Изобретение относится к измерительной технике, а именно к области измерения угловых ускорений вращающихся деталей машин и механизмов Известен датчик углЬвых ускорений, содержащий статор с двумя обмотками, оси которых сдвинуты по от ношению друг к другу на 90 эл.град. одна из которых, расположенная по продольной оси датчика, является обмоткой возбуждения, питаемой постоянным током, а с другой - сигналь ной, расположенной по поперечной оси датчика, - осуществляется съем сигнала, зависящего от ускорения вращения ротора, которьй выполнен и немагнитного металла в виде полого цилиндра. Недостатки этого датчика - сниже ние чувствительности из-за повышенного активного сопротивления ротора, что требует применения усилителя на его выходе, отсутствие регу лировки чувствительности датчика в зависимости от диапазона скоростей и .наличие размагничивания поля рото ра с возрастанием скорости, что при водит к увеличению амплитудной погрешности . Наиболее близким по технической сущности к предлагаемому является электромеханический датчик параметров вращения, содержащий статор и ротор с двумя взаимно перпендикуляр ными обмотками на каждом, причем обмотки ротора замкнуты на активные сопротивления. Одна обмотка статора подключена к источнику постоянного .тока, а с другой, сигнальной, обмот ки снимается выходное напряжение СП, t2 и L3J. Однако в указанном устройстйе коэффициент пропорциональности меад измеряемым угловым ускорением вала и выходным напряжением существенно зависит от величины угловой скорост вала, что приводит к большой погреш ности в измерении углового ускорения, осуществляемого в диапазоне уг ловых скоростей. Целью изобретения является повьш ние точности измерения угловых уско рений и расширение диапазона угловы скоростей, сопутствующих ускорениям Указанная цель достигается тем, что в электромашинном датчике угловых ускорений, содержащем статор с обмоткой возбуждения, расположенной на продольной оси датчика, и сигнал 9 ной обмоткой, а также ротор с двумя взаимно перпендикулярными обмотками, замкнутыми на активные сопротивления, сигнальная обмотка статора смещена относительно поперечной оси датчика на угол описываемый соотношением (с..Ч..2 с(. arct -J т - П1 R максимальная угловая скорость вращения ротора L - индуктивность роторной обмотки, - суммарное активное сопротивление по контуру роторной обмотки. На чертеже представлена электрическая схема электромашинного датчика угловых ускорений. Датчик содержит статор 1, на котором размещены сигнальная обмотка 2, расположенная под углом Ч к поперечной оси датчика, и обмотка возбуждения 3-, а также ротор 4 с двумя взаимно перпендикулярными обмотками 5 и 6, замкнутыми на активные сопротивления 7. Датчик работает следующим образом. Вал ротора Д датчика соединяется с валом исследуемого объекта, обмотка возбуждения 3 запитывается постоянным током. При вращении ротора с угловой скоростью Ю обмотки 5 и 6 ротора пересекают поток, создаваемый обмоткой возбуждения, в результате чего на этих обмотках индуцируется ЭДС, вызывающая в цепях обмоток ротора токи, зависящие от активнозг.о сопротивления в контуре роторной обмотки и ее индуктивности. В свою очередь, токи в роторных обмотках создают поток, пронизывающий сигнальную обмотку 2 статора,причем поток этот при ускоренном вращении oTOpa оказъшается переменньм, в связи с чем при ускоренном вращении ротора на измерительной обмотке навоится ЭДС, пропорциональная измеряемому ускорению. ЭДС Е выходной обмотки определяется выражением , - постоянная датчика, В - коэффициент нелинейности.
Е - измеряемое угловое ускорение ,
Коэффициент нелинейности зависит от угла смещения сигнальной обмотки статора от поперечной оси датчика -V . угловой скорости вращения ротора -ujy индуктивности обмоток ротора -L, и суммарного активного спротивления по контуру роторной обМотки R в соответствии с выражением
.2
Б co5 otcos(/-2ot) ,
где
aC oirct uj- .
Анализ выражения для коэффициента нелинейности показывает, что при отсутствии смещения сигнальной обмотки от измерительной оси коэффициент нелинейности монотонно снижается от максимального значения при нулевой угловой скорости к минимальному значению на верхней границе рабочего диапазона угловых скоростей при этом разница в значениях коэффициента нелинейности на границах диапазона угловых скоростей оказывается значительной.
Смещение сигнальной обмотки на угол Ч снижает коэффициент нелинейности на нижней границе диапазона угловых скоростей и увеличивает его на верхней границе, уменьшая
таким образом .разницу между минимальным и максимальным значениями этого коэффициента в рабочем диапазоне угловых скоростей.
Оптимальное значение угла tf с точки зрения уменьшения нелинейности в диапазоне угловых скоростей определяется равенством коэффициента нелинейности на границах диапазона. Для случая, когда нижне границей рабочего диапазона является нулевая угловая скорость, оптимальный угол смещения сигнальной обмотки Чорт соответствует выражению
o(rct j-5-7- -т;-,«
опт
co5V Sin2ct
и
где
oL zrtrc-ti uj
m д
Таким образом, смещение сигнальной обмотки датчика угловых ускорений относительно поперечной оси датчика на оптимальный угол позволяет уменьпмть нелинейность, повышая тем самым точность преобразования, а при конкретном допустимом значении нелинейности - расширить рабочий диапазон угловых скоростей.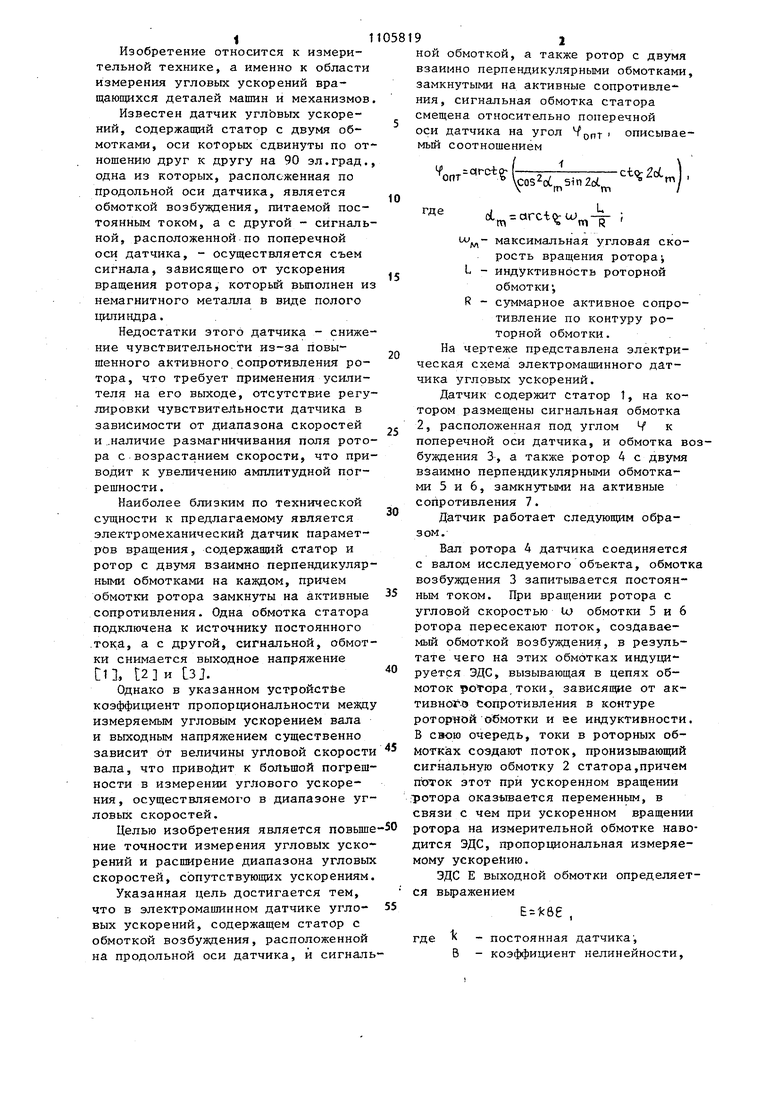
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения индуктивных и актив-НыХ СОпРОТиВлЕНий элЕКТРичЕСКОй МАшиНы | 1979 |
|
SU834818A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Электромашинный импульсный генератор | 1979 |
|
SU873340A1 |
| Способ определения индуктивного сопротивления рассеяния обмотки статора синхронной машины | 1990 |
|
SU1810849A1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| Электромашинный кольцевой датчик угла | 1989 |
|
SU1742948A1 |
| Двигатель поперечного поля | 1980 |
|
SU868939A1 |
| Способ измерения индуктивности рассеяния обмотки статора синхронной машины | 1985 |
|
SU1330591A1 |
| Синхронный импульсный генератор | 1981 |
|
SU982155A1 |
ЭЛЕКТРОМА ииННЫЙ ДАТЧИК УГЛОВЬК УСКОРЕНИЙ, содержащий статоо с обмоткой возбуждения, оасположенной на ппопольной оси датчика. и сигнальной обмоткой, а также ротор с двумя взаимно перпендикулярными обмотками, замкнутыми на активные сопротивления, о т л и ч а ющ и и с я тем, что, с целью повышения ТОЧНОСТИ и расширения диапазона угловых скоростей, сопутствующих ускорениям, сигнальная -обмотка статора смещена относительно поперечной оси датчика на угол f опт описываемьй соотношением . 1 V- - UsVsi.i М лЛ где ()- ; максимальная угловая ско§ рость вращения ротора; (Л L индуктивность роторной обМОТКИ: R суммарное активное сопротивление по контуру роторной обмотки. сл 00 со
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Лопухина Е.М | |||
| и др | |||
| Асин | |||
| хронные микромашины с полым ротором, М., Энергия, 1967, с | |||
| Катодный усилитель с промежуточными контурами и батарейным коммутатором для цепей сетки | 1923 |
|
SU404A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Асинхронньй тахометр как датчик угловых ускорений | |||
| Автоматика и телемеханика, т | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
