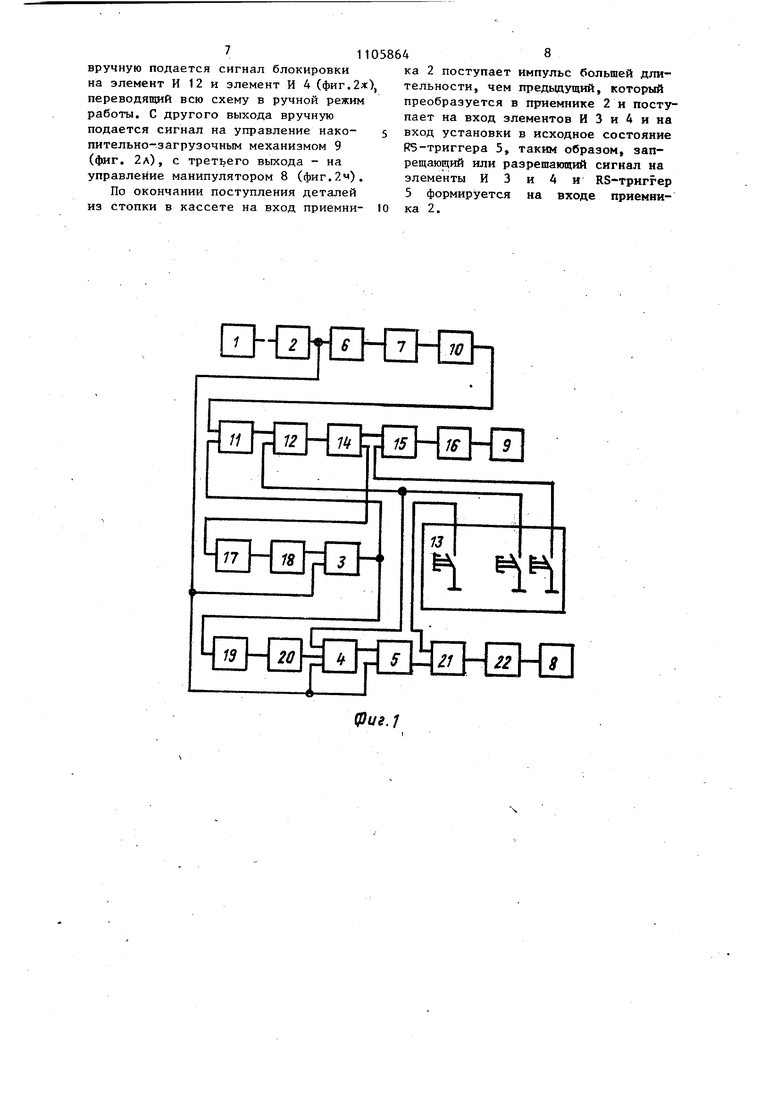
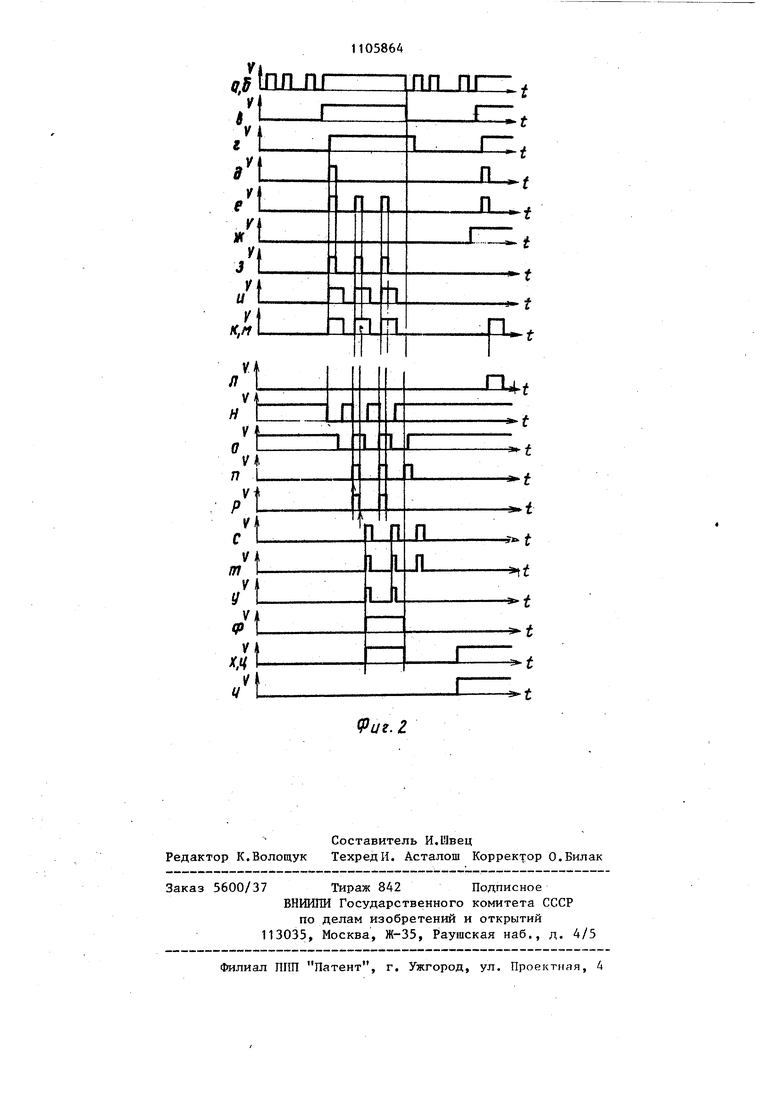
Изобретение относится к автоматизации в машиностроении и может быть использовано во всех отраслях народного хозяйства, где необходима автоматизация процесса поштучной выдачи и транспортировки изделийi Известно устройство для включения исполнительного механизма, содержащее тиристор, анод которого через последовательно соединенные обмотку исполнительного механизма и управляемый контакт соединен с первым выводом источника питания, катод тирис тора подключен ко второму вьюоду источника питания и через параллельно соединенные первый конденсатор и пер вую обмотку импульсного трансформатора к управляющему электроду тиристора, контактные датчики положения и соответствующие каждому контактно му датчику положения резистор, второй конденсатор, первьш и второй вып рямители, причем в нем первый вывод каждого .контактного датчика поло ения соединен с первым вьгоодом источника питания, второй вывод каждого контактного датчика положения через соответствующие последовательно соединенные второй конденсатор и первый выпрямитель подключен к первому выводу второй обмотки импульсного трансформатора, второй вывод которой соединен с катодом тиристора и через соответствующий резистор с вторым вьгоодом каждого контактного датчика положения, а третий вывод второй обмотки импульсного трансформатора через соответствующий второй выпрямитель, к каждой общей точке соединения второго конденсатора и первого выпрямителя 1 . Однако данное устройство имеет узкую область применения, низкую надежность, кроме того, оно может управлять только одним механизмом ввиду наличия контактных датчиков и одного органа управления. Известно также устройство дпя управления подачей деталей из вибробункера, содержащее фотоэлектрические датчики, подключенные ко входам первого и второго усилителей, выходы которых подсоединены ко входам элемента ИЛИ, выход которого соедине с входом триггера Шмитта, один из выходов которого подключен ко входу выходного усилителя, в цепь нагрузки которого включено реле. Другой выход триггера 11 митта соединен с другим входом первого усилителя 2 J. В этом устройстве используются два фотоэлектрических датчика, что снижает надежность системы управле- . ния, а также устройство работает в импульсном режиме, так как испытывает кратковременные включения и выключения при закрытом одном фотоэлектрическом датчике и кратковременном перекрытии другого, что не всегда допускает его применение для управления другими исполнительными механизмами. В устройстве также не предусмотрено управление транспортным механизмом в комплексе с вибробункером. Кроме того, импульсньй режим работы устройства увеличивает расход электроэнергии при работе вибробункера. Все это сужает .область его применения. Цель изобретения - повышение надежности и расширение функциональных возможностей управления при автоматизации процесса поштучной выдачи и транспортировки изделий. Поставленная цель достигается тем, что устройство для автоматизации управления подачей изделий заг- рузочным и транспортным механизмами, содержащее датчик наличия детали в кассете, первый элемент ИЛИ, первый формирователь импульсов, первый ключевой элемент, связанный выходом с манипулятором, введен R5-триггер, второй элемент ИЛИ, блок задания разрешающих потенциалов и последовательно соединенные частотньш компаратор, элемент задержки и первый формирователь импульсов и последовательно соединенные первый элемент И, одновибратор, третий элемент ИЛИ и второй ключевой элемент, а также последовательно соединенные второй элемент задержки, второй формирователь импульсов, второй элемент И и третий элемент задержки, подключенньй выходом через первый формирователь импульсов к первому входу третьего элемента И, второй вход которого соединен с выходом датчика наличия деталей в кассете и с К-входом Р5-триггера, подключенного 5-входомк выходу третьего элемента И, а выходом - к первому входу второго элемента ИЛИ, второй вход которого соединен с первым выходом блока задания разрешающих потенциалов, третий вход третьего элемента И подключен ко второму выходу блока задания разрешающих потенциалов и к первому входу первого элемента И, второй вход второго элемента И соединен с выходом датчика наличия деталей в кассете, а третий выход блока задания разрешающих Потенциалов подключен к второму входу третьего элемента ИЛИ, выход второго формирователя импульсо через первый элемент ИЛИ подключен ко второму входу первого элемента И, второй вход первого элемента ИЛИ сое динен с выходом второго элемента И. На фиг. 1 представлена блок-схема устройства для автоматического управ ления подачей изделий загрузочным и транспортным механизмами; на фиг,2 временные диаграммы работы устройства. Устройство содержит датчик наличи деталей в кассете 1, приемник 2, вто рой элемент И 3, третий элемент И 4, КЗ-триггер 5, частотный компаратор 6, элемент задержки 7, манипулятор 8, накопительно-загрузочный блок 9, формирователь импульса 10, элемент ИЛИ 11, первый элемент И 12, блок за дания разрешающих потенциалов 13, одновибратор 14, элемент ИЛИ 15, клю чевой элемент 16, элемент задержки 17, формирователь импульса 18, элемент задержки 19, формирователь им.пульса 20, элемент ИЛИ 21, ключевой элемент 22. На временной диаграмме обозначено 6(,6 - сигнал на входе приемника 2; в - сигнал на входе частотного компаратора 6-f 1 - сигнал на вь1ходе элемента задерл(ки 7-, в - сигнал на выходе формирователя импульса 10; 6 - сигнал на выходе элемента ИЛИ 11 ж - сигнал с первого выхода блока задания разрешающих потенциалов 13 3 - сигнал с выхода элемента И 12; и - сигнал с первого выхода одновиб- ратора 14J к- сигнал с выхода элемента ИЛИ 15i л - сигнал с второго выхода блока 13; м- сигнал с выхода ключевого элемента 16; н - сигнал с второго выхода одновибратора 14; о сигнал с выхода элемента задержки 17 п - сигнал с выхода формирователя им пульса 18; р - сигнал с выхода элемента ИЗ; с- сигнал с выхода элемента задержки 19; т - сигнал с выхода формирователя импульса 20 у сигнал с выхода элемента И 4 сигнал с выхода R5 -триггера 5л, х сигнал с выхода элемента ИЛИ 21; ц сигнал с выхода ключевого элемента 22; ч - сигнал с третьего выхода блока 13. В качестве датчиком могут быть использованы любые датчики с дискретным выходом (контактные, фотоэлектрические, индуктивные, емкостные и т.п.), предназначенные для контроля наличия деталей в стопке, находящейся в кассете загрузочно-накопительно- . го устройства. Используемые датчики расположены горизонтально в нижней части стопки. При взятии каждой очередной детали в нижней части стопки последняя перемещается на один шаг (высоту детали). В этих условиях эффективнее использовать фотоэлектрический датчик, который фиксирует отсутствие деталей в стопке и перемещение стопки. При этом длительность импульса определяется перемещением стопки деталей на один шаг. При отсутствии деталей в стопке получаем импульс большей длительности, определяемый временем поиска очередной кассеты с деталями накопительно-загрузочного устройства. Одновибратор 14 (может быть выполнен по любой схеме), принудительно (внешним воздействием) переведенный в состояние неустойчивого равновесия, после цикла возвращается в исходное состояние и остается в нем до тех пор, пока не будет осуществлен очередной внешний его запуск. Формирователи импульсов предназначены для формирования коротких импульсов по переднему фронту входного сигнала. Длительность их выходных сигналов предопределяется быстродействием срабатывания последующих элементов. Ключевые элементы 16 и 22 предназначены для согласования данного устройства с управляемыми объектами, могут использоваться усилители постоянного тока, реле и т.п. Работу устройства рассмотрим на конкретном примере управления накопительно-загрузочным механизмом (в частности, состоящим из вертикально расположенных кассет на поворотном столе, управляемом поворотно-делительным механизмом) и транспортным механизмом (в частности, манипулятором). При горизонтальном расположении датчика 1 с одной стороны детали и приемника 2 с другойее стороны, ре гистрирующих наличие деталей в стоп ке, находящейся в кассете на входе приемника 2, при выдаче детали из кассеты периодически появляется им пульс с определенной длительностью (фиг. 2а), который преобразуется в приемнике 2 в электронный импульс той же длительности (фиг. 26). Это происходит за счет инерционности и малых скоростей перемещений всей механической системы. По окончании поступления деталей из кассеты на вход датчика приемника 2 поступает импульс большей длительности (фиг. 2а), чем предыдущий который преобразуется в приемнике 2 (фиг. 2б), поступает на вход элементов И 3 и 4 и на вход установки в исходное состояние RS -триггера 5, переводя их в рабочее состояние. Одновременно импульс поступает в частотный компаратор 6, где он выде ляется (фиг. 2в) и поступает в элемент задержки 7, где происходит задержка сигнала (фиг. 2t) на время, за которое рука манипулятора 8 успе вает уйти из зоны накопительно-загрузочного устройства 9, после чего сигнал поступает в формирователь импульса 10, на выходе которого поя ляется импульс (фиг. 2в) и, пройдя элемент ИЛИ 11 (фиг. 26), поступает на вход элемента И 12. При отсутствии на входе блокирующего сигнала с блока 13 (фиг. 2ж) импульс поступае на вход одновибратора 14 (фиг. 2э) и запускает его. Одновибратор 14 вырабатывает им пульс определенной длительности. С первого выхода одновибратора 14 импульс (фиг. 2и), пройдя последовательно элемент ИЛИ 15 (фиг. 2к) при отсутствии блокирующего сигнала на втором входе элемента ИЛИ 15 с блок 13 (фиг. 2л) и ключевой элемент 16 (фиг. 2A), обеспечивает срабатывани поворотно-делительного механизма в накопительно-загрузочном механизме С второго выхода одновибратора 14 импульс (фиг. 2н), пройдя последова тельно элемент задержки 17 (фиг. 2о где происходит задержка импульса на время смены кассеты накопительно-за рузочного механизма 9, и формирователь импульсов 18 (фиг. 2п), поступ ет на второй вход элемента И 3 и, если в кассете не окажется заготовки, разрешающий сигнао. (сигнал большой длительности), поступающий на первый вход элемента И 3 (фиг. 25), разрешает прохождение импульса, поступающего на вход элемента И 3 (фиг. 2 р), с выхода которого он поступает на второй вход элемента РШИ 11. С выхода элемента ИЛИ 11 импульс (фиг.2е), проходя элемент И 12, поступает на вход одновибратора 14 (фиг. 2з), который выработает импульс (фиг. 2и) поступающий на элемент ИЛИ 15 (фиг. 2к)и ключевой элемент 16 (фиг. 2уи), подающий команду на очередное срабатывание поворотно-дели- ч тельного механизма в накопительнозагрузочном механизме 9, а со второго выхода одновибратора 14 импульс (фиг. 2н) поступает на вход элемента задержки 17. После- этого циклы повторяются до тех пор, пока не будет найдена кассета с деталями. Одновременно с подачей импульса на вход элемента ИЛИ 11 (фиг. 2р) импульс поступает на вход элемента задержки 19, в котором происходит задержка импульса (фиг. 2с) на время транспортировки детали манипулятором 8, и, если время поиска детали боль.ше времени транспортировки, сигнал с выхода элемента задержки 19 (фиг. 2е), пройдя последовательно формирователь импульсов 20 (фиг. 2т) и элемент И 4 (фиг. 2у) при отсутствии блокирующего сигнала с выхода блока 13 (фиг. 2), поступает на информационный вход RS -триггера 5. С его выхода сигнал (фиг, 2 Ф), пройдя последовательно элемент ИЖ 21 (фиг. 2х) и ключевой элемент 22 (фиг. 2ц), отключает манипулятор 8 и только когда будет найдена кассета с деталями ,первая из которых перекроет вход датчика - приемника 2, и на его выходе исчезнет импульс большей длительности (фиг. 2q), элементы И 3 и 4 блокируются, а с RS триггера стирается ранее записанная информация и включается манипулятор 8. Схема устройства подготовлена к повторению цикла. При необходимости вмешательства человека в процесс управления накопительно-загрузочным и транспортными механизмами предусмотрен блок 13, с выхода которого оператором вручную подается сигнал блокировки на элемент И 12 и элемент И 4 (фиг.2 переводящий всю схему в ручной режим работы. С другого выхода вручную подается сигнал на управление накопительно-загрузочным механизмом 9 (фиг. 2л), с третьего выхода - на управление манипулятором В (фиг,2ч). По окончании поступления деталей из стопки в кассете на вход приемни114 ка 2 поступает импульс большей длительности, чем предыдущий, который преобразуется в приемнике 2 и поступает на вход элементов И 3 и 4 и на вход установки в исходное состояние RS-триггера 5, таким образом, запрещающий или разрешающий сигнал на элементы И 3 и 4 и RS-триггер 5 формируется на входе приемника 2.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система для управления робототехнологическим комплексом | 1987 |
|
SU1413599A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| Устройство для ввода учебной информации | 1990 |
|
SU1732369A1 |
| Широтно-импульсный регулятор для управления вентильным преобразователем | 1983 |
|
SU1181074A1 |
| Устройство для формирования последовательности импульсов заданной длительности | 1977 |
|
SU769709A1 |
| Устройство для коррекции расхода вещества по температуре и давлению | 1981 |
|
SU1027702A1 |
| Устройство для измерения логарифмического декремента затухания механических колебаний | 1971 |
|
SU506767A1 |
| УСТРОЙСТВО ДЛЯ МАГНИТНО-ИМПУЛЬСНОЙ ОБРАБОТКИ РАСТЕНИЙ | 2002 |
|
RU2231949C1 |
| Устройство для считывания информации с колеса транспортного средства | 1986 |
|
SU1326492A1 |
| Аппарат для намотки магнитной ленты в кассету | 1980 |
|
SU878709A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОДАЧЕЙ ИЗДЕЛИЙ ЗАГРУЗОЧНЫМ И ТРАНСПОРТНЫМ МЕХАНИЗМАМИ, содержащее датчик наличия деталей в кассете, первый элемент ИЛИ, первый формирователь импульсов и первьй ключевой элемент, связанньй выходом с манипулятором, отличающееся тем, что, с целью повышения надежности устройства и расширения функциональных возможностей при автоматизации процесса поштучной выдачи изделий, в него введены R5-триггер, второй элемент ИЛИ, блок задания разрешающих потенциалов и после-довательно соединенные частотный компаратор, элемент задержки и первый формирователь импульсов, последовательно соединенные первьй элемент И, одновибратор, третий элемент ИЛИ, второй ключевой элемент, a также последовательно соединенные второй элемент задержки, второй формирователь импульсов, второй элемент И и третий элемент задержки, подключенный выходом через первый формирователь импульсов к первому входу третьего элемента И, второй вход которого соединен с выходом датчика наличия деталей в кассете и с R -входом Р5-триггера, подключенного S-входом к выходу третьего элемента И, a выходом - к первому входу второго элемента ИЛИ, второй вход которого г соединен с первым выходом блока задания разрешаю1цих потенциалов, третий вход третьего элемента И подключен ко второму выходу блока задания разрешакицих потенциалов и к перg вому входу первого элемента И, второй вход второго элемента И соединен с выходом датчика наличия деталей в кассете, a третий выход блока задания разрешающих потенциалов подключен ко второму входу третьего :л элемента ИЛИ, выход второго формиро00 вателя импульсов через первый элемент ИЛИ подключен к второму входу первого элемента И, второй вход первого элемента ИЛИ соединен с выходом второго элемента И.
фиг.1
Риг.г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для включения исполнительного механизма | 1975 |
|
SU586449A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления подачей деталей из вибробункера | 1975 |
|
SU525937A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
