестерни и тормозной муфты, а транспортная ветвь снабжена зубчато-реечной передачей, шестерня которой жестко связана с водилом дифференциальнопланетарного ряда механических ветвей.
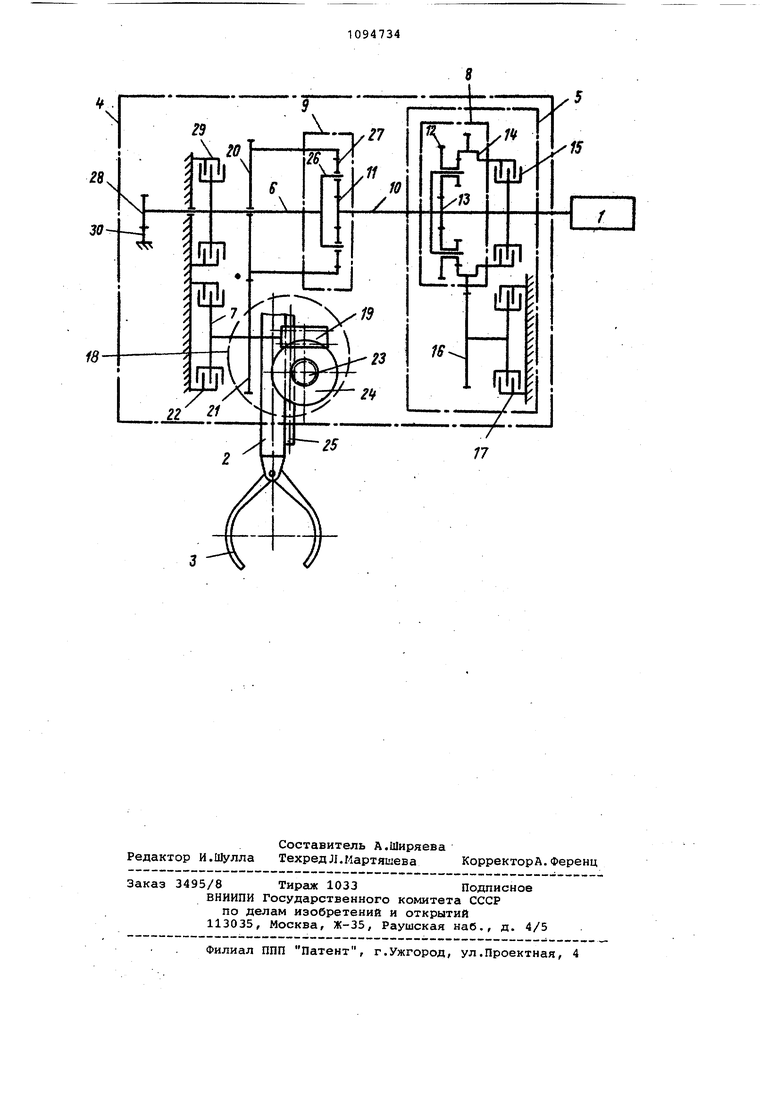
На чертеже изображена схема манипулятора .
Манипулятор содержит электродвигатель 1, шток 2 с закрепленным на нем захватом 3. Шток 2 связан с механизмом 4 перемещения, включающим блок 5 регулирования скорости и две механические ветви - транспортную 6 и подъ;емную 7. I
Механизм 4 перемещения выполнен в виде двух дифференциальных планетарных рядов 8 и 9. Водило 10 планетарного ряда 8 блока 5 регулирования скорости жестко связано с солнечной шестерней 11 планетарного ряда 9 механических ветвей 6 и 7.
Сателлиты 12 размещены на водиле 10 и входят в зацепление с ведущей солнечной шестерней 13 и с внутренним зубчатым венцом эпициклического колеса 14, кинематически связанного с валом электродвигателя 1 через муфту 15. Наружный венец эпициклического колеса 14 посредством шестерни 16 связан с тормозной муфтой 17.
Солнечная шестерня 11 является приводным звеном механических ветвей 6 и 7. Подъемная ветвь 7 снабжена самотормозящей парой 18, например червячной, ведущий элемент (червяк ) 19 которой кинематически связан с эпициклическим колесом 20 дифференциально-планетарного ряда 9 посредством шестерни 21 и тормозной муфты 22
Зубчатое колесо 23, жестко связан-ное с червячным колесом 24, входит в зацепление с зубчатой рейкой 25, закрепленной на штоке 2.
Транспортная ветвь б состоит из водила 26, на котором размещены сателлиты 27, входящие в зацепление с солнечной шестерней 11 и внутренним зубчатым венцом эпициклического колеса 20,
Транспортная ветвь 6 снабжена шестерней 28, которая жестко связана с водилом 26 и тормозной муфтой 29 и находится в зацеплении с зубчатой рейкой 30, закрепленной вдоль транспортного пути манипулятора.
Устройство работает следующим образом.
Электродвигатель 1 приводит во вращение солнечную шестерню 13 планетарного ряда 8 блока 5 регулирования скорости.
Для обеспечения перемещения штока2 с малой скоростью, необходимой в начале и конце транспортирования объекта, срабатывает тормозная муфта 17, которая через шестерню 16 останавливает эпициклическое колесо 14.
При этом сателлиты 12, приводимые во вращение солнечной шестерней 13, обкатываются по внутреннему зубчатому венцу эпициклического колеса 14 и увлекают за собой водило 10.
Водило 10 вращается со скоростью, меньшей скорости вала электродвигателя 1, в соответствии с передаточным отношением, выбранным для этого планетарного ряда.
Для увеличения скорости перемещения штока 2 тормозную муфту 17 отключают. При этом срабатывает муфта 15, соединяя вал электродвигателя 1 с эпициклическим колесом 14. В этом случае солнечная шестерня 13, эпициклическое колесо 14 и водило 10 вращаются с валом электродвигателя 1 как . одно целое.
Солнечная шестерня 11 планетарного ряда 9 механических ветвей б и 7, жестко связанная с водилом 10, приводит в движение сателлиты 27.
Для перемещения штока 2 с корпусом манипулятора вдоль транспортного пути устройства срабатывает тормозная муфта 22, которая через шестерню 21 останавливает эпициклическое колесо 20. Подъемная ветвь 7 при этом не работает.
Сателлиты 27, обкатываясь по внутреннему зубчатому венцу эпициклического колеса 20, увлекают за собой водило 26. Шестерня 28, жестко связанная с водилом 26, находится в зацеплении с зубчатой рейкой 30 и осуществляет перемещение.
При перемещении штока 2 в корпус манипулятора тормозная муфта 22 отключается, срабатывает тормозная муфта 29 и водило 26 останавливается.
Солнечная шестерня 11 через сателлиты 27 приводит во вращение эпициклическое колесо 20, наружный зубчатый венец которого входит в зацепление с шестерней 21, жестко связанной с червяком 19 червячной ,пары 18.
o Зубчатое колесо 23, жестко связанная с червяком 24, находится в зацеплении с зубчатой рейкой 25, неподвижно закрепленной на штоке 2, поэтому ее вращение вызывает перемещение што5ка 2 в корпусе манипулятора.
Применение предлагаемого манипулятора в условиях автоматизации производственных процессов позволит повысить надежность функционирования ма0нипулятора за счет исключения самопроизвольного опускания груза, сокращения общего числа элементов управления, значительно увеличить срок службы благодаря использованию в предла5гаемой конструкции зубчатых передач с большим коэффициентом перекрытия (планетарных, реечных, червячных, снижающих удельные давления в зубчатых зацеплениях, подверженных боль0шим нагрузкам, сократить время на дополнительные установочные операции, связанные с размещением объекта, а в ряде случаев исключить их ввиду более высокой точности размещения
5 последнего, рационально использовать благодаря малым габаритам производственную площадь в сравнении с занимаемой манипулятором аналогичной грузоподъемности, что играет немаловаж0ную роль при модернизации уже существующих предприятий.
Металлоемкость предлагаемого манипулятора в десять раз ниже металлоемкости известного манипулятора той же грузоподъемности.
5
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| Планетарная коробка передач | 2017 |
|
RU2646982C1 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| ДИФФЕРЕНЦИАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2266448C2 |
| КОЛЕСНЫЙ РЕДУКТОР | 1998 |
|
RU2143350C1 |
| ВЕДУЩИЙ УПРАВЛЯЕМЫЙ МОСТ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2468936C2 |
| БЕССТУПЕНЧАТЫЙ ЗАМКНУТЫЙ ПЛАНЕТАРНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 1996 |
|
RU2110720C1 |
| ПЛАНЕТАРНАЯ СОСТАВНАЯ КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2382916C1 |
| ГИДРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ ТЯГОВО-ТРАНСПОРТНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2294849C2 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДИНАМИЧЕСКИМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА КОЛЕСНО-ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2003 |
|
RU2292271C2 |
МАНИПУЛЯТОР, содержащий схват, механизм перемещения, включающий блок регулирования скорости и ;механические ветви - транспортную и подъемную, и привод, отличающийся тем, что, с целью повышения надежности в работе и точности позиционирования, блок регулирования скорости и механические ветви выполнены каждые в виде дифференциальнолланетарных рядов, причем водило дифференциально-планетарного ряда блока регулирования скорости жестко связано с солнечной шестерней дифференциально-планетарного ряда механических ветвей, при этом подъемная ветвь снабжена самотормозящей парой, ведущий элемент которой кинематически связан с эпициклическим колесом дифференциаль но-планетарного ряда механических ветвей посредством дополнительных шестерни и тормозной муфты, а транспортная ветвь снабжена g зубчато-реечной передачей, шестерня л которой жестко связана с водилом диф ференциально-планетарного ряда механических ветвей.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1977 |
|
SU655522A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
