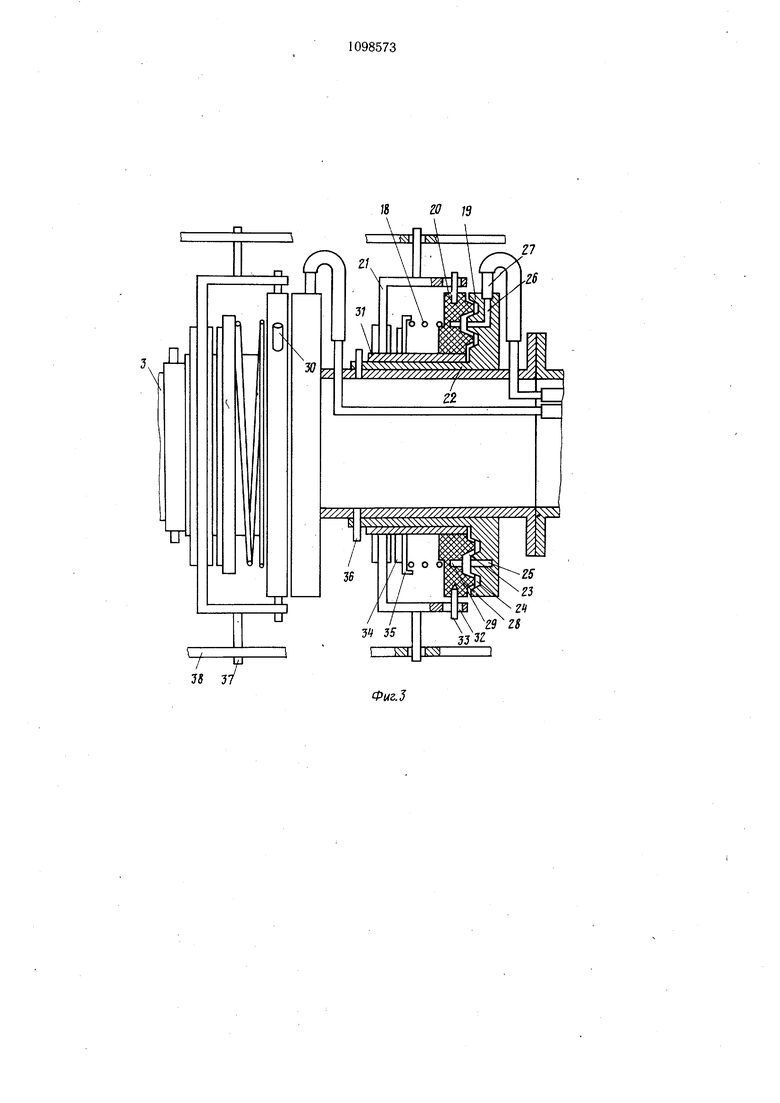
Изобретение относится к обогащению полезных ископаемых методом пенной флотации и может быть использовано для оперативного управления процессом съема пенного продукта с поверхности пульпы в флотомашинах. Известно устройство для съема пенного продукта с поверхности пульпы флотомашины, привод которого выполнен в виде кривошипно-рычажного механизма с отклоняющим приспособлением 1. Недостатком устройства является невозможность оперативного изменения величины зоны захвата пены, поскольку для этой цели необходимо остановить оборудование и выполнить монтажные работы по перестановке отклоняющего приспособления. Известно устройство для съема пенного продукта флотационных машин, содержащее пеносниматель с гребками, размещенный на валу, привод и механизм регулирования скорости движения и глубины погружения гребков пеноснимателя в пену 2. В известном устройстве пеносниматели приводятся в возвратно-поступательное движение коромыслами, связанными с вращающимся диском с помощью эксцентрикового пальца. Регулирование амплитуды хода гребков и линейной скорости его движения производится уменьшением или увеличением эксцентриситета пальца на диске или изменением длины плеча на рычагах пеноснимателя; Для этого необходимо провести соответствующие монтажные работы. Недостатком известного устройства является невозможность оперативного регулирования процесса съема пенного продукта при автоматическом управлении процессом флотации. Кроме того, в ряде случаев возникает необходимость регулировать съем пены вотдельных камерах флотомащины, для которой привод пеногона является общим. Это определяет ограничения по интенсификации процесса флотации. Целью изобретения является интенсификация процесса флотации за счет изменения траектории движения гребка. Поставленная цель достигается тем, что устройство для съема пенного продукта флотационных машин, содержащее пеносниматель с гребками, размещенный на валу, привод снабжено последовательно соединенными датчиком положения вала пеноснимателя, блоком коррекции траектории движения гребков пеноснимателя, узлом передачи пневмосигнала коррекции траектории движения гребков пеноснимателя и силовым приводом механизма регулирования скорости, движения и глубины погружения фебков пеноснимателя, причем узел передачи пневмосигналов содержит два прилегающие один к другому под действием пружины диска и скобу, причем первый диск имеет втулку для жесткой связи с валом, два кольцевых желоба с прокладками в них и кольцевой желоб с пневмоканалом, соединенным с выходным штуцером, а второй диск выполнен с кольцевыми выступами и кольцевым желобом, соединенным пневмоканалом с входными штуцером, второй диск расположен свободно на другой втулке, которая скользяще посажена на втулку первого диска, скоба жестко закреплена на втулке второго диска и имеет на концах продольные пазы, через которые проходят стержни, закрепленные на втором диске. На фиг. 1 представлено предлагаемое устройство общий вид; на фиг. 2 - пеносниматель с гребком; на фиг. 3 - узлы передачи пневмосигналов; на фиг. 4 - схема, поясняющая работу устройства. Устройство для съема пенного продукта (фиг. 1) монтируется на камере флотомащины 1 и содержит привод 2, вал 3, пеносниматель 4 с гребком 5, узел 6 передачи пневмосигналов коррекции траектории движения гребков пеноснимателя, датчик 7 положения вала пеноснимателя, блок 8 коррекции траектории движения гребков пеноснимателя и блок 9 выбора режима работы. Для удобства монтажа устройства пеносниматель закреплен на переходном патрубке 10 (.фиг. 2) Пневмоприводы 11 и 12 узла б передачи пневмосигналов соединены с пеноснимателями через штуцеры 13 и 14, закрепленные на переходном патрубке 10. К штоку 15 пеноснимателя жестко прикреплен плоский стержень 16, расположенный вдоль корпуса пеноснимателя между двумг. пластинами 17, закрепленными на корпусе. Вал 3 выполнен из трубы, внутри которой проложены пневмопроводы, соединяющие узлы передачи пневмосигналов с пеноснимателем, представляющим собой силовой привод механизма регулирования скорости движения и глубины погружения гребков пеноснимателя. Узел передачи пневмосигнала монтируется на одном из концов вала 3, выходящего за габариты корпуса флотомашины. Узел (фиг. 3) содержит два плотно прилегающих один к другому под действием пружины 18 диска 19 и 20 и скобу 21. Первый диск 19 содержит втулку 22 и выполнен с двумя кольцевыми желобами 23 с фторопластовыми прокладками 24 и с кольцевым желобом 25, имеющим пневмоканал 26, соединенный с выходным штуцером 27. Второй диск 20 выполнен с кольцевыми выступами 28, размеры которых соответствуют размерам кольцевых желобов 23 первого диска. Пружина 18 обеспечивает плотный контакт выступов 28 с прокладками 24. Второй диск также имеет расположенный между выступами кольцевой желоб 29, соединенный пневмоканалом с входным щтуцером 30. Диск 20 свободно расположен на втулке 31, которая скользяще посажена на втулке 22. Скоба 21 жестко закреплена на втулке 31 и имеет на концах продольные пазы 32, в которых расположены стержни 33, закрепленные на диске 20. Сжатие пружины осуществляется изменением положения гайки 34 и щайбы 35. Втулка 22 жестко связана с валом 3 с помощью винта 36. Фиксация положения скобы 21 и тем самым диска 20 относительно диска 19, осуществлена винтами 37, расположенными в пазах корпуса 38 узла передачи пневмосигнала. Датчик положения вала содержит сельсин-датчик, связанный механически с валом 4, и электропневматический преобразователь, выход которого соединен с одним из входов блока 8. Блок 8 собран из элементов УСЭППА и содержит последовательно соединенные блоки деления, умножения и суммирования. Блок 9 выбора режима работы содержит редуктор давления, манометр и кран - переключатель. Устройство работает следующим образом. На блок 9 выбора режима работы подают сигнал начального командного давления , соответствующий требуемой величине съема пенного продукта. Сигнал изменяется либо вручную с помощью редуктора давления, либо от системы автоматического регулирования. Сигнал сигнал Рд с датчика 7 положения вала 3 поступают на блок 8, который формирует выход ной командный сигнал Р При минимальной величине командного сигнала Р гребок описывает траекторию 39 (фиг. 4). При большем командном сигнале, т. е. при большем выходе штока 15, в зоне, близкой к стенке флотомашины, необходимо постепенно уменьшать командный сигнал вплоть до Р . С этой целью с датчика 7 положения вала 3 на один из входов блока 8 подается сигнал, пропорциональный углу поворота вала Рд, а на другой вход - начальный командный сигнал Р С помощью блоков деления, умножения и суммирования в блоке 8 рассчитывается выходной командный сигнал. Г)ВЫХ --ноч Ра. /Г)) ч С ет где Нщ- сигнал, соответствующий углу поворота валао мах. При углах noBopOTaai dijiii JJ-O скорректированный сигнал Р обеспечивает движение гребка пеноснимателя по трагектории 40 (фиг. 4). Сигнал Рд поступает на вход узла передачи пневмосигнала и далее через пневмопривод 11 и штуцер 13 (фиг. 2) на пеносниматель. Шток 15 занимает положение, соответствующее Р . Удержание штока в заданном положении обеспечивается подачей на пеносниматель сигнала рабочего давления Рр через пневмопривод 12 и штуцер 14. Передача сигнала Рр осуществляется через второй узел передачи пневмосигналов. При вращении вала 3 вращается также втулка 22 и вместе с ней диск 19 (фиг. 3). Диск 20 не вращается, поскольку с помощью стержней 33, скобы 21 и винтов 37 связан с неподвижным корпусом 38 узла передачи пневмосигналов и имеет принципиальную возможность перемещаться только вдоль втулки 31. При работе устройства диск 20 плотно прижат пружиной 18 выступами 28 к фторопластовым орокладкам 24, которые вращаются вместе с диском 19. Таким образом обеспечивается герметичность при передаче пневмосигналов через кольцевой желоб 29 диска 20 к кольцевому желобу 25 вращающегося диска 19. В результате сигналы Рр передаются на пневмоприводы 11 и 12 и далее на пеносниматель.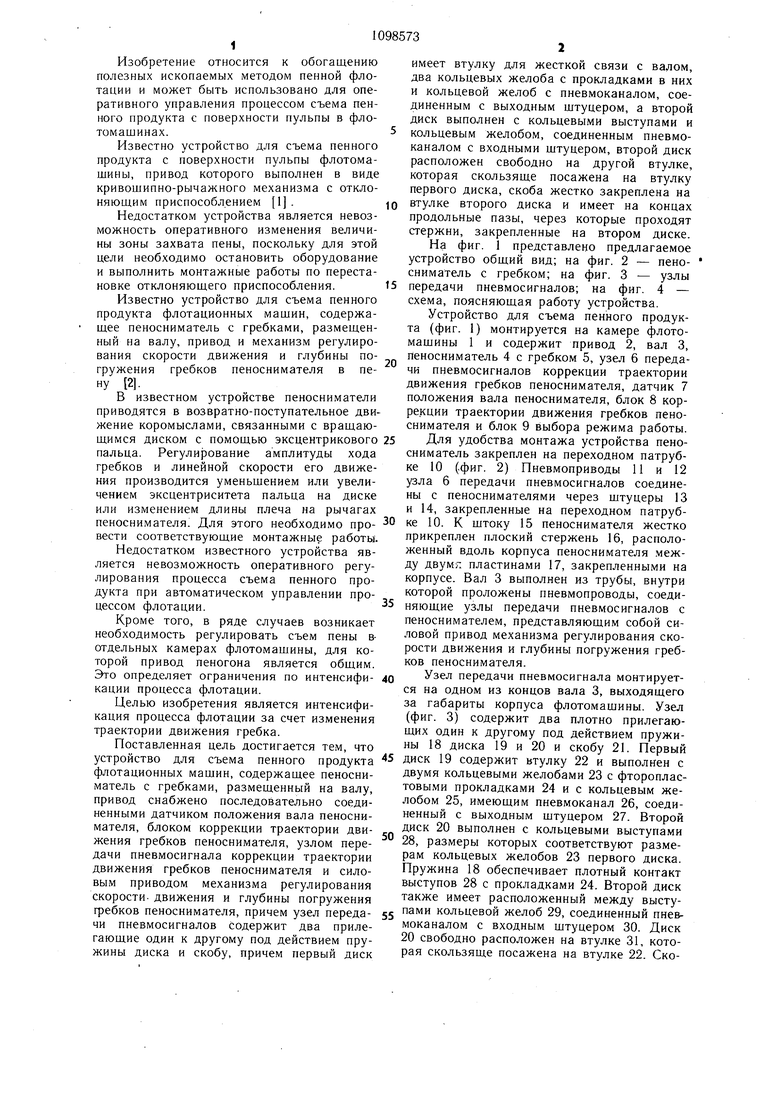

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для съема пенного продукта | 1969 |
|
SU460894A1 |
| ФЛОТАЦИОННАЯ МАШИНА | 1992 |
|
RU2038862C1 |
| УЗЕЛ УДАЛЕНИЯ ПЕНЫ ФЛОТАЦИОННОЙ МАШИНЫ | 2005 |
|
RU2292954C1 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2261977C1 |
| Устройство для съема пенного продукта флотационных машин | 1981 |
|
SU950445A1 |
| Устройство для съема пенного продукта | 1988 |
|
SU1567279A1 |
| Приспособление для отделения пены через сливной порог в флотационных машинах механического и пневматического типа | 1939 |
|
SU56869A1 |
| Вибрационная флотационная машина | 1979 |
|
SU869819A1 |
| ПНЕВМОТУРБОДВИГАТЕЛЬ ДЛЯ ПРИВОДА РУЧНОГО ИНСТРУМЕНТА | 1996 |
|
RU2080454C1 |
| Флотационная машина | 1979 |
|
SU942798A1 |
УСТРОЙСТВО ДЛЯ СЪЕМА ПЕННОГО ПРОДУКТА флотационных машин, содержащее пеносниматель с гребками, размещенный на валу, привод, отличающееся тем, что, с целью интенсификации процесса флотации за счет изменения траектории движения гребка пеноснимателя, оно снабжено последовательно соединенными датчиком положения вала пеноснимателя, блоком коррекции траектории движения гребков пеноснимателя, узлом передачи пневмосигнала коррекции траектории движения гребков пеноснимателя и силовым приводом механизма регулирования скорости движения и глубины погружения гребков пеноснимателя, причем узел передачи пневмосигналов содержит два прилегающие один к другому под действием пружины диска и скобу, причем первый диск имеет втулку для жесткой связи с валом, два кольцевых желоба с прокладками в них и кольцевой желоб с пневмоканалом, соединенным с выходным штуцером, а второй диск выполнен с кольцевыми выступами и кольцевым желобом, соединенным пневмоi каналом с входным штуцером, второй диск расположен свободно на другой втулке, (Л которая скользяще посажена на втулку первого диска, скоба жестко закреплена на втулке второго диска и имеет на концах продольные пазы, через которые проходят стержни, закрепленные на втором диске. 0 ОО сл 00 Ручное Автомат. Фиг.1
16
Щ
ФигЛ
Пульпа
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ СЪЕМА ПЕННОГО ПРОДУКТАС ПОВЕРХНОСТИ ПУЛЬПЫ ВО ФЛОТАЦИОННОЙМАШИНЕ | 1972 |
|
SU427738A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для съема пенного продукта | 1969 |
|
SU460894A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
