lAi
2, датчики пневматических сигналов 3,..,3, регистр ввода инициативных сигналов А, соединенный с входом электронной вычислительной машины (ЭВМ) 5, триггер вьшода дискретньтх сигналов 6, блок коррекции 7, состоящий из задатчиков 8,.,,8j, опорных элементов сравнения 9,,,9 дросселей 10,.,.10} и порогового элемента I1, эадатчики верхних предельных значений параметров 12..,12, эадатчики нижних предельных значений параметров 13i,..13f,, элементы сравнени г для
005
верхних предельных значений параметров 14...1А, элементы сравнения для нижних предельных значений параметров 15...15, логические блоки I6, ,.. 16„, элемент ИЛИ 17. При достижении одними или несколькими кон- тро-лируемыми параметрами заданных предельных значений срабатывают со- ответствугоп(ие элементы сравнения, логические блоки и элемент ИЛИ , регистр ввода сигналов и включается про.граммй ЭВМ для опроса и измерения параметров, 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система ввода информации от пневматических датчиков в электронную вычислитеную машину | 1983 |
|
SU1096659A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПАРАМЕТРОВ НАПРЯЖЕНИЯ | 1990 |
|
RU2018147C1 |
| МИКРОПРОЦЕССОР ВВОДА-ВЫВОДА ИНФОРМАЦИИ | 1992 |
|
RU2042182C1 |
| Система управления электрическим режимом дуговых электропечей при групповой работе в часы максимума потребления электроэнергии | 1980 |
|
SU1162063A1 |
| Система управления электрическим режимом дуговых электропечей при групповой работе в часы максимума активной нагрузки энергосистемы | 1988 |
|
SU1577083A1 |
| Система автоматического регулирования вытяжки непрерывной полосы | 1988 |
|
SU1570814A1 |
| Система управления электрическим режимом группы дуговых электропечей в часы максимума активной нагрузки энергосистемы | 1989 |
|
SU1624707A1 |
| Устройство для ввода дискретной информации | 1986 |
|
SU1425634A1 |
| Многоканальное усредняющее устройство | 1978 |
|
SU744609A1 |
| Устройство для исследования пульсовой динамики сердечно-сосудистой системы | 1987 |
|
SU1512561A1 |
Изобретение относится к приборостроению и используется в информационно-измерительных системах для контроля различных технологических параметров. Данная система позволяет повысить быстродействие путем уменьшения числа .циклов измерения при контроле предельных значений измеряемых параметров. Система содержит генератор пилообразных импульсов 1, измерительные злементы сравнения 2,... v7 4 4: СО ю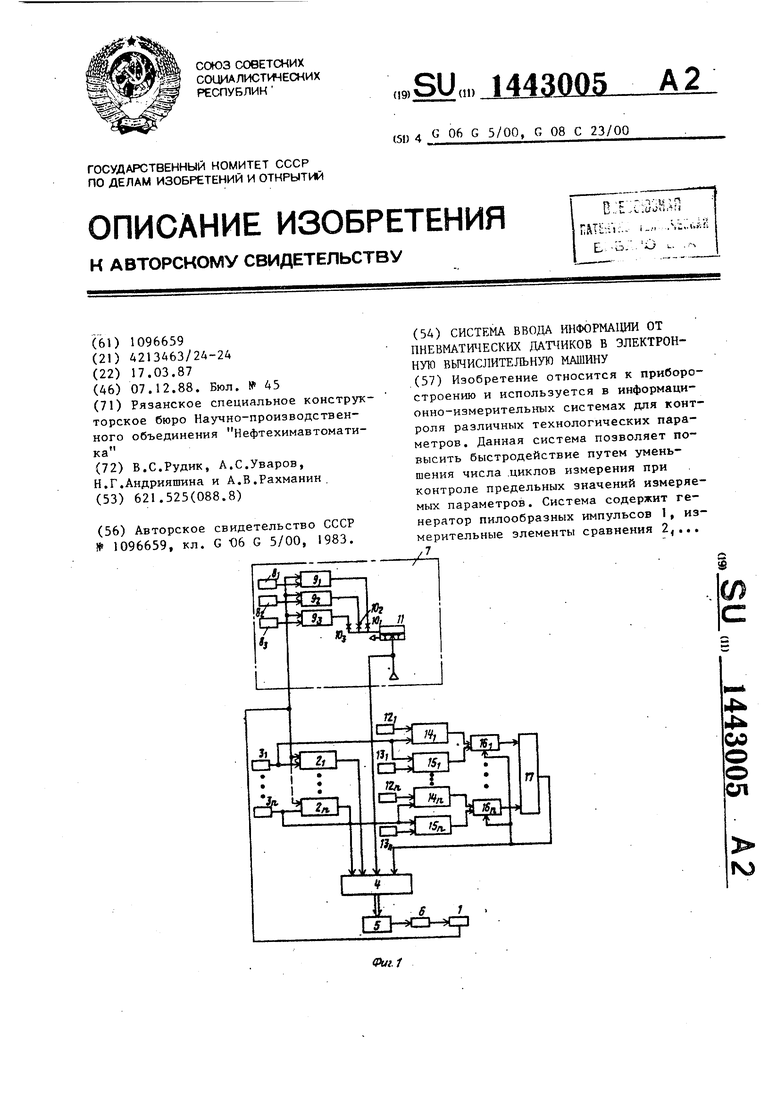
1
Изобретение относится к йистемам ввода информации в электронную вычислительную машину (ЭВМ)5 может быть использовано для сопряжения пневматических датчиков с ЭВМ и является усовершенствованием изобретения по авт. св. № 1096659.
Цель изобретения - повышение быстродействия системы путем уменьшения числа циклов измерения при контроле предельных значений измеряемых параметров ,
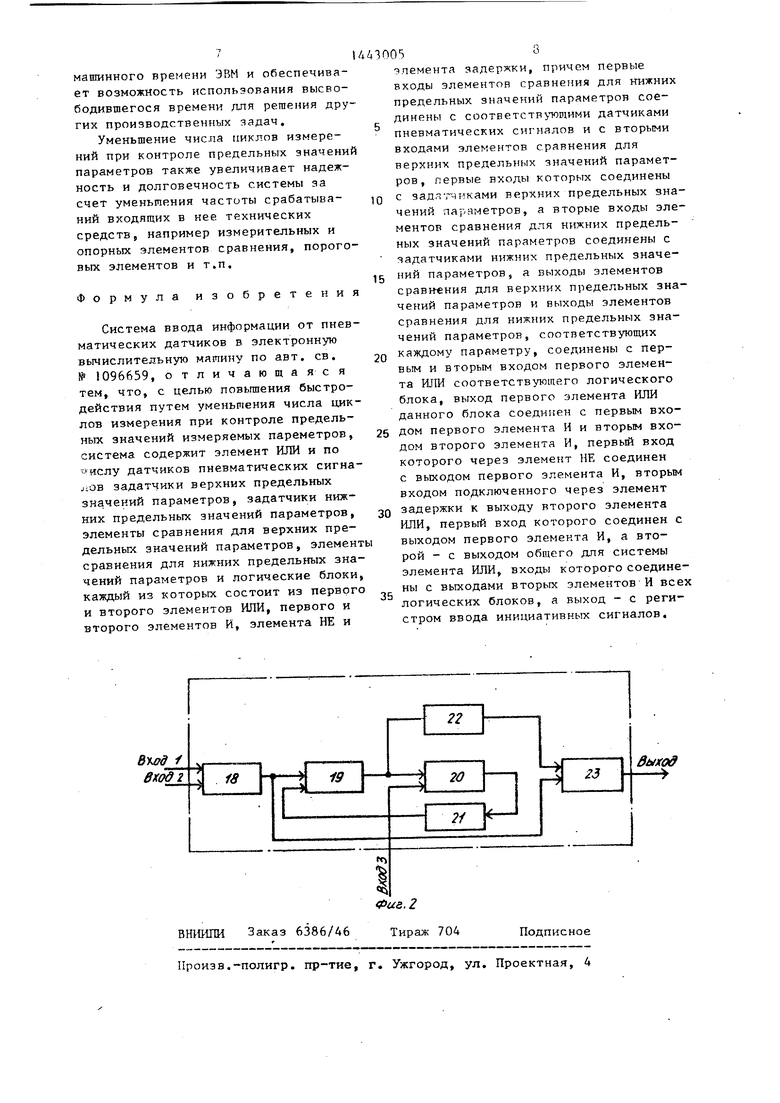
На фиг. 1 приведена структурная схема пр 1 дла аемой системы; на фиг, 2 - схема логического блока.
Система содержит генератор пилообразных импульсовJ измерительные элементы 2..„2„ сравнения, датчики 3,.оЗ пневматических сигналов ре- гистр 4 ввода инициативных сигналов соединенный с входом ЭВМ 5, трип ер 6 вьгоода дискретных сигналов, блок коррекции, состоящий иэ задатчиког:
8,
8,, опорных элементов 9«.,.9:1
сравнения, дросселей 10(....10з и порогового элемента 11, эадатчики 12,.„,12„ верхних предельных значений параметров, задатчики 13..„13„ нижних предельных значений парамет- ров J элементы 1 4 ,. . 1 «i (, сравнения ,для верхних предельных значений параметров, элементы 15.,.15 сравнения для нижних предельных значений параметров, логические блоки Гб,,., 1 6 f, и элемент Ш1И 1 7 .
Выходы датчиков 3,...3 пневматических сигналов соединены с вторыми
входами измерительных элементов 2 ...2у, сравнения, вторыми входами элементов 14,...4 сравнения для верхних предельных значений параметров. Первые входы элементов 4,. 4 и 15,.,.15f, соединены соответственно с выходами задатчиков 12...2f, верхних предельных значений параметров и выходами задатчиков 13(...13f нижних предельных значений параметров.
Выходы элементов 14...14 сравнения для верхних предельных значений параметров и выходы элементов 5... 5(, сравнения для нижних предельных значений параметров соединены соответственно с первым и вторым входами логических блоков 16(..,16,, выходы которых подключены к входам элемента ИЛИ 17, выход которого соединен с третьими входами логических блоков б4...6(, и первьт входом регистра 4 ввода инициативных сигналов, соединенного с входом ЭВМ 5, выход которой через триггер 6 вьюода дискретны сигналов подключен к входу генератора 1 пилообразных импульсов, выход которого соединен с первыми входами измерительных элементов 2,,.2. сравнения и через первый вход блока 7 коррекции с первыми входами опорн гх элементов 9,...9з сравнения, вторые входы которых подключены к выходам эадатчиков 8(.,.8, а выходы через дроссели 10 .... lOj соединены с входом порогового элемента 11, выход
которого через выход блока 7 коррекции соединен с вторым входом регистра 4 ввода инициативных сигналов, остальные входы которого подключены к выходам измерительных элементов 2 ...2 сравнения.
Логический блок содержит первый элемент ИЛИ 13, первый элемент И 19 второй элемент ИЛИ 20, элемент 21 задержки, элемент НЕ 22 и второй элемент И 23.
Первый и второй входы первого элемента ИЛИ 18 соединены соответственно с первым и вторым входами блока а выход - с первым входом первого элемента И 19 и вторым входом второго элемента И 23. Второй вход второго элемента ИЛИ 20 соединен с третьим входом, т.е. с выходом общего для системы элемента ИЛИ 17 блока, а выход через элемент 21 задержки с вторым входом первого элемента И 19, выход которого подключен к первому входу второго элемента ИЛИ 20. Выход первого элемента И 19 подключен также через элемент НЕ 22 к первому входу второго элемента И 23 выход которого с выходом блока (т.е. с соответствующим входом элемента ИЛИ 17),
Система работает следующим образом. .
ЭВМ 5 программным путем через триггер 6 управляет работой пенера- тора 1 пилообразных импульсов, т.е. запускает его через определенные промежутки времени. Форма импульсов сигнала развертки генератора 1 описывается линейной зависимостью
н « где Р - давление сжатого воздуха
на входе генератора 1; К - скорость изменения давления.
В момент tj сравнения одного из входных сигналов , с сигналом развертки Р,„срабатывает соответствую(-1
щий измерительный элемент 2- сравнения, выходной сигнал которого через регистр 4 ввода инициативных сигналов вырабатывает в ЭВМ сигнал прерывания, по которому фиксируется время срабатьшания t .
В каждом цикле преобразования ЭВМ определяет время Т изменения линейного сигнала
ГЦ
от нуля до
опорного уровня, например 0,1 МПа
4ДТП05
(I,О кгс/см), Время Т определяется ЭВМ от момента запуска генератора 1 до момента срабатывания порогового
элемента 11.
Ввиду разброса и нестабильности характеристик элементов 8 и 9 блока 7 коррекции срабатьгоание элементов 9 сравнения может происходить неод- новргк енно в моменты времени t, t и 1,„ ;1рн использовании идентичных дросселей 10 элемент 11 настраивают в соответствии с выражением
5, -Р,,
где Р - уровень срабатьшания порогового элемента 11; Р. - давление, соответствуюU
щее состоянию логической
единицы элемен та 9 сравнения „
Пороговый элемент 11 переходит в единичное состояние в момент времени t срабатывания любых двух из трех элементов 9 сравнения. Выходной сигнал порогового элемента I1 через регистр А ввода инициативных сигналов вырабатывается в ЭВМ 5 сигнал прерьшания, по которому фиксируется момент времени t и происходит запуск программы расчета параметров генератора 1 и значений сигналов датчиков PJ по формулам (с учетом того,
макс 1 0 кгс/см)
i: i. р. i : . Т Т 1
Новый цикл измерения прбисходит
через интервал времени, заложенный в программе, если в этот период не произойдет достижение каким-либо параметром заданного предельного (верхнего или нижнего) значения.
При достижении каким-либо пара- метром Р- заданного верхнего (нижнего) предельного значения, .установленного задатчиком 12, (13,-) срабатывает элемент 14j (15) сравнеНИН верхнего (нижнего) предельного значения, выходной единичный сигнал которого поступает на первый (второй) вход логического блока 1 6, , ко торый вырабатывает на выходе единичный.
сигнал, поступающий на один из вхоов элемента ИЛИ 17, При поступлении на вход элемента ИЛИ 17 хотя бы от одного из логических блоков 16...6, единичного сигнала на выходе элемента ИЛИ I7 появляется единичный выходной сигнал, который через регистр А ввода инициативных сигналов вырабатывает в ЭВМ 5 сигнал прерьшания, по которому происходит следующий цикл измерения параметров описанным выше образом. Одновременно выходной сигнал элемента ИЛИ 17 поступает на третьи входы логических блоков 6, 16.,5 сбрасьтая в О те выходы логических блоков, которые бьши равны и I It
1 9
Следующий цикл измерения происходит при достижении другими параметрами заданных предельных значений или в момент времени, определенный программой ЭВМ
Логический блок работает следующим образом.
При поступлении на один из входов первого элемента ИЛИ 8 сигнала логической на выходе его -появляется единичный сигнал, который посту пает на второй вход второго элемента И 23 и первый вход первого элемента И 19.
Если на втором входе второго элемента ИЛИ 20 присутствует сигнал логргческого О, то и выход оказывается равным так как на первый вход его тоже поступает нулевой сигнал от первого элемента И 19, который не срабатывает, потому что толь ko на первом входе этого элемента присутствует сигнал логической 1, а на втором О.
Проходя через элемент НЕ. 22,. выходной, нулевой сигнал первого элемента И 19 инвертируется, в результа те чего на первый вход второго элемента И 23 поступает уже сигнал логической , На втором входе З того же элемента присутствует.также единичный сигнал с выхода первого эле- мента ИЛИ 18, поэтому он срабатьша- ет и на его выходе, а соответственно и на выходе блока появляется единичный сигнал.
Когда на второй вход второго элемента ИЛИ 20 через третий вход логического блока поступает сигнал логической 1, он срабатывает и его единичный выходной сигнал по истечении времени, определяемого элементом 21 задержки, поступает на BTOJJOH вхо первого элемента И 19, Тогда на обоих входах первого элемента И 19 присутствуют единичные сигналы, в ре
Ш
15
20
Л430056
зультате чего на его выходе тоже появляется единичный сигнал, который, проходя через элемент НЕ 22, инвертируется и обнуляет второй элемент И 23 - выходной сигнал блока становится равным О. Если после этого на-третьем входе появ/шелся снова единичный сигнал, то нулевой выход блока не изменяется.
Элемент 2 используется для задержки единичного выходного сигнала логического блока при достижении каким-либо контролируемым параметром предельного значения с целью надежного срабатывания программы опроса ЭВМ, Время задержки устанавливается ориентировочно О...1с в зависимости от конкретных типов используемых элементов системы. При нулевых входах блок независимо от значения сигнала на третьем входе выход блока равен логическому
Таким образом, при достижении од- 25 ним или несколькими контролируемыми параметрами заданных предельных значений срабатывают соответст.вуюшие ЭЛР менты сравнения предельных значений параметров, логические блоки и в. ходной элемент ИЛИ, сигнал которого через регистр ввода инициативных сигналов управляет включением программы ЭВМ для опроса и измерения параметров (через программу обработки прерываний) ,
Доследующий цикл измерения параметров происходит в следующих случаях t
наступает момент времени программного определения значений параметров;
другие параметры достигают заданных предельных значений;
параметры, которые вызьшали даи- 45 ный цикл измерения, входят s SCHV допредельных значений, после чэго хотя бы один из них вновь достигает заданного предельного значения,,
В предлагаемой системе в отличие от известной при контроле предельных значений параметров измерения осуществляется только я моменты достижения. ими задаргньгх предельных величин, чем обеспечивается значительное уменьшение числа циклов измерения, а также уменьшение использования ма- шинного времени ЭВМ, что приводит :. снижению непроизводите:. потерь
30
40
50
55
машинного времени ЭВМ и обеспечивает возможность использования высвободившегося времени лля решения других производственных задач,
Уменьшение числа циклов измерений при контроле предельных значений параметров также увеличивает надежность и долговечность системы эа счет уменьшения частоты срабатываний входящих в нее технических средств, например измерительных и опорных элементов сравнения, пороговых элементов и т.п.
Формула изобретения
Система ввода информации от пневматических датчиков в электронную вычислительную машину по авт. св. № 1096659, отличающаяся тем, что, с целью повышения быстродействия путем уменьшения числа циклов измерения при контроле предельных значений измеряемых пареметров, система содержит элемент ИЛИ и по ислу датчиков пневматических сигна- jiOB задатчики верхних предельных значений параметров, задатчики нижних предельных значений параметров, элементы сравнения для верхних предельных значений параметров, элемент сравнения для нижних предельных значений параметров и логические блоки, каждый из которых состоит из первого и второго элементов ИЛИ, первого и второго элементов И, элемента НЕ и
элемента задержки, причем первые входы элементов сравнения для нижних предельных значений параметров соединены с соответструтошими датчиками пневматических сигналов и с вторыми входами элементов сравнения для верхних предельных значений параметров, первые входы которьтх соединены с задлтчиками верхних предельных значений параметров, а вторые входы элементов сравнения для нижних предельных значений параметров соединены с задатчиками нижних предельных значений параметров, а выходы элементов сравнения для верхних предельных значений параметров и выходы элементов сравнения для нижних предельных значений параметров, соответствующих каткдому параметру, соединены с первым и вторым входом первого элемента ИЛИ соответствующего логического блока, выход первого элемента ИЛИ данного блока соединен с первым входом первого элемента И и вторым входом второго элемента И, первый вход которого через элемент НЕ соединен с выходом первого элемента И, вторым входом подключенного через элемент задержки к выходу второго элемента ИЛИ, первый вход которого соединен с выходом первого элемента И, а второй - с выходом общего для системы элемента ИЛИ, входы которого соединены с выходами вторых элементов И всех логических блоков, а выход - с регистром ввода инициативных сигналов.
| Система ввода информации от пневматических датчиков в электронную вычислитеную машину | 1983 |
|
SU1096659A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
