Изобретение относится к технической кибернетике и может быть использовано в системах регулирования объе тами с запаздыванием по состоянию, причем параметры объекта - неизвестные постоянные или медленно меняющие ся во времени величины. Такими систе мами являются, например, системы ав Томатического управления летательным аппаратами, ядерными реакторами, гид ромелиоративньп4И сооружениями и т.д. Известно устройство для автомати;Ческого управления объектами при нал чии случайных возмущений, содержащее задающее устройство, узел сравнения, объект регулирования, блок коммутируемых коэффициентов, сумматор, дифференцирующее звено, блок умножения, квадратор, блок выделения знака, выход задающего устройства связан с входом узла сравнения, второй вход которого соединен с выходом объекта регулирования, вход которого подключен к выходу блока коммутируемых коэффициентов, один вход которого связан с выходом узла сравнения, а другой вход соединен с выходом сумма тора, один вход которого подключен к выходу дифференцирующего звена а другой вход связан с выходом блока умножения, один вход которого соединен с выходом квадратора, а второй вход подключен к выходу блока вьщеле ния знака, выход узла сравнения связан с входом дифференцирующего звена входом квадратора, входом блока выделения знака 13Недостатками данного устройства являются малая точность в работе, ог раниченные функциональные возможное ти, так как устройство может работат только с объектами, порядок которых не превышает второго, и не может работать с объектами, обладающими запаздыванием. Наиболее близким техническим решением к предлагаемому является само настраивающаяся система управления, содержащая блок задания коэффициентов, последовательно соединенные бло суммирования, первый умножитель, интегратор, второй умножитель, объект регулирования, выходы которого соединены с соответствующими входами блока задания коэффициентов,входы блока суммирования подключены к соот ветствующим выходам блока задания ко эффициентор, выход блокасуммнрования подключен ко вторым входам первого и второго умножителей 2 . Недостатком этом системы являются узкие функциональные возможности, так как система не может работать с объектами, обладающими запаздыванием. Цель изобретения - расишрение функциональных возможностей системы. Поставленная цель достигается тем, что в систему, содержащую первый блок задания коэффициентов, последовательно соединенные первый блок суммирования, первый умножитель, первый интегратор, второй умножитель, выходы объекта регулирования соединены с соответствуницими входами первого блока задания коэффициентов, входы первого блока суммирования подключены к соответствующим выходам первого блока задания коэффициентов, выход первого блока суммирования подключен ко вторым входам первого и второго умножителей, дополнительно введены блок запаздывания, второй блок задания коэффидаентов, последовательно соединенные второй блок суммирования, третий умножитель, -второй интегратор, четвертый умножитель, третий блок суммирования, выходы объекта регулирования соединены с соответствующими входами блока запаздывания, выходы которого .связаны с соответствующими входами второго блока задания коэффи-. циентов, соединенного выходами с соответствующими входами второго блока суммирования, выход которого подключен ко второму входу четвертого умножителя, выход первого блока суммирования соединен с вторьм входом третьего умножителя, второй вход и выход третьего блока суммирования подключен соответственно к выходу второго умножителя и входу объекта регулирования. Вводя в систему блок запаздьшания, второй блок задания коэффициентов, второй блок суммирования, третий умножитель, второй интегратор, четвертьй умножитель, третий блок суммирования, получают в системе новую функцию, которая заключается в том, что теперь управляющее воздействие формируется не только на основе информации о состоянии объекта в данный момент времени, но и на основе информации о состоянии объекта, полученной ранее на время, равное 1 ремени запаздывания, что является необходимым условием при управлении объектами, обладающими запаздыванием. На чертеже представлена блок-схема предлагаемой системы. Система содержит объект регулирования 1, первый блок 2 задания коэффи Щ1ентов, блок 3 запаздьшания, второй блок 4 задания коэффициентов, первый блок 5 суммирования, первый умножитель 6, первый интегратор 7, второй умножитель 8, второй блок 9 суммирований, третий блок 10 суммирования, второй интегратор 11, четвертый умножитель 12, третий блок 13 суммирования . Выходы объекта регулирования 1 связаны с соответствующими входами первого блока 2 задания коэффициентов и соответствующими входами блока 3 запаздывания, выходы первого блока 2 задания коэффициентов подключены к соответствующим входам первого блока 5 суммирования, выход которого .соединен с первым и вторым входом первого умнржителя 6, входом второго умножителя 8, входом третьего умножителя 10, выход первого умножителя 6 связан с входом первого интегратора 7, выход которого подключен ко второму входу второго умножителя 8, выходы блока 3 запаздывания соединены с соответствующими входами второго блока 4 задания коэффициентов, выходы которого « связаны с соответствующими входами второго блока 9 суммирования, выход которого подключен ко второму входу третьего умножителя 10 ик входу четвертого умножителя 12, выход третьего умножителя 10 соединен с входо второго интегратора 11, выход которо го связан с вторым входом четвертого умножителя 12, выход которого подклю чен ко входу третьего блока 13 сумми рования, второй вход которого связан с выходом второго умножителя 8, а вы ход подключен ко входу объекта регу лирования 1. Система функционирует следующим образом. Сигналы с выходов объекта регулирования 1 поступают одновременно на соответствуюире входы первого блока 2. задания коэффициентов и блока 3 запаздьюания. Блок 2 задания коэффициентов представляет собой блок умно жителей, в этом блоке происходит ум ножение сигнала с выхода объекта регулирования 1 на постоянный коэффициент . Сигналы с выходов блока 2 задания коэффициентов поступают на соответствующие входы первого блока 5 суммирования, гле складываются. Сигнал с выхода блока 5 суммирования приходит на вход второго умножителя 8, на вход третьего умножителя 10 и на оба входа первого умножителя 6. В первом умножителе 6 происходит умножение сигнала с выхода первого блока 5 суммирования на этот же сигнал. Сигнал с выхода умножителя 6 поступает на вход первого интегратора 7, где интегрируется, ас выхода интегратора 7 - на второй вход вто рого умножителя 8. Во втором умножителе 8 происходит умножение сигнала с выхода интегратора 7 на сигнал с выхода первого блока 5 суммирования. Сигналы с выходов блока 3 запаздывания через время, равное времени запаздывания, поступают на соответотвукмдие входы второго блока 4 задания коэффициентов, где происходит умножение сигнала с -го выхода блока 3 запаздывания на постоянный коэффициент. Сигналы с выходов второго блока 4 задания коэффициентов поступают на соответствующие входы второго блока 9 суммирования, где складываются. Сигнал с выхода второго блока 9 суммирования поступает на вход четвертого умножителя 12 и на вход третьего ; умножителя 10. В третьем умножителе 10 происходит умножение сигнала с вьрсода первого блока 5 суммирования на сигнал с выхода второго блока 9 суммирования. Сигнал с выхода третьего умножителя поступает на вход второго интегратора 11, где интегрируется. Сигнал с выхода второго интегратора 11 поступает на второй вход четвертого умножителя 12, где происходит умножение сигнала с выхода второго интегратора 11 на сигнал с выхода второго блока суммирования. Сигнал с выхода четвертого умножителя 12 поступает на второй вход третьего блока 13 суммирования, где складывается с сигналом, поступающим на первый вход блока 13 суммирования с выхода второго умножителя 8. Сигнал с выхода третьего блока 13 суммирования, являющийся сигналом управления, nocTynaet на вход объекта регулирования 1. Предлагаемая система обладает более широкими функциональными возможностями, так как может работать и с объектами, обладающими запаздыванием.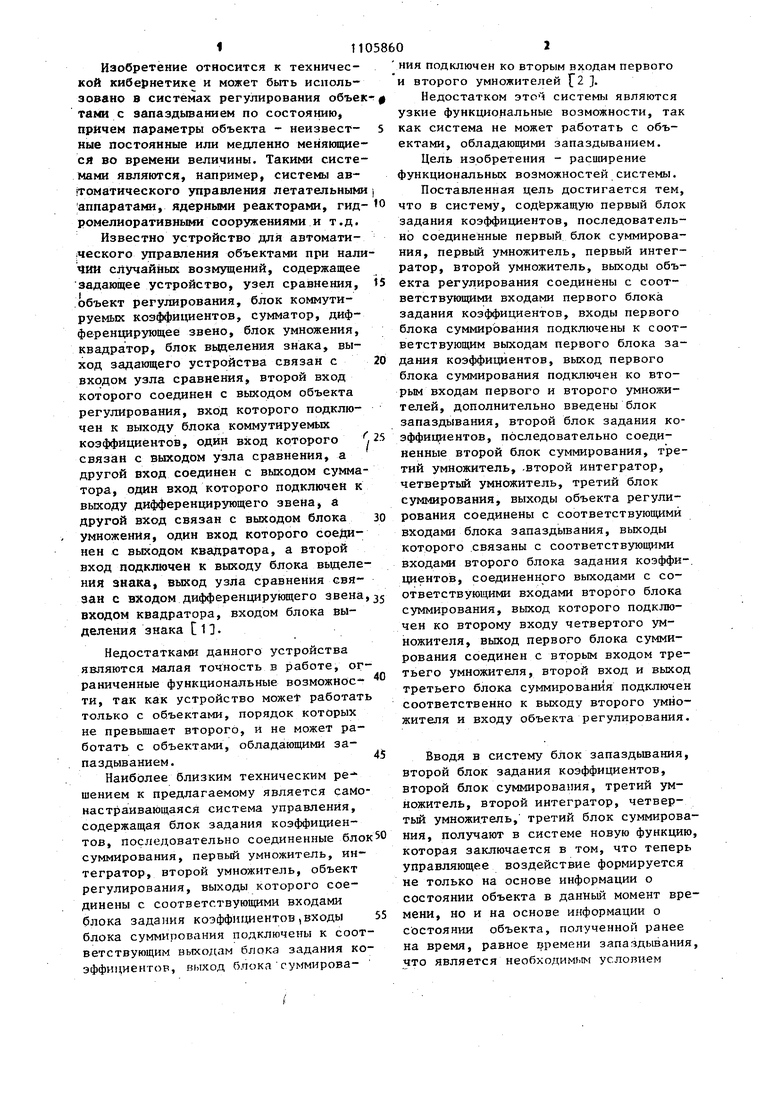

СА 10НАСТРАИВАЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая первый блок задания коэффициентов, последовательно соединенные первый блок суммирования, первый умножитель, первый интегг ратор, второй умножитель, выходы объекта регулирования соединены с соответствующими входами первого блока задания коэффи1 1иентов, входы первого блока суммирования соединены с соответствующими выходами первого блока задания коэффициентов, выход первого блока суммирования подключен ко вторым входам первого и второго умножителей, отличающаяся тем, что, с целью расширения функциональных возможностей системы, в нее введены блок запаздьшания, второй блок задания коэффициентов,последовательно соединенные второй блок суммирования, третий умножитель, второй интегратор, четвертый умножитель, третий блок суммирования, выходы объекта регулирования соединены с соответствующими входами блока запаздывания, выходы которого подключены к соответствуюпдам входам второго блока задания коэффициентов, соединенного выходами с соответkn с ствующими входами второго блока сумми рования, выход которого подключен ко второму входу четвертого умножителя, выход первого блока суймирования соединен с вторым входом третьего умножителя, второй вход и выход третьего блока суммирования подключены соответ ственно к выходу второго умножителя и входу объекта регулирования. сд 00 0 о
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ ПРИ НАЛИЧИИ СЛУЧАЙНЫХ ВОЗМУЩЕНИЙ | 0 |
|
SU378803A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3398459/24,кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
