Изобретение относится к измерительной технике, а именно к электромашинным кольцевым датчикам угла, выходное напряжение которых служит мерой угла поворота ротора.
Известен линейный вращающийся трансформатор (Л ВТ), содержащий две взаимно перпендикулярные обмотки на статоре и две - на роторе, распределенные по синусоидальному закону. Расширение линейного диапазона обеспечивается после- дователь ным соединением первичной (статора) и вторичной (ротора) обмоток Л ВТ. Применяют ЛВТ с первичным или вторичным симметрированием обмоток. Выходное напряжение такого ЛВТ измеряется по закону
VBb, (С),
где К - коэффициент пропорциональности; V - напряжение источника питания; f(a ) - функция выходного напряжения,
f(a)
sin a
1 + m cos а
(1)
где а - угол поворота ротора; m - коэффициент, зависящий от параметров обмоток.
Функция ЛВТ с точностью до 0,060% совпадает с линейной функцией в диапазоне измерения углаа ± 60°, если m 0,536. Следовательно, для ЛВТ необходимо выбирать СКВТ с коэффициентом трансформации 0,536.
Существенным недостатком ЛВТ является большое число обмоток и наличие скользящих электрических контактов, через которые обмотки ротора соединяются с внешней неподвижной частью электрической цепи. Наличие скользящих контактов снижает надежность и срок службы, а также увеличивает стоимость ЛВТ, так как они изготавливаются из сплавов, содержащих драгоценные металлы.
-,-.%
&
Наиболее близким по технической сущности и достигаемому результату к предлагаемому техническому решению является бесконтактный индукционный синусный датчик с тремя синусоидально расположенными обмотками, две из которых взаимно перпендикулярно размещены на статоре, а обмотка ротора замкнута накоротко.
Если полные сопротивления обмоток статора одинаковы (условия симметрии), то при подключении одной из обмоток статора к источнику переменного напряжения, выходное напряжение перпендикулярно ей обмотки статора будет изменяться по закону синуса двойного угла поворота ротора, т.е.
f( a) a
(2)
Недостатком известного датчика является существенное отклонение синусоидальной зависимости от линейного закона, которая в середине диапазона а. ± 30° составляет 7,0%.
Целью изобретения является повышение линейности функции выходного напряжения в заданном диапазоне углов поворота ротора.
Указанная цель достигается тем, что в электромашинном кольцевом датчике угла, содержащем статор с взаимноперпендику- лярными обмотками возбуждения и выходной ротор с короткозамкнутой обмоткой, в цепи обмоток статора и ротора последовательно включены дополнительные реактивные сопротивления.
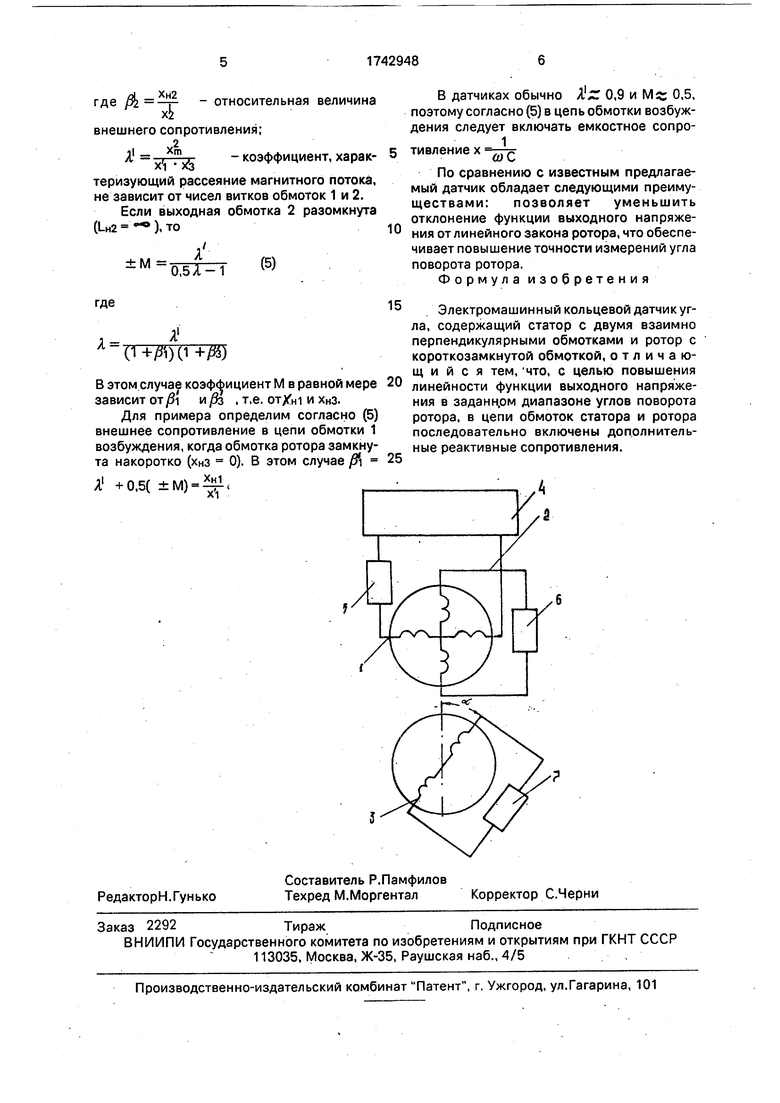
На чертеже изображена схема датчика угла, содержащего три синусоидально распределенные обмотки.
Две из обмоток 1 и 2 взаимно перпендикулярно размещены на статоре, а обмотка ротора 3 замкнута.
Однако из обмоток 1 статора подключена к источнику 4 переменного напряжения, а вторая 2 является выходной обмоткой. В цепи обмоток статора и ротора последовательно включены реактивные сопротивления 5-7.
Датчик работает следующим образом.
При подключении обмотки возбуждения к источнику переменного напряжения в датчике возникает пульсирующее магнитное поле.
Если ось замкнутой обмотки ротора 3 перпендикулярна или совпадает с осью обмотки 1 возбуждения, то отсутствует поперечная составляющая магнитного поля, создающая ЭДС в выходной обмотке 2 и
VeblX 0.
Если в датчике нагружена симметрия первичных обмоток, т.е. полное сопротивление цепей обмоток 1 и 2 неодинаково, то синусоидальная функция (2) искажается ре- акцией обмотки ротора 3.
Тогда функция выходного напряжения обмотки 2 будет равна
10
ffa)sin 2 a
1 м -cos 2 a
Здесь для М знак (-) для углов поворота ротора a 0- 45°, а знак (+) для углов а а ±. 90°
Знаки (+) и (-) перед М показывают, что подбором параметров обмоток можно обеспечить отрицательное и положительное значения коэффициента М. Это расширяет функциональные возможности устройства.
Например, при М 0,5 функция (3) имеет в 26 раз меньше отклонение от линейного закона, чей синусная функция (2) в диапазоне углов Ј+ 30°.
При питании от источника с частотой
400 Гц и выше индуктивные сопротивления обмоток на несколько порядков выше активных и последними можно пренебрегать.
Значение коэффициента М, оптимальное для выбранного диапазона углов а ,
связано с параметрами цепей обмоток датчика зависимостью
М
35
Х1 Хт23 - Х2 Хт13 Х1 -Xm23tX-Xm1,3 - 2 Х1 Х2 4 ХЗ
где хт - сопротивление взаимной индукции обмоток 1 и 2 статора и ротора 3;
xi, X2, хз полное реактивное сопротив- ление обмоток;
х1 - собственное сопротивление обмотки; х х1 + хн;
хн - внешнее сопротивление.
Коэффициент М зависит от хн и чисел витков обмотки.
При симметрии первичных обмоток 1 и 2 числитель 1 (М 0) и
f(« ) sin la,
Если в обмотках 1 возбуждения и ротора 3 нет внешних сопротивлений, т.е. хН1 ХнЗ 0 и обмотки статора идентичны xi Х2 то
±М Х
&
(1 +$)(2+$
(4)
Т шнего сопротивления;
А
- относительная величина
Хт
- коэффициент, харак- 5 тивление хВ датчиках о поэтому согласн дения следует в 1
x i хз
изующий рассеяние магнитного потока, зависит от чисел витков обмоток 1 и 2.
Если выходная обмотка 2 разомкнута °), то
10
По сравнени мый датчик обла ществами: п отклонение фун ния от линейного чивает повышен поворота ротора
±М
0,5А-1
(5)
где
А
А1
()(i+)
В этом случае коэффициент М в равной мере зависит и /fo , т.е. от/Н1 и хнз.
Для примера определим согласно (5) внешнее сопротивление в цепи обмотки 1 возбуждения, когда обмотка ротора замкнута накоротко (хнз 0). В этом случае /ft
Хн1
хГ
А + 0,5( ±М)
тивление хВ датчиках обычно 0,9 и Ms: 0,5, поэтому согласно (5) в цепь обмотки возбуждения следует включать емкостное сопро- 1
По сравнению с известным предлагаемый датчик обладает следующими преимуществами: позволяет уменьшить отклонение функции выходного напряжения от линейного закона ротора, что обеспечивает повышение точности измерений угла поворота ротора.
Формула изобретения
Электромашинный кольцевой датчик угла, содержащий статор с двумя взаимно перпендикулярными обмотками и ротор с короткозамкыутой обмоткой, отличающийся тем, что, с целью повышения линейности функции выходного напряжения в заданном диапазоне углов поворота ротора, в цепи обмоток статора и ротора последовательно включены дополнительные реактивные сопротивления.

| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный линейный вращающийся трансформатор | 1981 |
|
SU982156A1 |
| ЛИНЕЙНЫЙ ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР | 1965 |
|
SU223176A1 |
| ЛИНЕЙНЫЙ ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР | 1971 |
|
SU317092A1 |
| Способ измерения угла поворота | 1970 |
|
SU376024A1 |
| ЭЛЕКТРОМАШИННЫЙ ИМПУЛЬСНЫЙ ФАЗОВРАЩАТЕЛЬ | 2019 |
|
RU2720352C1 |
| Индукционный электромашинный многополюсный двухфазный фазовращатель | 1987 |
|
SU1495942A1 |
| Электромашинный датчик угловых ускорений | 1982 |
|
SU1105819A1 |
| Линейный вращающийся трансформатор | 1976 |
|
SU660073A1 |
| Способ управления вентильным электродвигателем | 1989 |
|
SU1690160A1 |
| Бесконтактный преобразователь угла поворота с сосредоточенными обмотками | 1985 |
|
SU1328887A1 |
Использование: изобретение относится к измерительной технике .электромашинным кольцевым датчикам угла. Сущность изобретения: электромашинный кольцевой датчик угла содержит статор с взаимно перпендикулярными обмотками (возбуждения и выходной) и ротор с короткозамкнутой обмоткой. В цепи обмоток статора и ротора последовательно включены дополнительные реактивные сопротивления. 1 ил.
| Хрущев В.В | |||
| Электрииеские машины автоматических устройств | |||
| - Л.: Энергия, 1976, с | |||
| Ножевой прибор к валичной кардочесальной машине | 1923 |
|
SU256A1 |
| Баканов М.В., Лыска В.А., Алексеев В.В.Информационные микромашины следящих и счетно-решающих систем | |||
| - М.: Советское радио, 1977. | |||
