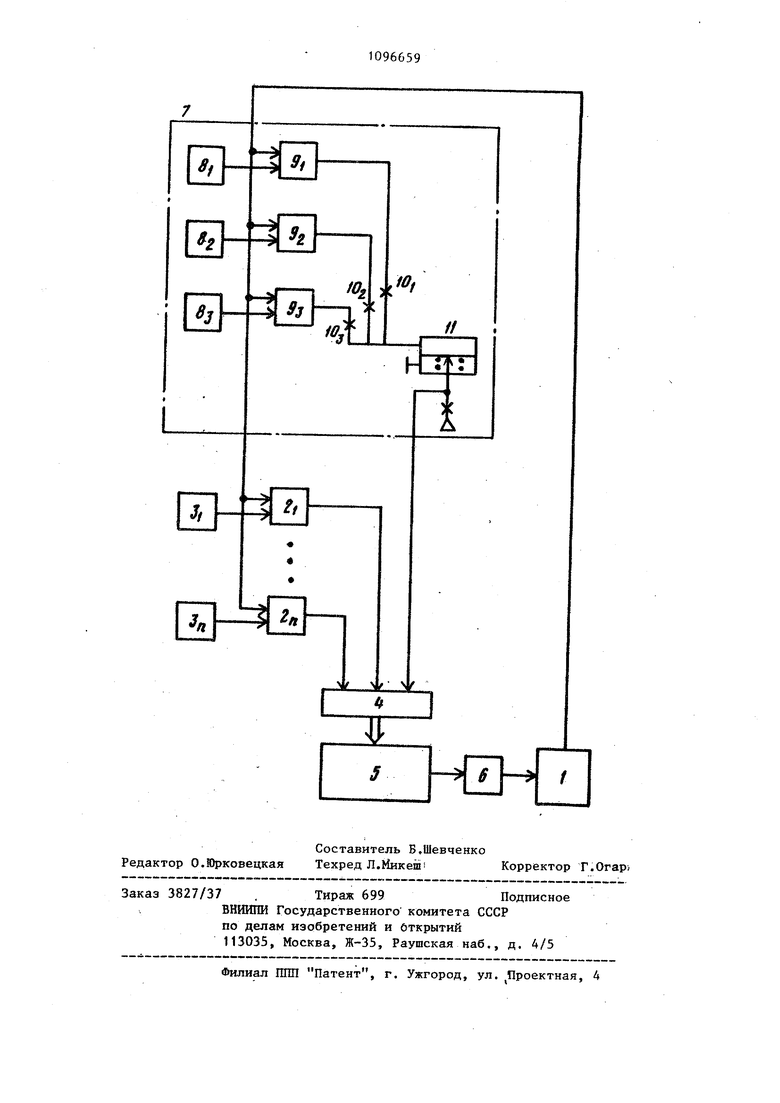
Изобретение относится к системам ввода информации в ЭВМ и может бытб использованб для сопряжения пневматических датчиков с ЭВМ. Известны системы ввода информации от пневматических датчиков в ЭВМ, содержащие элементы сравнения, генератор пилообразных импульсов, аналоговый пневмоэлектрический преобразователь, цифроаналоговый преобразователь, регистр ввода инициативных сиг налов и триггер вывода дискретных сигналов lj . Однако систе.1Ы обладают сложной конструкцией. Наиболее близкой к изобретению яв ляется система ввода информации от пневматических датчиков в ЭВМ, содержа щая триггер,соединенный с входом генератора пилообразных импульсов, выход которого соединен с первьми входами измерительных элементов сравнения, в рые входы которьрс соединены с датчик ми пневматических сигналов,а выходы с входами регистра ввоДа. инициативных сигналов, и блок коррекции, состоящий из первого опорного элемента сравнения, первый вход которого соединен с первым задатчиком, «а второй вход первого опорного элемента сравнения соединен с выходом гене ратора пилообразных импульсов . Недостатком известных устройств является низкая надежность, обусловленная погрешностями в преобразоваНИИ аналог-код. Целью изобретения является повыше ние надежности системы. Поставленная цель достигается тем., что в системе ввода информации от пневматических Датчиков в ЭВМ, со держащей триггер, соединенный с входом генератора пилообразных импульсов, выход которого соединен с первыми входами измерительных элементов сравнения, вторые входы которых соединены с датчиками пневматических сигналов, а выходы - с входами регис ра ввода инициативных сигналов, и блок коррекции, состоящий из первого опорного элемента сравнения, первый вход которого соединен с первым задатчиком, а второй вход первого опорного элемента сравнения соединен с выходом генератора пилообразных импульсов, в блоке коррекции дополнительно установлены второй и третий задатчики, второй и третий опорные элементы сравнения, первый, второй и третий дроссели и пороговый элемент, выход которого соединен с входом регистра ввода инициативных сигналов, входы порогового элемента через первый, второй и третий дроссели соединены соответственно с выходами первого, второго и третьего опорных элементов сравнения, первые входы второго и третьего опорных элементов сравнения соединены соответственно с выходами вто рого и третьего яадатчиков, а вторые входы второго и третьего опорных элементов сравнения соединены с выходом генератора пилообразных импульсов. На чертеже приведена принципиальная схема предложенной системы. Система содержит генератор 1 пилообразных импульсов, измерительные элементы 2.-2 сравнения, датчики 3,1 пневматических сигналов, регистр 4 ввода инициативных сигналов, соединенный с входом электронной вычислительной машины (ЭВМ) 5, триггер 6 вывода дискретных сигналов, блок 7 коррекции, состоящий из задатчиков , опорных элементов 9v| - 9j сравнения, дросселей tO и порогового элемента 11. Назначение системы - ввод информации от пневмодатчиков в ЭВМ, т.е. преобразование пневматических сигналов стандартного диапазона в цифровой код. Система работает следующим образом. ЭВМ программным путем через триггер 6 управляет работой генератора 1 пилообразных импульсов, т.е. осуществляет ввод начальных условий (атмосферное давление) и запускает генератор. (opмa импульсов описывается линейной зависимостью где Ррц - давление на выходе генератора 1; - скорость изменения давления. В момент сравнения {. одного из входных сигналов с сигналом развертки Pj срабатывает соотвествующий элемент 2,;; сравнения, выходной сигнгш которого через регистр 4 ввода инициативных сигналов вырабатывает В ЭВМ сигнал прерывания, по которому фиксируется врейя срабатывания t; Кроме того, в каждом цикле преобразования ЭВМ определяет время Т прохож дения линейного пилообразного сигнала Pfy от нуля до опорного уровня 1,0 кгс/см Время Т определяется ЭВМ от момента запуска генератора 1 до момента срабатывания порогового элемента 11. По результатам измерений ЭВМ рассчиты вает К 1 /Т и истинные значения сигналов пневмодатчиков IP Y- iРезультаты вычислений (в форме машинного слова - цифрового кода соот ветствующей длины) заносятся в соответствующую ячейку оперативного запоминающего устройства. Из-за разброса и нестабильности характеристик элементов 8 и 9 блока 7 коррекции срабатывание элеменТ.ОВ 9 сравнения происходит неодновременно в моменты i, , i/n и t .При ис-r. пользовании идентичных дросселей 10 Элемент 11 настраивают в соответствии с выражением о зРьРср- Рь, .(21 уровень срабатывания порогового элемента 11; давление,, соответствующее состоянию Логическая единица элемента 9 сравнения (давление питания). Пороговый элемент переходит в единичное состояние в момент времени i2 , когда срабатьгеают любые два их трех элементов 9 сравнения. Иными словами, сигнал на выходе порогового элемента позволяет инициировать медиану (среднюю по величине) моментов t 2 В мстент времени i2 фиксируемый ЭВМ, происходит запуск программы коррекции (расчет параметра генератора 1) и расчет значений сигналов датчиков по формуле (1). После этого производится перезапуск генератора пилообразных импульсов и начинается новый цикл преобразования. Преимущество предложенной системы по сравнению с известной заключается в повышении надежности и точ:1ости, причем погрешность-преобразования аналог-код уменьшается примерно в 1,5 раза.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система ввода информации от пневматических датчиков в электронную вычислительную машину | 1987 |
|
SU1443005A2 |
| Устройство для ввода информации | 1979 |
|
SU830364A1 |
| Устройство для ввода информации с пневматических датчиков в электронную цифровую вычислительную машину | 1976 |
|
SU643951A1 |
| Система управления технологическими процессами | 1982 |
|
SU1104561A2 |
| Устройство для регулирования давления | 1988 |
|
SU1674075A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПАРАМЕТРОВ НАПРЯЖЕНИЯ | 1990 |
|
RU2018147C1 |
| Устройство для регулирования расхода | 1986 |
|
SU1377832A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |
| Устройство для испытаний датчиков давления | 1983 |
|
SU1129624A1 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
СИСТЕМА ВВОДА ИНФОРМАЦИИ ОТ ПНЕВМАТИЧЕСКИХ ДАТЧИКОВ В ЭЛЕКТРОННУЮ ВЫЧИСЛИТЕЛЬНУЮ МАШИНУ, содержащая триггер, соединенный с входом генератора пилообразных импульсов, выхс которого соединен с первыми входами измерительных элементов сравнения, вторые входы которых соединены с датчиками пневматических сигналов, а выходы - с входами регистра ввода им циативных сигналов, и блок коррекбЙйлЬОх а.т ции, состоящий из первого опорного элемента сравнения, первый вход которого соединен с первым задатником, а второй вход первого опорного элемента сравнения соединен с выходом генератора пилообразных импульсов, о тличающаяся тем, что, с целью повышения ее надежности, блок коррекции дополнительно содержит второй и третий задатчики, второй и третий опорные элементы сравнения, первый второй и третий дроссели и пороговый элемент, выход которого соединен с входом регистра ввода инициативных сигналов, входы порогового элемента через первый, второй и третий дроссели соединены соответствен(Л но с выходами первого, второго и третьего опорных элементов сравнения, 1первые входы второго и третьего опор ных элементов сравнения соединены соответственно с выходами второго и третьего задатчиков, а вторые входы второго и третьего onopHEsix элементов сравнения соединены с выходом генератора пилообразных импульсов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для ввода информации с пневматических датчиков в электронную цифровую вычислительную машину | 1976 |
|
SU643951A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 1979 |
|
SU826389A1 | |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
