Изобретение относится к области оптической локации, точнее к системам оптического поиска, обнаружения и распознавания типа обнаруженной цели с использованием телевизионных методов обработки сигналов и может быть использовано для создания систем охранной сигнализации, работающих в условиях помех, с обеспечением сигнализации, характер которой в значительной степени уменьшает вероятность пропуска зафиксированного аппаратурно факта обнаружения объекта в контролируемой зоне, снижая влияние человеческого фактора на результаты наблюдения, предназначенных для обнаружения факта несанкционированного наблюдения, фотографирования и пр., в том числе предупреждения террористических актов с применением оптоэлектронных приборов и аппаратуры с элементами оптики.
В уровне техники вопросы обнаружения сигнала средствами оптической локации рассмотрены достаточно подробно [Волохатюк В.А., Кочетков В.М., Красовский Р.Р. Вопросы оптической локации./Под ред. Красовского Р.Р.- М.: Советское радио, 1971, с. 66-69, 100-102, 130, 148, 176-180]. Как правило, в состав излучающего устройства входит излучатель и выходная оптическая система. В качестве излучателя используется оптический квантовый генератор (ОКГ) или другой источник света. Выходная оптическая система может включать в себя оптику, формирующую требуемую диаграмму направленности и сканирующее устройство, обеспечивающее необходимый обзор пространства. В реальных условиях тракт распространения сигнала содержит источник помех, влияние которых сказывается и на прямом и на отраженном сигналах, однако преобладающим оказывается их воздействие на отраженный сигнал.
Для наибольшей концентрации энергии излучения в заданном направлении угловая характеристика излучателя выбирается весьма узкой. При этом существенной составной частью расчетов световых полей является определение светорассеяния от пространственно-ограниченного узкоколлимированного источника. В обычных условиях цель рассеивает световой сигнал диффузно, что приводит к переизлучению зондирующего сигнала в широкий телесный угол. Таким образом, рассчитывая ослабление светового сигнала при движении его от цели до приемного устройства локатора, следует решать задачу о поле источника, отражающего (переизлучающего) сигнал.
Указанная техническая задача аналогична решаемой в предлагаемом изобретении, поскольку спецификой обнаруживаемых оптических и оптоэлектронных объектов является зеркальный (направленный) характер отражения, при котором расходимость луча оптических локационных систем (ОЛС) до и после отражения одинакова. Зеркальным отражением объясняется "металлический" блеск чистой (без окислов) поверхности металлов, а также яркие блики при отражении света от стеклянных и водных поверхностей. В этом случае (см., например, Коростелев А. А. и др. Теоретические основы радиолокации./Под ред. Дулевича В.Е., изд. 2-е. - М.: Советское радио, 1978, с. 503-509, 514-519) приближенную оценку зеркального коэффициента отражения Ri, можно выполнить по формулам Френеля. При нормальном падении светового потока на диэлектрическую поверхность из формул Френеля следует
Ri=(n-1)2/(n+1)2,
где n - показатель преломления материала поверхности; так, например, при отражении светового потока от стеклянной поверхности, для которой n = 1,5 (что является наиболее типичным для разновидности объектов, обнаруживаемых согласно предлагаемому способу), значение Ri = 0,04. При зеркальном рассеянии угловая расходимость отраженного светового потока в 104-105 раз меньше, чем при диффузном, имея при этом в виду, что реальные цели, как правило, не являются ни ламбертовыми диффузными отражателями, ни рассеивателями зеркального типа, а представляют собой их комбинацию. Указанное обстоятельство, исходя из вида цели, создает предпосылки для надежного выделения сигнала над помехой, однако в данном случае, кроме необходимости учета нестационарных явлений при распространении света, нужно учитывать возможность наличия световых помех, попадающих в апертуру приемного устройства, которые сводят на нет те преимущества, которые присутствуют при работе с бликующими источниками излучения. Именно указанное является тем недостатком, на устранение которого направлено данное изобретение.
Из патентных источников известна лазерная система наблюдения за местностью с дискретным стробированием дальности, содержащая импульсный лазер подсветки, стробированный детектор изображения и многоцветную систему индикации, каждый цвет которой связан с определенным участком дальности (GB 1262416, H 4 D, 02.02.72).
Указанное техническое решение, решая задачу наблюдения, не позволяет, однако, достоверно работать в условиях мешающих засветок, так как не защищено от естественных и искусственных помех, что можно отнести к ее недостаткам.
Известно и другое техническое решение, а именно патент FR N 1605187, опубликованный 25.05.73, в котором предусмотрено использование достаточно сложных кодов с последующей корреляционной обработкой принятого и опорного сигналов для решения задачи борьбы с помехами, однако данный метод не использует телевизионный метод преобразования, который положен в основу предлагаемого способа, поскольку позволяет визуализировать текущую информацию об окружающей обстановке. Кроме того, видеосигнал, поступающий с датчика, если это необходимо, может быть записан на тот или иной носитель для последующего просмотра. Обработка сигнала в телевизионной системе преследует несколько целей. Одна из них заключается в том, что путем количественного перераспределения информационных показателей входного изображения, таких как четкость, число градаций яркости и др., наилучшим образом согласовать его со зрительным анализатором оператора.
Другая цель состоит в том, чтобы выделить или подчеркнуть в исходном изображении те признаки, которые необходимы для решения задачи обнаружения и/или опознавания объекта. В этом случае окончательное решение может приниматься как непосредственно оператором с помощью видеоконтрольного устройства, так и с помощью классификатора, в памяти которого хранятся отличительные признаки исследуемого объекта.
Ближайшим аналогом предлагаемого изобретения выбран пассивно-активный способ наблюдения, в том числе ночью и при плохой видимости, описанный в книге Орлова В.А., Петрова В.И. Приборы наблюдения ночью и при ограниченной видимости.- М.: Военное издательство, 1989, с. 116-118.
В указанном источнике информации описан способ, согласно которому цель освещается короткими импульсами лазера с длительностью, меньшей времени прохождения импульса подсветки до цели и обратно, при этом предусмотрено стробирование по дальности и глубине обзора при приеме отраженного сигнала, осуществляемое с помощью пассивного электронно-оптического прибора наблюдения, открываемого только тогда, когда отраженный от цели сигнал достигнет объектива, в результате чего в прибор не попадает паразитная засветка от взвешенных в атмосфере частиц пыли, влаги, дыма, что обеспечивает увеличение дальности наблюдения. Однако и данный способ не свободен от такого недостатка, как ухудшение соотношения сигнал/помеха при внешней подсветке, так как не содержит средств, устраняющих это влияние, или позволяющих селектировать интересующий вид сигнала.
Для устранения указанного недостатка предлагается способ обнаружения оптических средств и средств оптоэлектронного типа, основанный на зондировании контролируемого объема пространства сканируемым импульсным лазерным излучением, приеме оптических сигналов изображения в спектральном диапазоне отраженного лазерного излучения с заданной дальности и прилегающего к ней участка пространства, определяемого глубиной наблюдения, преобразовании принятых сигналов изображения в видеосигнал, пороговой селекции совокупности принятых видеосигналов для устранения мешающего фонового изображения, в котором зондирование контролируемого объема пространства осуществляют с частотой повторения импульсов лазерного излучения, равной fc/n, где fс частота строк используемого телевизионного метода преобразования сигналов, n - натуральное число, удовлетворяющее условию n≤fс/fк, а fк - частота кадров используемого телевизионного метода преобразования сигналов, при этом излучаемую последовательность лазерных импульсов кодируют путем амплитудной манипуляции с частотой fк/m, где m - натуральное число, удовлетворяющее условию 2≤m≤fк/2 выявляют из числа принятых видеосигналов, превысивших порог, видеосигналы, коррелированные с кодом амплитудной манипуляции излученной последовательности импульсов, и при их наличии автоматически формируют сигнал тревоги, а после преобразования видеосигналов, коррелированных с кодом амплитудной манипуляции излученной последовательности импульсов в оптическое изображение, фиксируют с помощью оператора утомляющее мерцание яркости телевизионного экрана с частотой амплитудной манипуляции.
Указанный способ может быть реализован с помощью устройства, представленного на структурной схеме, где введены следующие обозначения:
1 - Обнаруживаемый объект;
2 - Входной объектив;
3 - Электронно-оптический преобразователь (ЭОП);
4 - Репродукционный объектив;
5 - Телевизионная камера (ТВК);
6 - Видеоконтрольное устройство (ВКУ);
7 - Блок обработки видеосигнала (БОВ);
8 - Блок затворных импульсов (БЗИ);
9, 11 - Импульсные источники высокого напряжения;
10 - Синхронизатор;
12 - Лазер;
13 - Модулятор;
14 - Делитель кадровой частоты;
15 - Пульт управления;
16 - Схема автоматической регулировки усиления (АРУ);
17 - Вторичный источник питания (ВИЛ).
Реализация заявляемого способа осуществляется следующим путем.
Контролируемый объем пространства, в котором предполагается нахождение обнаруживаемого объекта (1), облучается с помощью лазера (12) сканируемым импульсным излучением с частотой повторения fс/n и одновременной амплитудной манипуляции с частотой fк/m, осуществляемых модулятором (13) и делителем кадровой частоты (14) телевизионной камеры (5). Излучение лазера (12), отраженное от объекта (1) и других объектов в контролируемом объеме пространства, принимается объективом (2), который формирует изображение проекции лоцируемого объема пространства на входном фотокатоде ЭОП'а (3). Сигналы изображения, усиленные ЭОП'ом (3), через репродукционный объектив (4) проецируются на фоточувствительный элемент ТВК (5). Видеосигналы с выхода ТВК (5) поступают на видеоконтрольное устройство (6), блок обработки видеосигнала (7), синхронизатор (10) и схему АРУ (16). Синхронизатор (10) обеспечивает синхронную работу импульсных источников высокого напряжения (9) и (11), формирование синхроимпульсов, управляющих модулятором (13), делителем кадровой частоты (14), лазером (12), блоком затворных импульсов (8) и блоком обработки видеосигналов.
Отраженный от цели сигнал усиливается в ЭОП'е (3) только в интервале времени, определяемом длительностью затворных импульсов τ3, что соответствует глубине мгновенно просматриваемого участка ΔR = cτ3/2, где c - скорость света. Изменение задержки затворных импульсов относительно импульсов излучения лазера определяют дальность, с которой принимаются сигналы, отраженные от объектов. Изменяя взаимное положение затворных импульсов и импульсов излучения лазера с пульта управления (15), обеспечивают последовательный просмотр контролируемого пространства по глубине с дискретом ΔR. Амплитудная манипуляция, примененная по отношению к последовательности излучаемых импульсов с частотой fк/m, составляющая при выбранных значениях m частоту в диапазоне ≈3-5 Гц, реализуемая с помощью сигналов, поступающих с делителя кадровой частоты (14), позволяет для селекции принятых отраженных от обнаруживаемого объекта использовать критерий их коррелированности с излученными импульсами при обработке в блоке обработки видеосигнала (7), в результате чего их изображение на экране ВКУ будет мерцать с указанной частотой, которая, являясь близкой к частоте α-ритмов головного мозга вызывает утомляющее воздействие, что соответствующим образом воздействуя на наблюдателя-оператора, автоматически привлекает его внимание, не допуская пропуска факта объективного наличия объекта, подлежащего обнаружению. Этот параметр позволяет обеспечить выделение отраженных сигналов на фоне посторонних засветок, таких, например, как автомобильные фары, лампы освещения окна квартир и др., а блок обработки видеосигнала (7) автоматически выдаст сигнал тревоги.
Схема автоматической регулировки усиления, управляя диафрагмами объективов (2) и (4) и усилением ЭОП'а, обеспечивает поддержание оптимального уровня сигнала на входе ТВК (5) при изменении уровня сигнала на зрачке входного объектива (2). При этом используются ЭОП'ы последних поколений, позволяющие осуществлять указанные регулировки.
Используемый для распознавания сигналов определенного вида корреляционный метод, реализуется запоминанием в блоке обработки видеосигналов (7) того кода, который определяет работу блока делителя кадровой частоты (14), на соответствие которому проверяется отраженный сигнал, поступивший на вход блока обработки видеосигнала (7), превысивший порог, установленный для устранения фонового уровня.
В случае, если значение коэффициента корреляции, установленное по результатам испытаний, превышено, автоматически срабатывает тревожный сигнал, а выделенные информационные сигналы, преобразованные в оптическое изображение, поступая на видеоконтрольное устройство (6), позволяют привлечь внимание оператора, поскольку экран, мигая с частотой примененного для амплитудной манипуляции кода, является фактором, влияющим на физиологию человека, что позволяет уменьшить вероятность пропуска факта обнаружения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1998 |
|
RU2129287C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТОЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278399C2 |
| УСТРОЙСТВО ОЧИСТКИ ПОВЕРХНОСТИ МАТЕРИАЛА ОТ ОКСИДНОЙ ПЛЕНКИ | 1997 |
|
RU2112078C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2006 |
|
RU2324145C1 |
| ЛАЗЕРНАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1996 |
|
RU2113717C1 |
| СПОСОБ РЕГИСТРАЦИИ ДИФФУЗНО ОТРАЖЕННОГО ИЛИ ДИФФУЗНО РАССЕЯННОГО ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2011 |
|
RU2458361C1 |
| СПОСОБ И УСТРОЙСТВО ВИЗУАЛИЗАЦИИ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ЗОНЕ НА ЗАДАННОМ УДАЛЕНИИ ОТ ОПЕРАТОРА | 2007 |
|
RU2343503C2 |
| ЛАЗЕРНЫЙ ИНФРАКРАСНЫЙ ПРИЦЕЛ | 1996 |
|
RU2104461C1 |
| СПОСОБ ЛАЗЕРНОГО ФУНКЦИОНАЛЬНОГО ПОДАВЛЕНИЯ БПЛА | 2022 |
|
RU2796072C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1997 |
|
RU2129288C1 |
Изобретение относится к области оптической локации и представляет собой способ обнаружения и распознавания цели с использованием телевизионных методов обработки сигналов и может быть использовано при создании систем охранной сигнализации. Достигаемый технический результат заключается в обнаружении объектов в условиях действия помеховых сигналов. Способ основан на зондировании контролируемоего объема пространства сканируемым импульсным лазерным излучением, приеме оптических сигналов изображения с заданной дальности, преобразовании принятых сигналов изображения в видеосигнал, пороговой селекции, зондировании объема пространства с частотой, равной fc/ n, и кодировании излучаемой последовательности с частотой fk/m, где fc, fk - соответственно частоты строе и кадров используемого телевизионного метода преобразования сигналов, n, m - натуральные числа, удовлетворяющие условию n≤fc/fk, 2 ≤m≤fk/ 2, выявлении сигнала тревоги, а после преобразования видеосигналов в оптическое изображение, фиксировании мерцания яркости телевизионного экрана с частотой амплитудной манипуляции. 1 ил.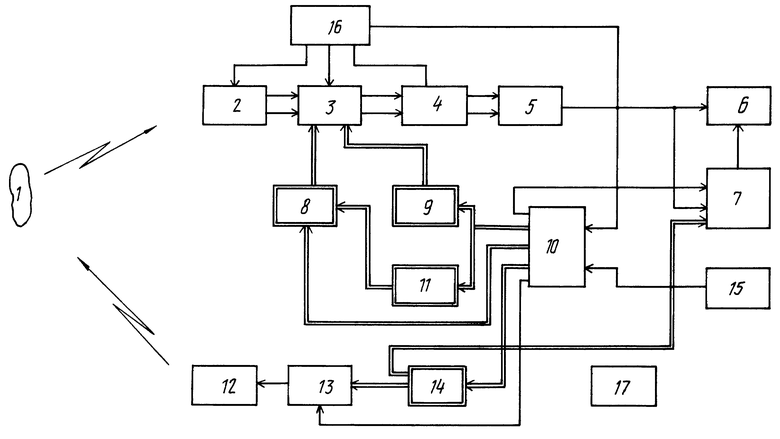
Способ обнаружения оптических средств и средств оптоэлектронного типа, основанный на зондировании контролируемого объема пространства сканируемым импульсным лазерным излучением, приеме оптических сигналов изображения в спектральном диапазоне отраженного лазерного излучения с заданной дальности и прилегающего к ней участка пространства, определяемого глубиной наблюдения, преобразовании принятых сигналов изображения в видеосигнал, пороговой селекции совокупности принятых видеосигналов для устранения мешающего фонового изображения, отличающийся тем, что зондирование контролируемого объема пространства осуществляют с частотой повторения импульсов лазерного излучения, равной fс/n, где fс частота строк используемого телевизионного метода преобразования сигналов, n-натуральное число, удовлетворяющее условию n≤fс/fk, a fk - частота кадров используемого телевизионного метода образования сигналов, при этом излучаемую последовательность лазерных импульсов кодируют путем амплитудной манипуляции с частотой fk/m, где m - натуральное число, удовлетворяющее условию 2≤m≤fk/2, выявляют из числа принятых видеосигналов, превысивших порог, видеосигналы, коррелированные с кодом амплитудной манипуляции излученной последовательности импульсов, и при их наличии автоматически формируют сигнал тревоги, а после преобразования видеосигналов, коррелированных с кодом амплитудной манипуляции излученной последовательности импульсов в оптическое изображение, фиксируют с помощью оператора утомляющее мерцание яркости телевизионного экрана с частотой амплитудной манипуляции.
| Орлов В.А., Петрова В.И | |||
| Приборы наблюдения ночью и при ограниченной видимости | |||
| - М.: Военное издательство, 1989, с.116-118 | |||
| Коростелев А.А | |||
| и др | |||
| Теоретические основы радиолокации/Под ред.В.Е.Дулевича | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - М.: Советское радио, 1978, с.503-509, 514-519 | |||
| Волохатюк В.А | |||
| и др | |||
| Вопросы оптической локации/Под ред.Р.Р.Красовского | |||
| - М.: Советское радио, 1971, с.66-69, 100 - 102, 130, 148, 176-180 | |||
| US 4301452 A, 17.11.81 | |||
| US 4470048 A, 04.09.84 | |||
| US 4737028 A, 12.04.88 | |||
| Дифференциальный преобразователь | 1988 |
|
SU1605187A1 |
| ДАЛЬНОМЕР | 1992 |
|
RU2010158C1 |

