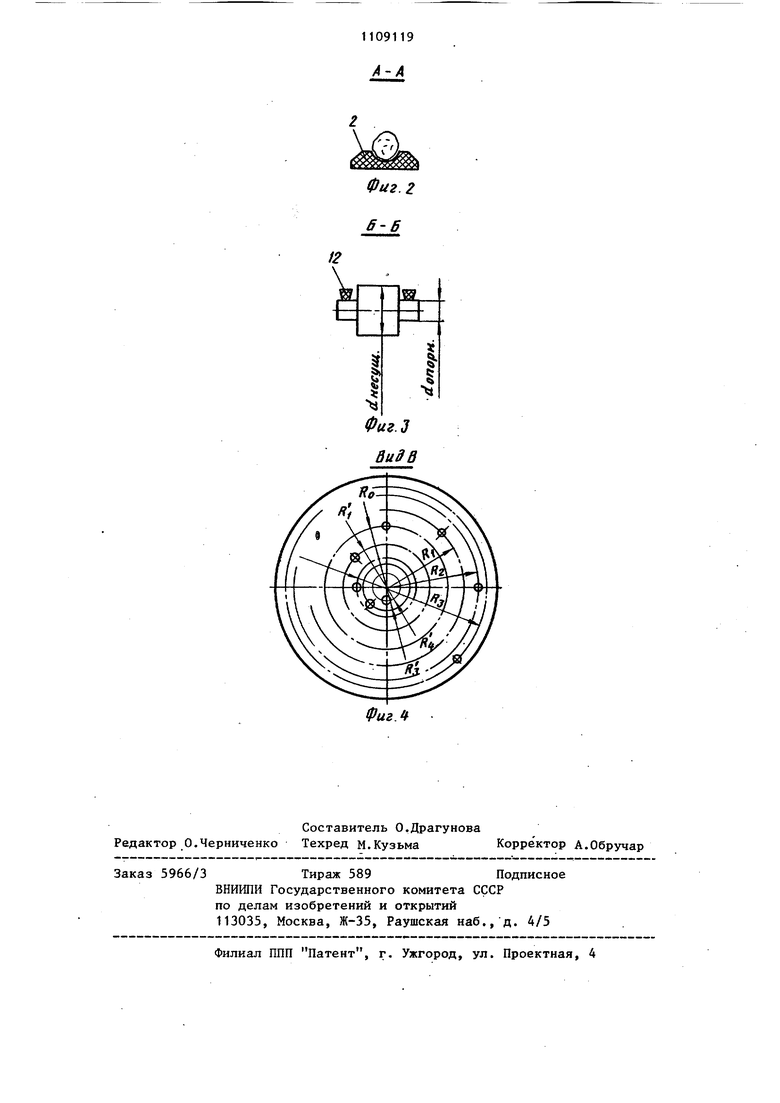
Изобретение относится к сельском хозяйству и может быть использовано при сортировке плодов по качеству автоматическими устройствами, работающими по принципу поэлементного осмотра всей поверхности каждого пл да, например клубня картофеля. Известны устройства автоматическ сортирования плодов, основанные на оптическом принципе разделения разнокомпонентной массы, например камней и клубней картофеля( 1 . Наиболее близкой к изобретению по технической сущности и достигаем му результату является машина для автоматической сортировки плодов по качеству, содержащая механизм поштучной подачи плодов, роликовый транспортер с неподвижными планками для привода роликов, монтированные над ним источники света, сканирующее оптическое распознающее приспособление, состоящее из диска с отверстиями, расположенными по спир ли, и фотоприемника и исполнительны механизм 2. Однако для того, чтобы просмотре весь клубень на используемом в устройстве роликовом транспортере, он должен линейно переместить клубень большое расстояние, так как вращен клубней осуществляется путем Переме щения поверхности роликов по направл щим, поэтому размер зоны контроля бу дет равен длине окружности сечения наибольшего плода. Большая зона ко роля не позволяет иметь большую прои водительность, так как она определяет количество клубней на единицу длины транспортера а скорость подачи клубней по роликовому транспортеру о раничена до 1 м/с. Следовательно, в связи с необходимостью просмотреть весь клубень необходима большая зона контроля, а для высокой производител ности - малая. В силу кривизны плодов сканируемые изображения их оптически искажаются: одинаковые по размерам дефекты на краях плодов при сканировании кажутся меньшими, чем в центре, что снижает точность контроля. Кроме того, при сходе клубней с поверхностей отдельных узлов устройства наблюдается большой разброс траекторий движения клубней что ухудшает равномерность поштучной подачи и точность работы исполнитель ного механизма и приводит к просыпанию клубней. Целью изобретения является повышение надежности машины в работе и .ее производительности. Эта цель достигается тем, что в машине для автоматической сортировки плодов по качеству, содержащей механизм поштучной подачи плодов, роликовый транспортер с неподвижными планками для привода роликов, смонтированные над ним источники света, сканирующее оптическое распознающее приспособление, состоящее из диска с отверстиями, расположенными по спирали, и фотоприемника, и исполнительньй механизм, отверстия на диске расположены так, что радиальное расстояние между ними уменьшается от середины диска к центру и периферии, диаметр ролика на концах меньше, чем в середине, причем с концевыми участками этих роликов взаимодействуют неподвижные планки. На фиг.1 изображено предлагаемое устройство, общий вид на фиг.2 разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - вид В на фиг.1. Машина для автоматической сортировки плодов по качеству содержит механизм поштучной подачи плодов, состоящий из желобчатого конвейера 1 и скатного лотка 2, ниже скатного лотка расположен роликовый транспортер 3, на сходе которого установлены направляющий лоток 4 и наполнительньй механизм 5. Над роликовым транспорт Тером размещена оптико-измерительная система 6, состоящая из источников 7 излучения и фотоприемника 8. Между фотоприемником и роликовым транспортером расположен сканирующий диск 9. За исполнительным механизмом установлены транспортеры для здоровых 10 и больных 11 клубней соответственно. Над верхним рядом роликов роликового транспортера установлена неподвижная планка 12. Диаметр каждого ролика на концах меньше, чем в середине, при этом концевые участки взаимодействуют с планкой оси сканирующего диска, которая не совпадает с главной оптической осью, являющейся одновременно оптической осью фотоприемника, и смещена от нее приблизительно на половину радиуса диска. Отверстия на диске расположены так, что радиальное расстояние между ними уменьшается от середины диска к центру и периферии. Скатный 2 и направляющий 4 лотки выполнены с профилем сечений, близким к форме плода (фиг.2). Машина работает следующим образом Плоды подаются на выстраивающую желобчатую поверхность подающего конвейера 1, те из них, что заняли наиболее устойчивое положение в желобе транспортируются вверх, ос.таль ные, не попавшие в основной ряд, по мере подъема скатываются вниз. Этому способствует установка конвейе ра под углом 10-40° к горизонту и профиль желоба, близкий к форме плода (овальный). Плоды в основном ряду размещаются по одному один за другим и по лотку 2 скатьгоаются на роликовый транспортер 3. Скорост транспортера в 1,5-3 раза выше, чем скорость конвейера, что обеспечивает распределение плодов из плотног потока на конвейере в поток со значительными интервалами на транспортере .(плоды размещаются в пазах между роликами). На участке, приблизительно соста ляющем 2/3 длины верхней ветви роли кового транспортера, где над роликам установлена неподвижная планка 12 (фиг.З показаны две), при поступательном перемещении роликов они одн временно вращаются и обеспечивают вращение плодов в сторону их постулательного движения. Интенсивность вращения роликов и плодов тем вьше, чем больше отношение радиуса несущей поверхности ролика к радиусу опорной (оптимальное значение этого отношения 1,5-2,5). В зоне контроля, находящейся при близительно в середине участка вращ ния и не превьшающей по размеру расстояние между центрами роликов, происходит осмотр плода сканирующим оптическим распознающим приспособл пием, включающим фотоприемник 8 и сканирующий диск 9. Вследствие умен шающегося при удалении от оптической оси расстояния (по радиусу диска) между отверстиями на диске осмотр при входе плода в зону контроля наиболее труднодоступных его участков (вблизи пересечения диаметральной плоскости п.пода и его оси, параллельной его поступательной скорости) осуществляется более часто с большим перекрытием, чем при осмотре последующих центральных участков. То же перекрытие при осмотре обеспечиваегся на выходе плода из зоны. В связи с этим повышается вероятность обнаружения загнивших плодов, имеющих дефекты, и на труднодоступных для осмотра участках. Заданное направление вращения плодов также повышает вероятность обнаружения дефектов, но наиболее важным является то, что такое вращение плодов в сторону из поступательного движения позволяет уменьшить необходимый угол поворота в 1,5-2 раза и зону контроля от 2,5-3 до одного межцентрового расстояния между роликами по сравнению с известным устройством. Осмотренные плоды далее по транспортеру поступают к направляющему лотку 4 и исполнительному механизму 5; Работ эй исполнительного механизма, включающего, например, соле-ноид и магнитный сердечник с прикрепленным к нему штоком-выталкивателем, управляет сигнал от оптического сканирующего распознающего приспособления. На пути от фотоприемника до исполнительного механизма оптический сигнал, полученньм в результате осмотра поверхности плода, с помощью специальных преобразователей преобразуется в электрический, который передается на исполнительный механизм. В зависимости от качества плода (знака и величины сигнала) шток исполнительного механизма либо остается неподвижным например для здоровых плодов, либо выталкивается, передавая ударный импульс плоду (например, больному). Траектории движения плодов получаются разными и транспортеры собирают отдельно здоровые и больные плоды. А-А
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортировки плодов | 1989 |
|
SU1717083A1 |
| Способ автоматического контроля степени повреждения клубней картофеля | 1981 |
|
SU987518A1 |
| Устройство для сортировки плодов | 1985 |
|
SU1324632A1 |
| Сортирующее устройство | 1979 |
|
SU847979A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ И СОРТИРОВКИ КОРНЕКЛУБНЕПЛОДОВ И ФРУКТОВ | 2001 |
|
RU2194380C2 |
| Способ оптической сортировки плодов по качеству | 1979 |
|
SU820038A1 |
| Установка для сортировки корнеклубнеплодов | 1989 |
|
SU1666421A1 |
| Линия для послеуборочного сортирования клубней картофеля, корней и плодов овощей | 2019 |
|
RU2711780C1 |
| Способ сортировки корнеклубнеплодов | 1982 |
|
SU1389881A1 |
| Оптико-электронное устройство для отделения некондиционных корнеклубнеплодов, камней и комков почвы в потоке | 1980 |
|
SU880313A1 |
МАШИНА ДЛЯ АВТОМАТИЧЕСКОЙ СОРТИРОВКИ ПЛОДОВ ПО КАЧЕСТВУ, содержащая механизм поштучной подачи плодов, роликовый транспортер с неподвижными планками для привода роликов, смонтированные над ним источники света, сканирующее оптическое распознающее приспособление, состоящее из диска с отверстиями, расположенными по спирали, и фотоприемни/ка, и ИСПОЛНИТЕЛЬНЫЙ механизм, о тличающаяся тем, что, с целью повышения ее надежности в работе и производительности отверстия на диске расположены так, что радиальное расстояние между ними уменьшается от серидины диска к центру и периферии, диаметр ролика на концах меньше, чем в середине, причем с концевыми участками этих роликов взаимо(Л действуют неподвижные планки. :о Ф
Фиг. 2 6-Б
Фиг.З ВидВ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ визуализации импульсных СВЧ-полей | 1988 |
|
SU1583877A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Научный труд МИИСП, т.ХУ1, вып | |||
| Насос | 1917 |
|
SU13A1 |
| М., 1979, с.5-9. | |||
