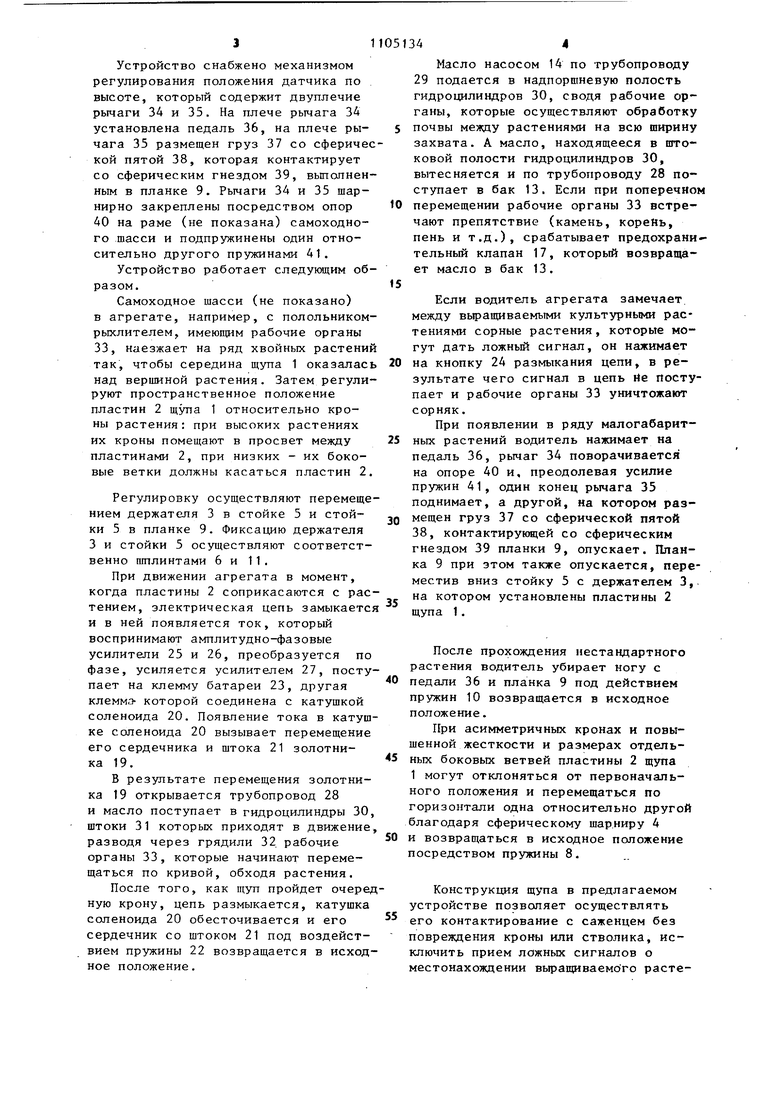
1 Изобретение относится к сельскому хозяйству, в частности к устройствам для автоматического управления почвообрабатьгоающим рабочим органом в ряду растений при их обра ботке путем седлания.и может быть использовано в лесном хозяйстве при обработке почвы в ряду одно- четырехлетных культур. Известно устройство для автоматического управления рабочим органом почвообрабатывающего орудия, содержащее щуп и связанный с ним исполнительный механизм 1 . Известно устройство для автоматического управления рабочим органо почвообрабатывающего орудия в ряду растений, содержащее щуп и связанны с ним исполнительньм механизм, при этом щуп закреплен на держателе, ко торый шарнирно установлен на подпру жиненной вертикальной стойке 21. В известных устройствах щуп вьто нен консольным и в процессе работы контактирует со стволиками (штамбам растений. При использовании таких щупов для обработки одно-, четь1рехлетних растений, имеющих незначител ные размеры по диаметру и высоте чистой части стволиков (без веток) и малонадежную связь корневой систе мы с почвой, возможно их повреждени Цель изобретения - уменьшение повреждаемости при обработке саженУказанная цель достигается тем, что устройство для автоматического управления рабочим органом почвообрабатывающего орудия в ряду растени снабжено механизмом регулирования щупа по высоте, причем щуп вьшолнен из двух симметрично расположенных вертикальных пластин, каждая из которых закреплена на держателе посре ством сферического шарнира и подпружинена относительно вертикальной стойки, а вертикальные стойки соеди нены между собой планкой, кинематически связанной с механизмом регули рования щупя по оыготе. Причем Mf.xaHH-tM регулирования щупа вьшолнен в виде двух подпружиненных двуплечих рычагов, на одном плече одного из котор гк установлена педаль, лечо другого рычага кинематически связано с п.паикой щупа, а свободные плечи рычагов контакти,рутот между собой. 42 Кроме того, пластины щупа имеют криволинейную форму и устарговлены друг к другу вогнутой стороной, На фиг. 1 показано предлагаемое устройство, вид в планер на фиг. 2 датчик, фронтальный вид на фиг. 3 механизм регулирования положения датчика по высоте. Устройство содержит щуп 1 и свяэанньА с ним исполнительный механизм. Щуп 1 состоит из двух симметрично расположенных пластин 2, каждая из которых закреплена на держателе 3 посредством сферического шарнира 4, Держатель 3 шарнирно установлен на стойке 5 и зафиксирован от вьтадения, например, шплинтом 6. Для изменения расстояния между пластинами 2 на каждом из держателей 3 выполнен ряд отверстий 7. Каждая из пластин 2 подпружинена пружиной 8 относительно стойки 5, подвижно установленной на планке 9 и подпружиненной пружиной 10 относительно нее. Для фиксации стойки на. планке 9 служит шплинт 11. Установка щупа 1 по высоте осуществляется посредством ряда регулировочных отверстий 12, имеющихся в стойке 5. Пластины 2 имеют криволинейную поверхность и обращены одна к другой вогнутой стороной. Исполнительный механизм включает бак 13 для масла гидросистемы, масля ный насос 14, заборную трубу 15, сливную трубу 16, предохранительный клапан 17, электрогидравлический распределитель 18, содержащий двухпозиционный золотник 19, соленоид 20, установленные на общем штоке 21, и пружину 22, возвращающую золотник 19 в исходное положение после обесточивания катушки соленоида 20. Распределитель 18 включен в электрическую цепь, питающуюся от батареи 23 и имеющую кнопку 24 размыкания цепи. В электрическую цепь входят амплитудно-фазовые усилители 23 и 26, воспринимающие сигнал от пластин 2 щупа 1, который затем поступает в усилитель 27. После усиления сигнал поступает на обмотку соленоида 20. Распределитель 18 сообщен посредством трубопроводов 28 и 29 с гидроципиндрами 30, штоки 31 которых соединены с грядилями 32 рабочих органов 33. Устройство снабжено механизмом регулирования положения датчика по высоте, который содержит двуплечие рычаги 34 и 35. На плече рычага 34 установлена педаль 36, на плече рычага 35 размещен груз 37 со сферичес кой пятой 38, которая контактирует со сферическим гнездом 39, выпопненным в планке 9. Рычаги 34 и 35 шарнирно закреплены посредством опор 40 на раме (не показана) самоходного шасси и подпружинены один относительно другого пружинами 41. Устройство работает следующим образом. Самоходное шасси (не показано) в агрегате, например, с полольником рьклителем, имеющим рабочие органы 33, наезжает на ряд хвойных растений так, чтобы середина щупа 1 оказалас над вершиной растения. Затем регули руют пространственное положение пластин 2 щупа 1 относительно кроны растения: при высоких растениях их кроны помещают в просвет между пластинами 2, при низких - их боковые ветки должны касаться пластин 2. Регулировку осуществляют перемеще нием держателя 3 в стойке 5 и стойки 5 в планке 9. Фиксацию держателя 3 и стойки 5 осуществляют соответственно птлинтами 6 и 11. При движении агрегата в момент, когда пластины 2 соприкасаются с рас тением, электрическая цепь замыкаетс и в ней появляется ток, который воспринимают амплитудно-фазовые усилители 25 и 26, преобразуется по фазе, усиляется усилителем 27, посту пает на клемму батареи 23, другая клемм.э- которой соединена с катушкой соленоида 20. Поякпение тока в катуш ке соленоида 20 вызывает перемещение его сердечника и штока 21 золотника 19. В результате перемещения золотника 19 открывается трубопровод 28 и масло поступает в гидроцилиндры 30 штоки 31 которых приходят в движение разводя через грядили 32. рабочие органы 33, которые начинают перемещаться по кривой, обходя растения. После того, как щуп пройдет очере ную крону, цепь размыкается, катушка соленоида 20 обесточивается и его сердечник со штоком 21 под воздействием пружины 22 возвращается в исход ное положение. 44 Масло насосом 14 по трубопроводу 29 подается в надпоршневую полость гидро цилиндров 30, сводя рабочие органы, которые осуществляют обработку почвы меязду растениями на всю ширину захвата. А масло, находящееся в штоковой полости гидроцилиндров 30, вытесняется и по трубопроводу 28 поступает в бак 13. Если при поперечном перемещении рабочие органы 33 встречают препятствие (камень, корень, пень и т.д.), срабатывает предохранительный клапан 17, который возвращает масло в бак 13. Если водитель агрегата замечает между выращиваемыми культурными растениями сорные растения, которые могут дать ложный сигнал, он нажимает на кнопку 24 размыкания цепи, в результате чего сигнал в цепь rte поступает и рабочие органы 33 уничтожают сорняк. При появлении в ряду малогабаритных растений водитель нажимает на педаль 36, рычаг 34 поворачивается на опоре 40 и, преодолевая усилие пружин 41, один конец рычага 35 поднимает, а другой, на котором размещен груз 37 со сферической пятой 38, контактирующей со сферическим гнездом 39 планки 9, опускает. Планка 9 при этом также опускается, переместив вниз стойку 5 с держателем 3,. на котором установлены пластины 2 щупа 1. После прохождения нестандартного растения водитель убирает ногу с педали 36 и планка 9 под действием пружин 10 возвращается в исходное положение. При асимметричных кронах и повышенной жесткости и размерах отдельных боковых ветвей пластины 2 щупа 1 могут отклоняться от первоначального положения и перемещаться по горизонтали одна относительно другой благодаря сферическому шарниру 4 и возвращаться в исходное положение осредством пружины 8. Конструкция щупа в предлагаемом устройстве позволяет осуществлять его контактирование с саженцем без повреждения кроны или стволика, исключить прием ложных сигналов о местонахождении выращиваемого растения, источником которого может окаааться постороннее растение в ряду, уничтойпть это растение в процессе движения агрегатаi обрабатывать саженцы с асимметрично развитой кроной.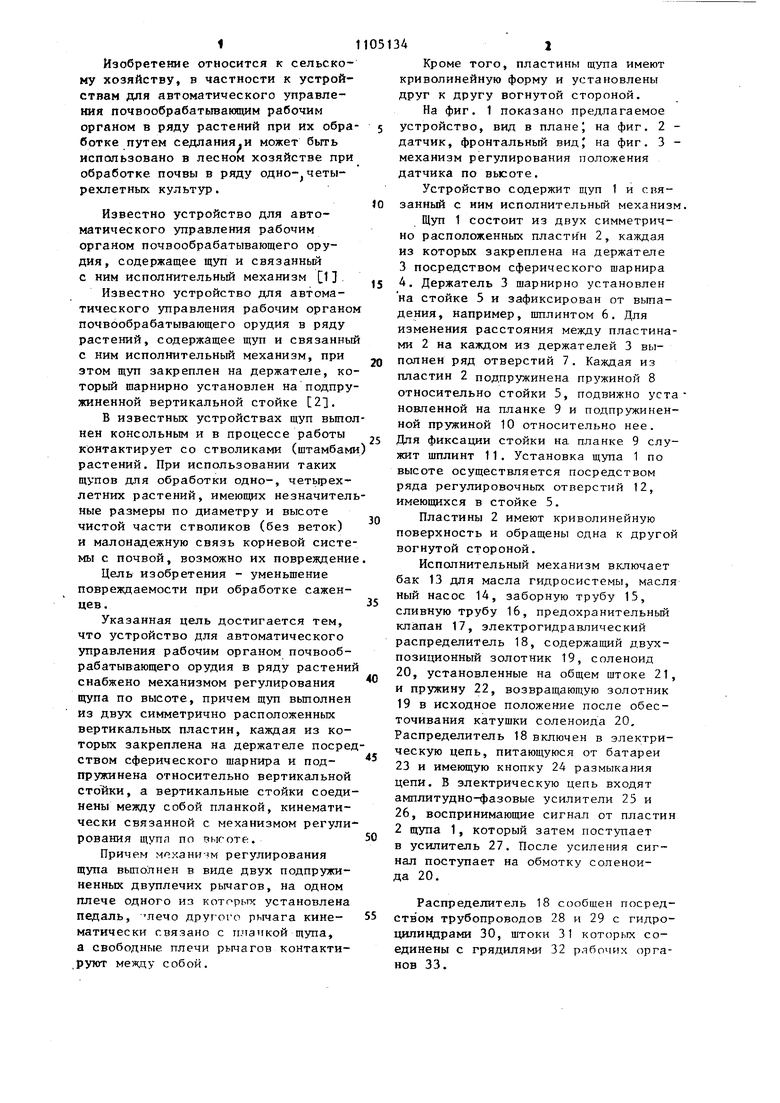
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления рабочим органом почвообрабатывающего орудия в ряду растений | 1984 |
|
SU1258346A2 |
| Устройство для автоматического управления движением рабочих органов почвообрабатывающей машины в ряду растений | 1990 |
|
SU1806504A1 |
| Культиватор-полольник | 1965 |
|
SU683656A1 |
| Способ возделывания лесных культур и устройство для его осуществления | 1981 |
|
SU1014501A1 |
| Машина для фрезерования пней | 1986 |
|
SU1414357A1 |
| Способ выращивания березы карельской из семян | 1986 |
|
SU1457859A1 |
| Почвообрабатывающий рабочий орган | 1986 |
|
SU1419537A1 |
| Способ посадки саженцев | 1986 |
|
SU1519588A1 |
| Каток для ухода за лесными культурами | 1980 |
|
SU967400A1 |
| Почвообрабатывающее орудие для пропашных культур | 1989 |
|
SU1665895A1 |
1. УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ В РЯДУ РАСТЕНИЙ, содержащее щуп и связанньй с ним исполнительный механизм, при этом щуп закреплен на держателе который шарнирно установлен на подпружиненной вертикальной стойке, отличающееся тем, что, с целью уменьшения повреждаемости саженцев при их обработке, оно снабжено механизмом регулирования щупа по высоте, причем щуп вьтолнен из двух симметрично расположенных вертикальных пластин, каждая из которых закреплена на держателе посредством сферического шарнира и подпружинена относительно вертикальной стойки, a вертикальные стойки соединены между собой планкой, кинематически связан ной с механизмом регулирования ntytta ло высоте. 2.Устройство поп.1,отли.чающееся тем, что механизм регулирования щупа по .высоте выполнен в виде двух подпружиненных двуплечих рычагов, на одном плече одного из которых установлена педаль, плечо другого рычага кинематически связано с планкой |цула, a свободные плечи рычагов контактируют меязду собой., 3.Устройство ПОП.1, отл и -. ч a ю ц е ее я тем, что пластины щупа имеют криволинейную форму и О установлены к другу вогнутой :л стороной.
/
Cpvs.f
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ю. Н. Писарев, И. В. Липтуга, Г. Г. Гогунский, Ю. С. Яновскийи В. А. Верди | 0 |
|
SU246946A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ВЫДВИЖНОЙ СЕКЦИИ ОРУДИЯ для ОБРАБОТК1 ПОЧВ В ПРИСТВОЛЬНОЙ ПОЛОСЕ САДА | 0 |
|
SU325914A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
