.
Изобретение относится к области сельского хозяйства, а точнее к решению задач сортирования плодов по качеству, и может быть использовано в технологических процессах послеуборочной, предпосадочной и товарной подготовки корнеклубнеплодов
Цель изобретения - увеличение точности распознавания корнеклубнепло- дов.
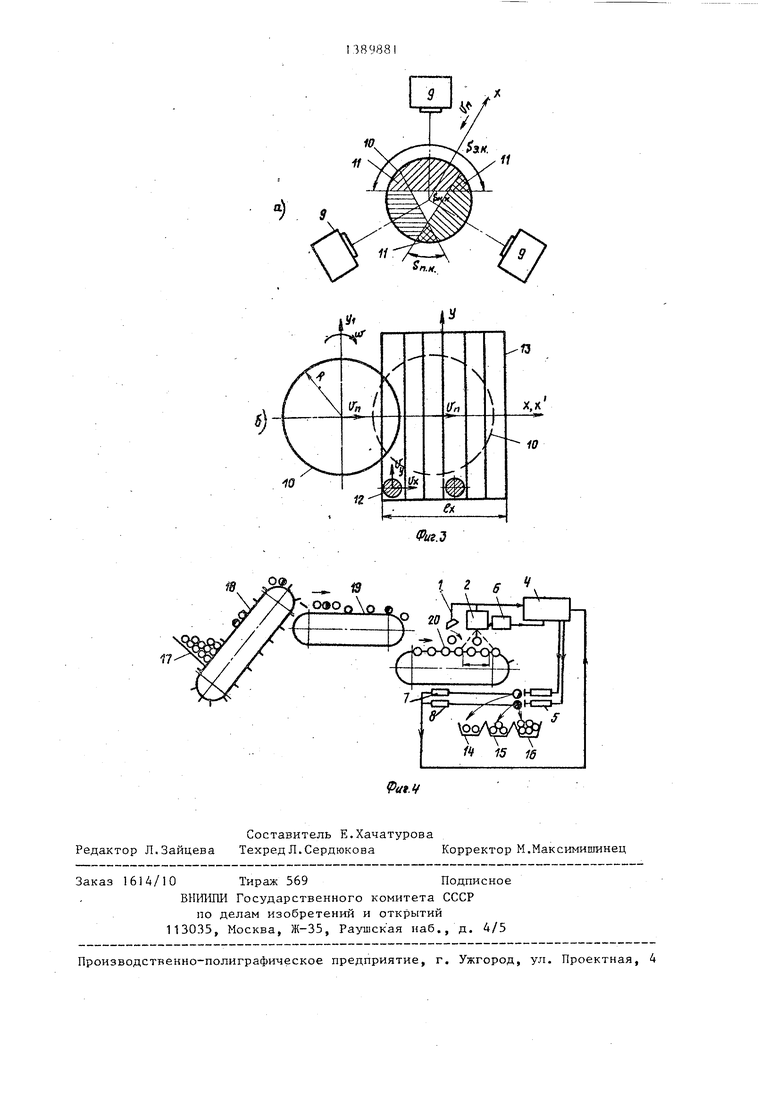
На фиг.1 приведены среднестатисти ческие характеристики спектрального отражения контролируемых объектов; на фиг.2 - структурно-функциональ- пая схема устройства, реализующего способ .; на фиг.З - схема реализации последовательно-параллельного сканирования; на фиг о 4 - схема осзт1еств- ления способа в конкретном устройст- ве.
На фиг.1 обозначены: К - характеристика спектрального коэффициента отражения для качественных пло- , дов; К - для загнивших плодов, К,- для камней, комков почвы
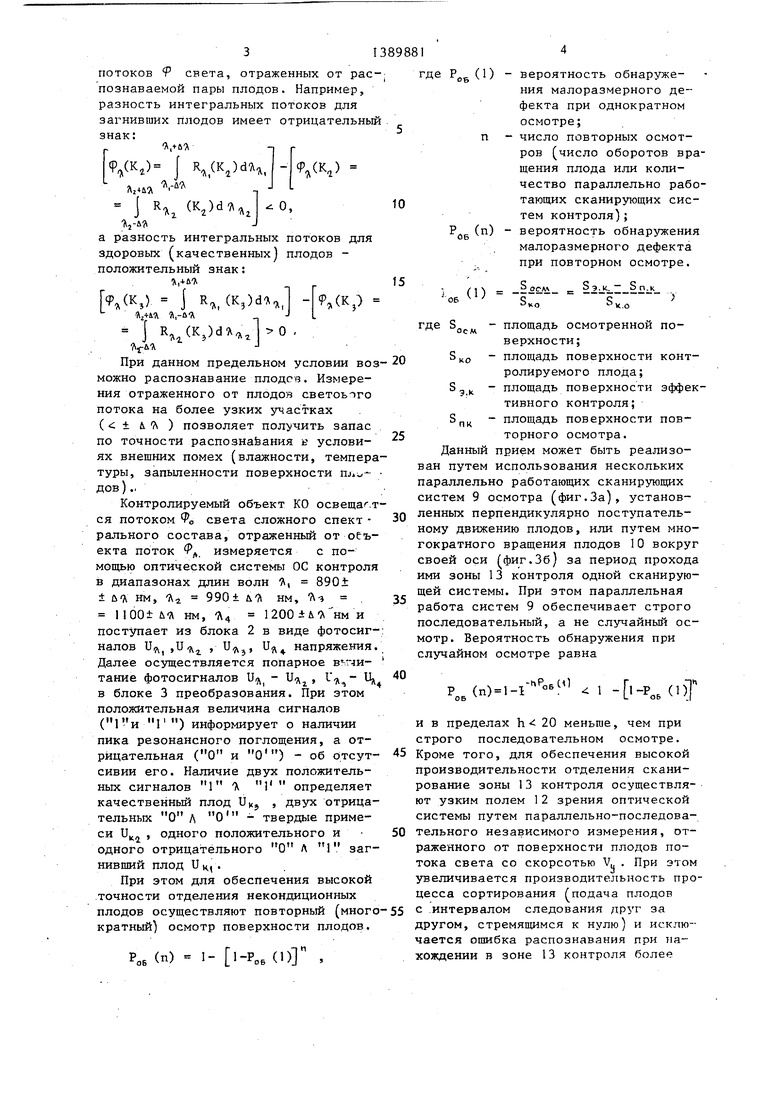
Устройство (фиг.2) содержит блок освещения контролируемого объекта, блок 2 измерения отраженного потока света, блок 3 преобразования измеренного потока в электрический сигнал, блок 4 распознавания фотосигналов, блок 5 исполнительных механизмов, блок 6 синхронизации распознавания с поштучным осмотром и блоки 8 и 7 синхронизации подачи команды на отделение плодов с их движением в рабочей зоне исполнительного механизма. На фиг.2 обозначены; КО - контро лируемьй объект; ОС - оптическая система;- PQ - поток освещения; Ф, - отраженный поток света; U - напряжение фотосигнала, измеренного в полосе 890 нм; Uo, - напряжение фото jl о.
сигнала, измеренного в полосе 990 нм и напряжение фотосигнала, измеренного в полосе 1100 нм; напряжение фотосигнала, измеренного в полосе 1200 нм. 1 и - сигналы с положительной разницей фотосигналов
« О -Фо- товигналы с отрицательной разницей
Л 9 Л символ логической операции БЛР - блок логического распознавания; ИМ1, ЙМ2 - ис йолнительные механизмы; U, , U,, , UK, - сигналы распознавания классов K,,Kjj Kj. ,
5
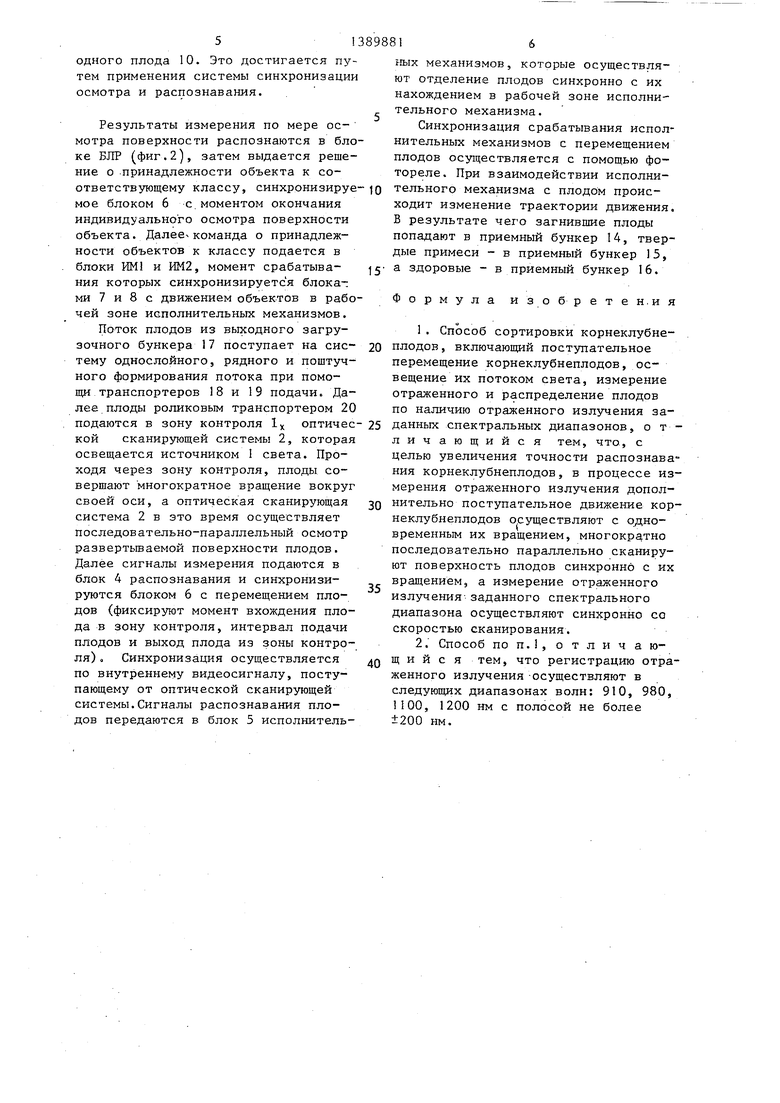
На схеме (фиг.З) обозначены: оптические сканирующие системы 9 осмотра поверхности плодов, контролируемый плод 10, зоны П повторного осмотра, поле 12 зрения сканирующей системы осмотра, зона 13 контроля.
1 и 1у - длина и ширина зоны
Q
-. 0
5
5
.
0
5
0
0
контроля, v 1 Vy - скорости перемещения сканирующего поля зрения в направлении оси X и Y, V, - скорость поступательного движения контролируемого плода, R - радиус контролируемого плода.
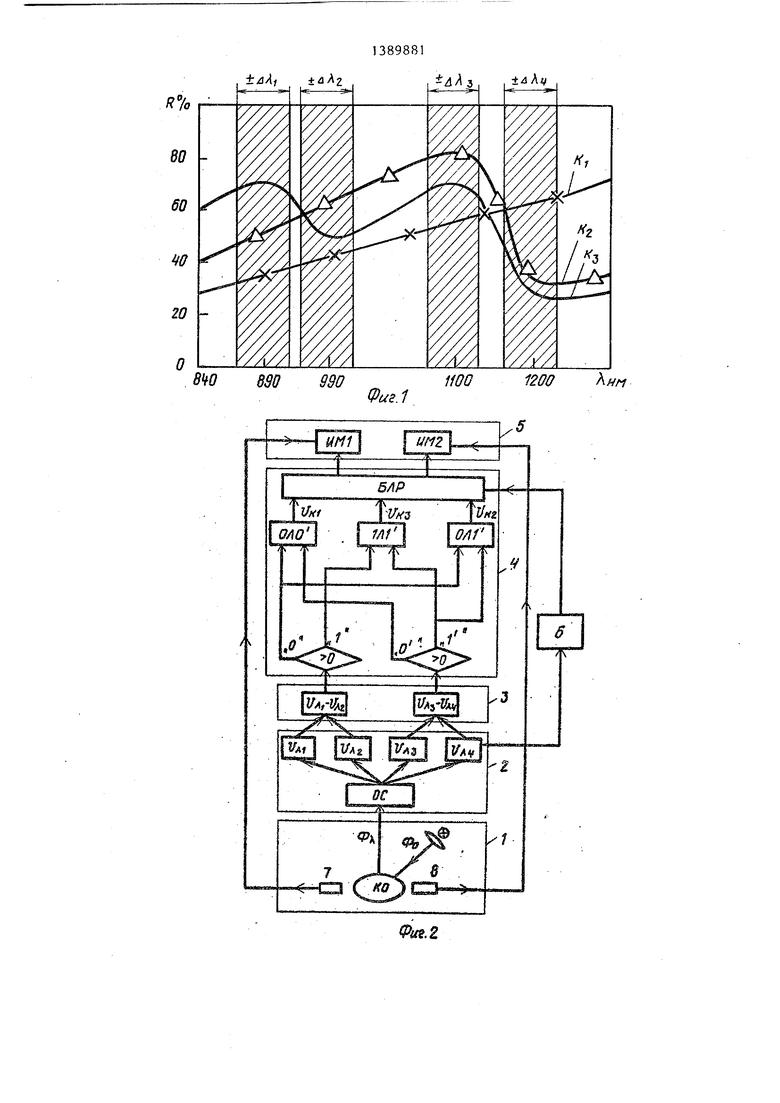
На фиг.4 обозначены: приемный бункер 14 для загнивших плодов; приемный бункер 15 для твердых примесей, приемный бункер 16 для качественных плодов., входной загрузочный бункер 17, транспортер 18 подачи, транспортер 19 по штучной подачи плодов; роликовый транспортер 20.
Принцип распознавания твердых примесей, загнивших и качественных плодов, основан на измерениях отраженного потока на характерных участках спектра (экстремальные точки характеристики качественных плодов Л, 890 нм, 990 нм, -Д j 1100 нм, Л4 1200 нм}. Положение этих точек определено пиками интенсивного поглощения света.
Как видно из графика (фиг.1) у качественных плодов имеется два пика поглощения - нм и Л 1200 нм; у загнивших плодов только один пик 4 1200 нм, у твердых примесей не имеется ни одного. Пики резонансного поглощения возникают в .результате совпадения частот собственного колебания.атомарно-молекулярной структуры плодов и частоты (длины ВОЛНЫ ) колебаний света. При этом диапазон спектра в выбранных точках не должен прёвьшзать ±200 нм, так как результаты измерения перекрываются при большей полосе и характерные точки кривой спектрограммы не распознаются.
Измерение отраженного от плода светового потока на узких участках спектра позволяет более точно.установить качественное состояние контролируемого объекта и опознавание загнивших, загрязненных качественных плодов и твердые примеси. При этом ширину (iuTi) полосы спектральных 5 астков выбирают в пределах знакопеременной разности интегральных
потоков f света, отраженных от распознаваемой пары плодов. Например, разность интегральных потоков для загнивших плодов имеет отрицательный знак:
,
р г
V.) J .,(K,)ci4 - Р.СК,)
. J I J R-x (Кг)й I -о, ;KJ-& J
а разность интегральных потоков для здоровых (качественных) плодов
положительный знак: л.
,) J R,, (K,)d,l - V A J L
J R (K,)d, 0.
При данном предельном условии воз можно распознавание плодов. Измерения отраженного от плодов светоьпго потока на более узких згчастках ( ± А ) позволяет получить запас по точности распознаЬания в услови- ях внешних помех (влажности, температуры, запыленности поверхности ш дов).,
Контролируемый объект КО освеща .т ся потоком света сложного спект рального состава, отраженный от оеъ- екта поток у. измеряется с помощью оптической системы ОС контроля в диапазонах длин волн , 890± ± й А нм, -Л 990± л Л нм, Лч . llOOib-A нм, 1200±Л Л нми поступает из блока 2 в виде фотосиг
налов и,Д| ,V 1, , Uj напряжения. Далее осуществляется попарное такие фотосигналов и,д - И-д , I -A,- Иц в блоке 3 преобразования. При этом положительная величина сигналов ( ) информирует о наличии пика резонансного поглощения, а отрицательная (О и О) - об отсут- сивии его. Наличие двух положитель- ньпс сигналов 1 Х определяет качественный плод , двух отрицательных О Л О - твердые приме
одного положительного и
О
Г
заготрицательногоплод U|,.
этом для обеспечения высокой и отделения некондиционных
плодов осуществляют повторный (много-55 интервалом следования друг за кратный) осмотр поверхности плодов.
другом, стремящимся к нулю) и иск чается ошибка распознавания при хождении в зоне 13 контроля боле
РОВ (п) - - I-POB (1)
где (1) - вероятность обнаружения малоразмерного дефекта при однократном осмотре;
п - число повторных осмотров (число оборотов вращения плода или количество параллельно работающих сканирующих систем контроля); вероятность обнаружения малоразмерного дефекта при повторном осмотре.
РОВ ()
06
(1)
. 2iKi.
V t
0
0
5
где S
ОСМ
9Ж
площадь осмотренной поверхности;
площадь поверхности контролируемого плода; площадь поверхности эффективного контроля; 5 - площадь поверхности повторного осмотра.
Данный прием может быть реализован путем использования нескольких параллельно работающих сканирующих систем 9 осмотра (фиг.За), установленных перпендикулярно поступательному движению плодов, или путем многократного вращения плодов 10 вокруг своей оси (фиг.Зб) за период прохода ими зоны 13 контроля одной сканирующей системы. При этом параллельная работа систем 9 обеспечивает строго последовательный, а не случайный осмотр. Вероятность обнаружения при случайном осмотре равна
40
Р„(п)
1 - «-РовСпТ
и в пределах h-i 20 меньше, чем при строго последовательном осмотре.
Кроме того, для обеспечения высокой производительности отделения сканирование зоны 13 контроля осуществляют узким полем 12 зрения оптической системы путем параллельно-последовательного независимого измерения, отраженного от поверхности плодов потока света со скорсотью V . При этом увеличивается производительность процесса сортирования (подача плодов
интервалом следования друг за
другом, стремящимся к нулю) и исключается ошибка распознавания при нахождении в зоне 13 контроля более
51389881
одного плода 10. Это достигается путем применения системы синхронизации осмотра и распознавания.
tfb ю н т
Результаты измерения по мере ос- мотра поверхности распознаются в блоке БЛР (фиг.2), затем выдается решение о .принадлежности объекта к соответствующему классу, синхронизируемое блоком 6 с. моментом окончания индивидуального осмотра поверхности объекта. Дaлee команда о принадлежности объектов к классу подается в блоки ИМ и ИМ2, момент срабатывания которых синхронизируетс я блоками 7 и 8 с движением объектов в рабочей зоне исполнительных механизмов.
Поток плодов из выходного загрузочного бункера 17 поступает на систему однослойного, рядного и поштучного формирования потока при помощи транспортеров 18 и 19 подачи. Далее плоды роликовым транспортером 20 подаются в зону контроля ,( оптичес кой сканирующей системы 2, которая освещается источником 1 света. Проходя через зону контроля, плоды совершают многократное вращение вокруг своей оси, а оптическая сканирующая система 2 в это время осуществляет последовательно-параллельный осмотр развертьшаемой поверхности плодов. Далее сигналы измерения подаются в блок 4 распознавания и синхронизируются блоком 6 с перемещением плодов (фиксируют момент вхождения плода в зону контроля, интервал подачи плодов и выход плода из зоны контроля) , Синхронизация осуществляется по внутреннему видеосигналу, поступающему от оптической сканирующей системы.Сигналы распознавания плодов передаются в блок 5 исполнитель
tfbix механизмов, которые осуществляют отделение плодов синхронно с их нахождением в рабочей зоне исполнительного механизма.
Синхронизация срабатывания исполнительных механизмов с перемещением плодов осу1цествляется с помощью фотореле. При взаимодействии исполнительного механизма с плодом происходит изменение траектории движения, В результате чего загнившие плоды попадают в приемный бункер 14, твердые примеси - в приемный бункер 15, а здоровые - в приемный бункер 16.
Формула из обретен.ия
1 . Способ сортировки корнеклубнеплодов , включающий поступательное перемещение корнеклубнеплодов, освещение их потоком света, измерение отраженного и распределение плодов по наличию отраженного излучения заданных спектральных диапазонов, о т - личающийся тем, что, с целью увеличения точности распознавания корнеклубнеплодов, в процессе измерения отраженного излучения дополнительно поступательное движение корнеклубнеплодов осуществляют с одновременным их вращением, многократно последовательно параллельно сканируют поверхность плодов синхронно с их вращением, а измерение отраженного излучения-заданного спектрального диапазона осуществляют синхронно со скоростью сканирования.
2. Способ поп.,отличаю- щ и и с я тем, что регистрацию отраженного излучения -осуществляют в следующих диапазонах волн: 910, 980, 1100, 1200 нм с полосой не более ±200 нм.
-)
0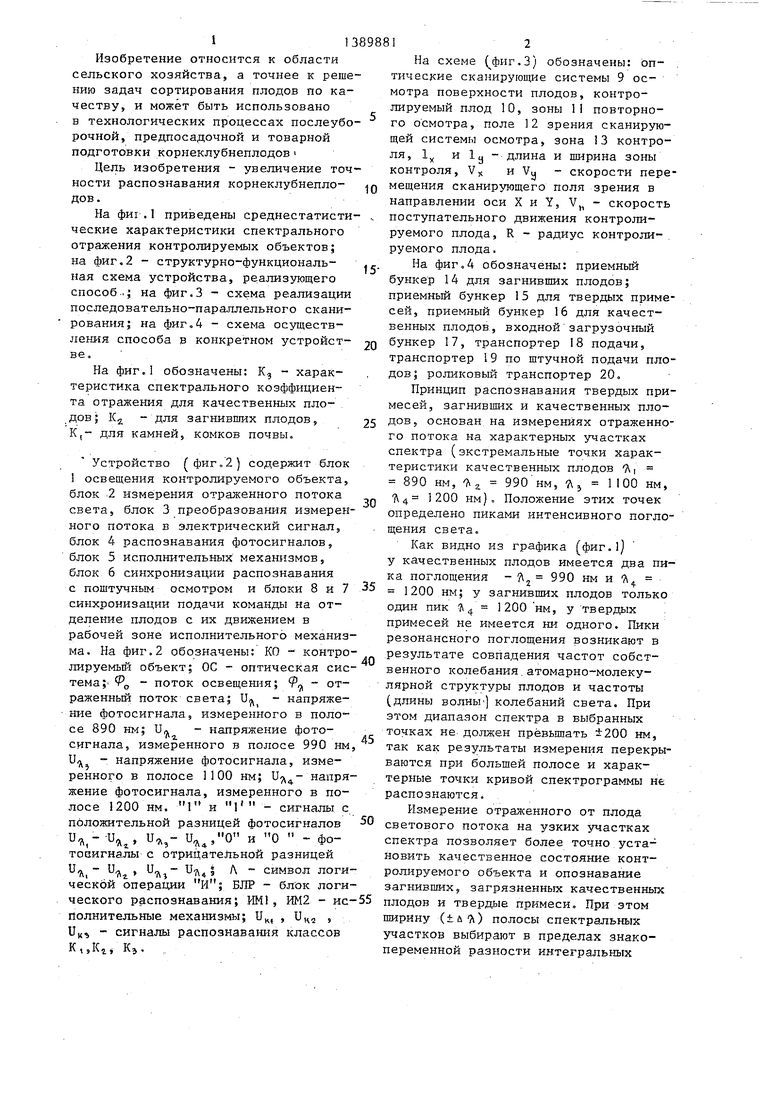
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оптической сортировки плодов по качеству | 1979 |
|
SU820038A1 |
| Способ оптической сортировки корнеклубнеплодов по качеству | 1983 |
|
SU1147453A1 |
| Устройство для сортирования корнеклубнеплодов | 1986 |
|
SU1634246A1 |
| Способ распознавания початков кукурузы | 1982 |
|
SU1099880A1 |
| Линия с оптической системой идентификации макро- и микроповреждений тканей корнеклубнеплодов и яблок | 2022 |
|
RU2780053C1 |
| Способ оптической сортировки плодов | 1982 |
|
SU1024126A1 |
| Устройство для оптической сортировки плодов | 1987 |
|
SU1496839A1 |
| Способ автоматического управления процессом сортирования клубней картофеля, корней и плодов овощей | 2020 |
|
RU2751604C1 |
| Машина для автоматической сортировки плодов по качеству | 1981 |
|
SU1109119A1 |
| Оптико-электронное устройство для отделения некондиционных корнеклубнеплодов, камней и комков почвы в потоке | 1980 |
|
SU880313A1 |
Изобретение относится к области сельского хозяйства, может быть использовано в технологических процессах послеуборочной, предпосадоч-ной и товарной подготовки корнеклубнеплодов и позволяет увеличить точность распознавания корнеклубнеплодов . Способ заключается в том, что измерение отраженного от контролируемого потока осуществляется на участках, положение и птрина которых определяется характерными точками резонансных пиков поглощения света на длинах волн 7, 890 нм, 7 990 нм, -Л, 1100 нм, 7 1200 нм с полосой спектра не более ±50 нм, распознавание сигналов осуществляется синхронно с осмотром до момента полного опознавания, а работа исполнительного механизма синхронизирована с движением объектов. 1 з.п. ф-лы, 4 ил. 
| .Патент США № 3678769, кл | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
