зттт векторами напряжения, а выход блока приема вектора напряжения , приемной части энергосистемы и выход блока формирования вектора напряжения эталонной частоты подключены к входам блока фиксации модуля скольжения угла между этими векторами напряжения, выходы блоков фиксации модулей скольжения подключены к входам блока сравнения модулей скольжения, а первый выход блока сравнения соединен с первыми входами первого и второго элементов Иу вторые входы которых соединены с соответствующими первым и вторым выходами блока фиксации динамической перегрузки, а второй выход блока сравнения соеди868
нен с первыми входами третьего и четвертого элементов И, вторые входы которых соединены с соответствуюии«ми третьим и четвертым выходами блока фиксации динамической перегрузки, выходы первого и второго элементов И соединены с каналом аварийной информации для передачи управляющих воздействий на ограничение мощности нагрузки в приемной части энергосистемы, а выходы третьего и чет-i вертого элементов И соединены с каналом аварийной информации для передачи управляющих воздействии на ограничение мощности генера- ( торов в отправной части эиер.тосистемы.
УСТРОЙСТВО ФИКСАЦИИ ПЕРЕГРУЗКИ ЭЛЕКТРОПЕРЕДАЧИ, содержащее блок формирования вектора напряжения в выделенной точке отправной части энергосистемы, блок формирования вектора напряжения в выделенной точке приемной части энергосистемы, блок приема вектора напряжения отправной части энергосистемы, блок приема вектора напряжения приемной части энергосистемы, телемеханический канал между блоком формирования вектора напряжения в выделенной точке отправной части энергосистемы и блоком приема вектора напряжения отправной части энергосистемы, телемеханический канал межлу блоком формирования вектора напряжения в выделенной точке приемной части энергосистемы If блоком приема вектора напряжения приемной части -нергосистемы, блок фиксации динамической перегрузки по факту изменения угла между векторами напряжения в выделенных точках отправной и приемной частей энергосистемы и его скольжения, каналы аварийной информации для передачи управляющих воздействий на ограничение мощности нагрузки и генераторов, причем выходы блока приема вектора напряжения отправной части энергосистемы и блока приема вектора напряжения приемной части энергосистемы присоединены к входам блока фиксации динамической перегрузки, отличающееся тем, что, с целью повышения селективности вьтолнения управляющих воздействий (Л в виде ограничения мощности нагрузки в приемной части энергосистемы при аварийном дефиците в приемной части энергосистемы или в виде ограничения мощности генераторов в отправной части энергосистемы при аварийном избытке в отправной части энергосистемы, оно снабжено блоком формирования вектора напряжения эталонной частоты, блоком фиксации модуля сколь00 жения угла между вектором напряжения Ci отправной части энергосистемы и век00 тором напряжения эталонной частоты, блоком фиксации модуля скольжения угла между вектором напряжения приемной части энергосистемы и вектором напряжения эталонной частоты, блоком сравнения модулей, скольжения, четырьмя- элементами И, причем выход блока приема вектора напряжения отправной части энергосистемы и выход блока формирования вектора напряжения эталонной частоты подключены к пходам блока фиксации модуля скольжения угла между
1
Изобретение относится к энергетике а именно к противоаварийной автоматике энергосистем.
Как известно, динамическая перегрузка линий межсистемной связи 220-330-500-750 кВ, связывающих две энергосистемы (объединения), отправную и приемную,может иметь место . в результате аварийного дефицита в приемной энергосистеме или аварийного избытка в отправной энергосистеме.
На современных линиях межсистемной связи необходимо различать динамическую перегрузку при аварийном дефиците 11 при аварийном избытке. В частности, по условию сохранения устойчивости в установивщемся послеаварийном режиме при аварийном избытке в отправной энергосистеме (С, ) требуется ограничение активной мощности генераторов (ОГ) в Cof, а при аварийном дефиците в приемной энергосистеме (С требуется ограничение активной мощности нагрузки (ОН) в С,р. Противоположные воздействия (при избытке в CQ ОН в Срр , при дефиците в ОГ в Сот) недопустимы, так как способствуют дополнительному увеличению небаланса активной мощности и нарушению устойчивости в установившемся послеаварийном режиме.
Известны устройства, основанные на измерении предшествующей мощности
в тех элементах сети, отключение которых приводит к аварийному избытку или дефициту, и фиксации факта отключения этих элементов ij .
Однако при использовании этих устройств требуется информация об отключении таких элементов, как генераторы и узлы нагрузки,
Известны устройства, основанные на фиксации сброса мощности непосредственно в момент повреждения при отключении элементов сети, приводящем к аварийному избытку или дефициту 2 .
Недостаток известных устройств заключается в том, что сброс мощности должен быть измерен именно при отключении элементов сети, а не при предшествующем этому к.з. или при качаниях.
Известны устройства, основанные на фиксации наброса активной мощности на остающиеся генераторы приемной энергосистемы при отключении там части генераторов (аварийньш дефицит) или сброса активной мощности генераторов отправной, системы при отключении там части нагрузки (аварийный избыток), или наброса передаваемой активной мопшости в обоих этих случаях з.
Однако последнее не позволяет отличить аварийный дефицит от аварийного избытка. Кроме того, нужно знать распределение общего наброса между контролируемы ш и неконтроли- руемыми генераторами.
Для реализации указанных способов с целью различия дефицитов от избытков в сложной сети, особенно с линиями слабой межсистемной связи, требуется большой объем телеинформацйи.
Из-за затруднений в различии.аварийного дефицита в приемной системе от аварийного избытка в отправной ситеме, при которых перегрузка линий связи, сопровождаемая увеличением взаимного угла и активной мощности, имеет идентичный качественный и даже количественный характер, отсутствует возможность правильного выбора направления (в приемной или отправной системе) и вида управляющего воздействия (ОГ или ОН) для сохранения устойчивости при фиксации динамической перегрузки даже наиболее совер- шенными устройствами, фиксирующими .взаимный угол 8 и его скольжение.
Наиболее близким к предлагаемому является устройство, содержащее блок формирования вектора напряжения в выделенной точке отправной час ти энергосистемы, блок формирования вектора напряжения в вьщеленной .точке приемной части энергосистемы, блок приема вектора напряжения отправной части энергосистемы, блок приема вектора напряжения приемной части энергосистемы, телемеханически канал между блоком формирования вектора напряжения отправной части энергосистемы и блоком приема вектора напряжения отправной части энергосистемы, телемеханический канал межд блоком формирования вектора напряжения приемной части энергосистемы и блоком приема вектора напряжения приемной части энергосистемы, блок фиксации динамической перегрузки . по факту изменения угла между векторами напряжения в выделенных точках отправной и приемной частей энергосистемы и его скольжения, каналы аварийной информации для управляющих воздействий на ограничение мощности нагрузки, причем выходы блока приема вектора напряжения отправной части энергосистемы и блок приема вектора напряжения приемной части энергосистемы присоединены
к входам блока фиксации динамической перегрузки М.
Однако при фиксации динамической перегрузки в результате аварийного избытка в отправной части энергосистемы и выполнении от такого устройства управляющего воздействия на ОН в приемной части энергосистемы увели. чивается результирующий небаланс (избыток) активной мощности и излишн ограничивается нагрузка, что создает прямой экономический ущерб, в то время как при указанном избытке необходимо выполнять ОГ в отправной части энергосистемы. При фиксации динамической перегрузки в результате аварийногодефицита в приемной части энергосистемы и выполнении от такого устройства управляющего воздействия на ОГ в отправной части энергосистемы увеличивается результирующий небаланс (дефицит) активной мощности во всей энергосистеме, что создает опасность нарушения устойчивости по другим линиям связи в послеаварийном режиме под действием регуляторов скорости турбин.
Цель изобретения - повышение селетивности выполнения управляющих воздействий в виде ограничения мощности нагрузки в приемной части энергосистемы при аварийном дефиците в приемной части энергосистемы или в виде ограничения мощности генераторов в отправной части энергосистемы при аварийном избытке в отправной части энергосистемы.
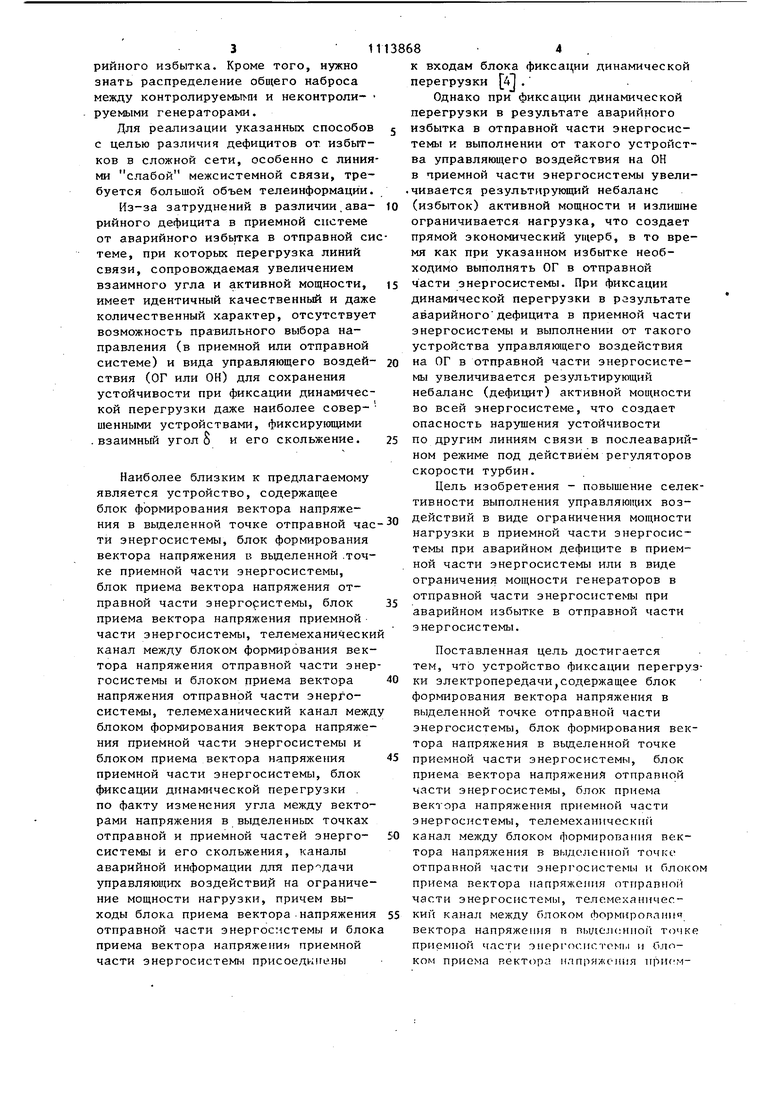
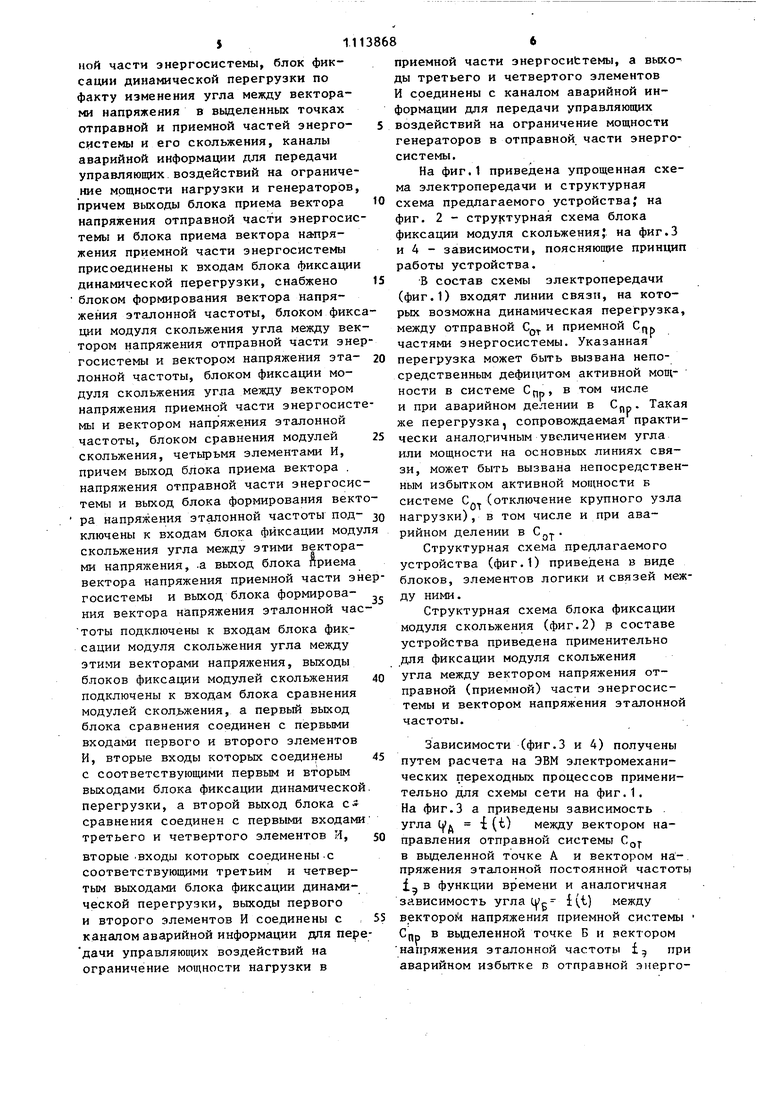
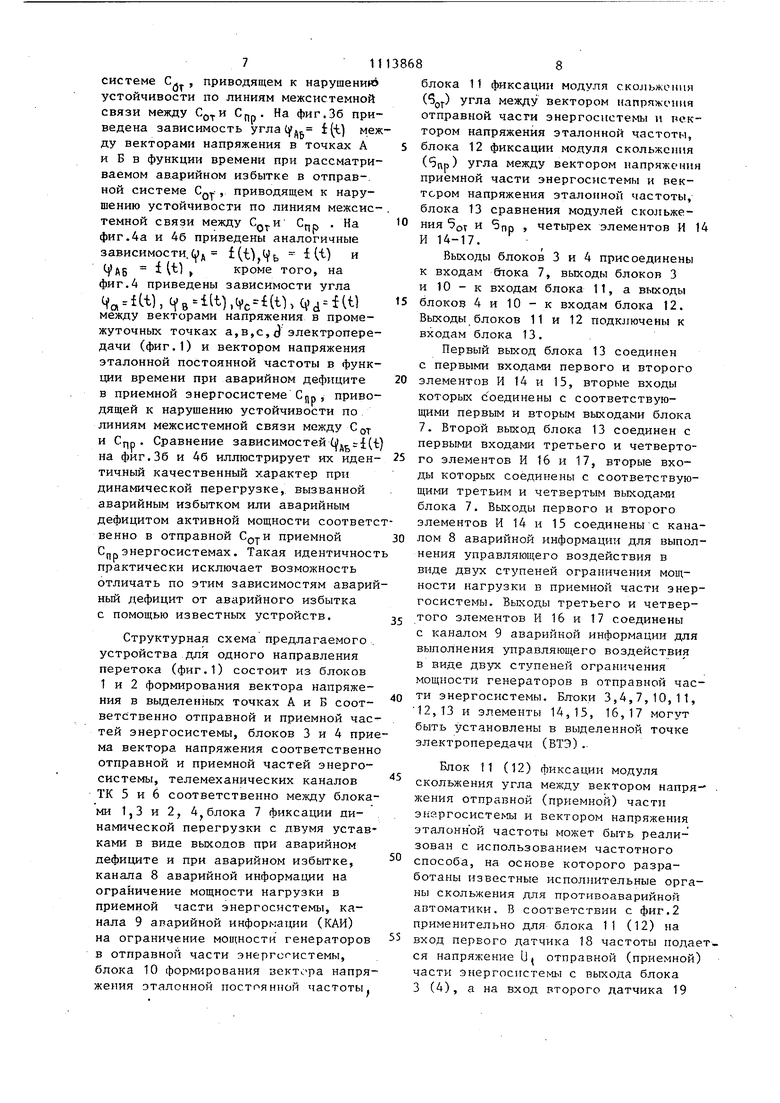
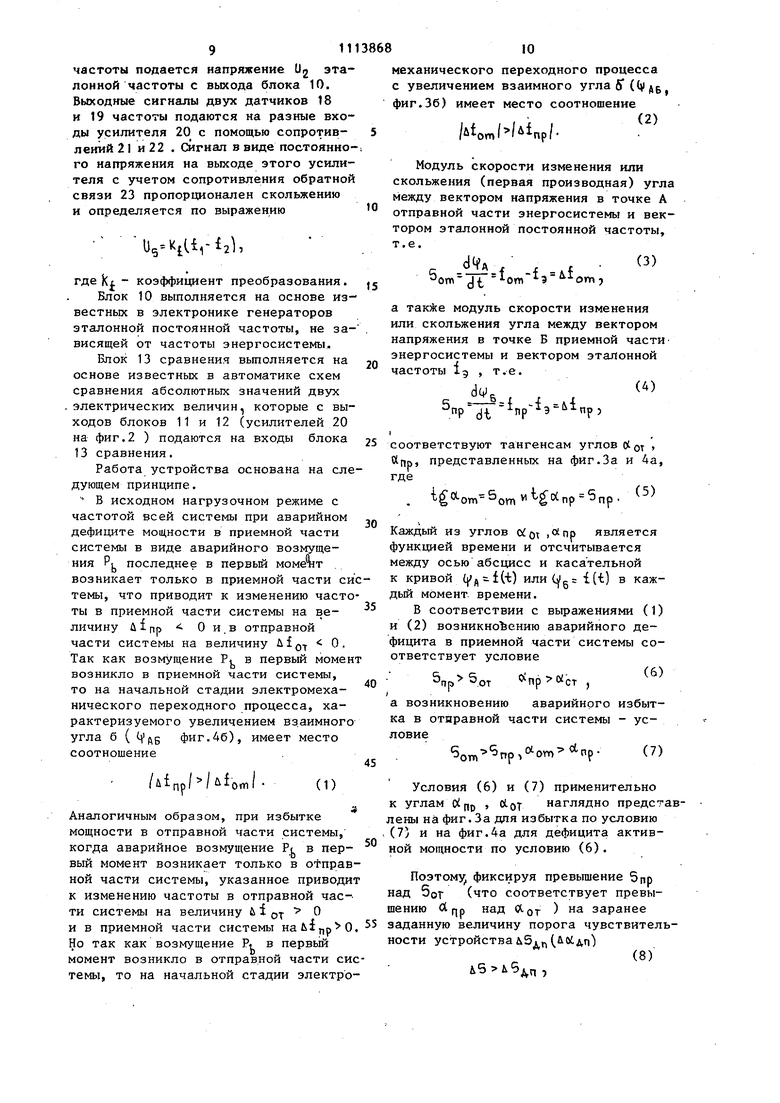
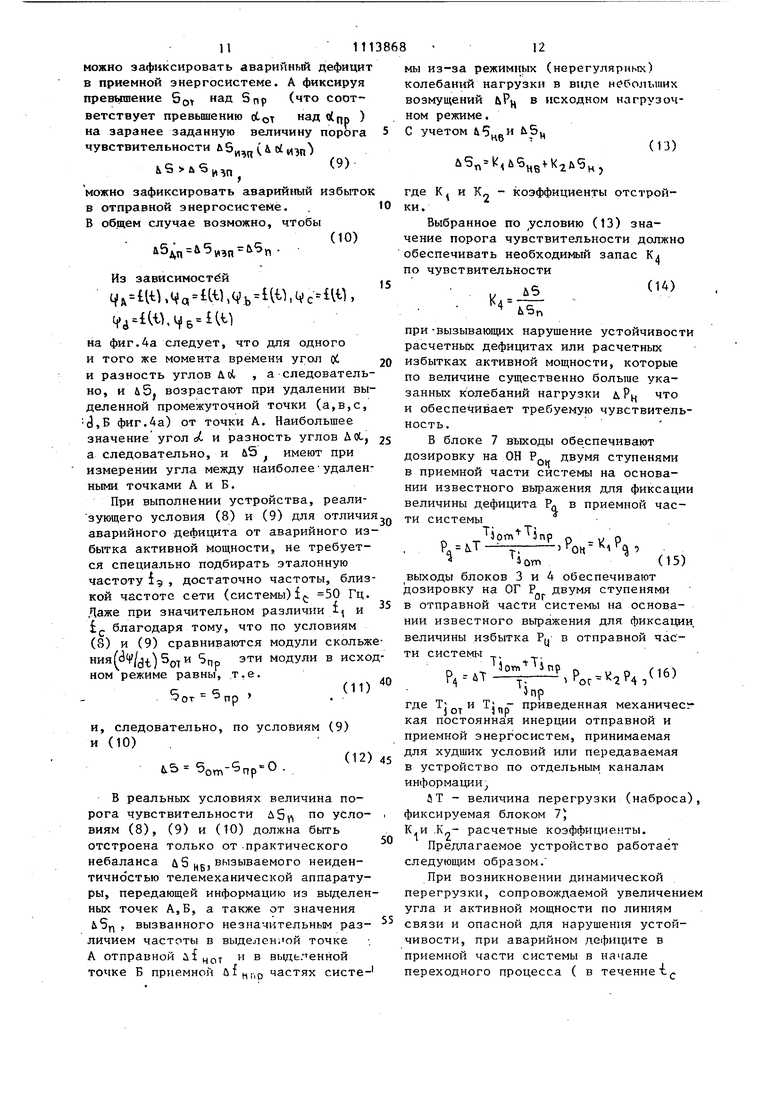
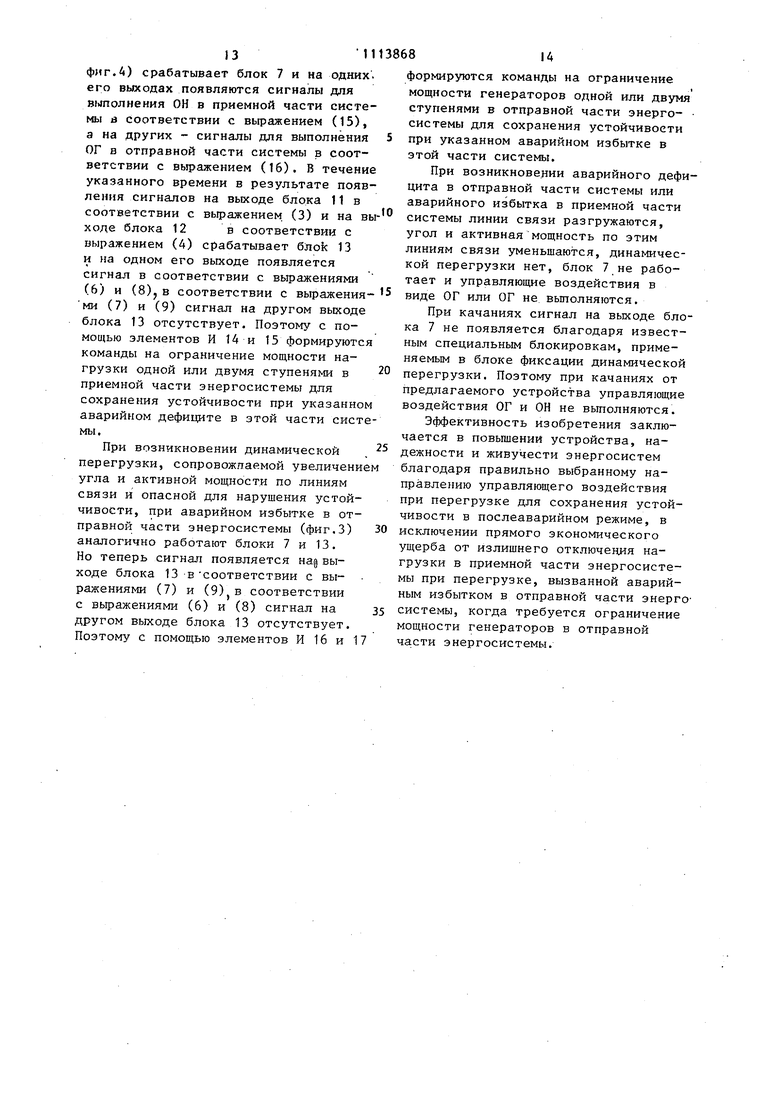
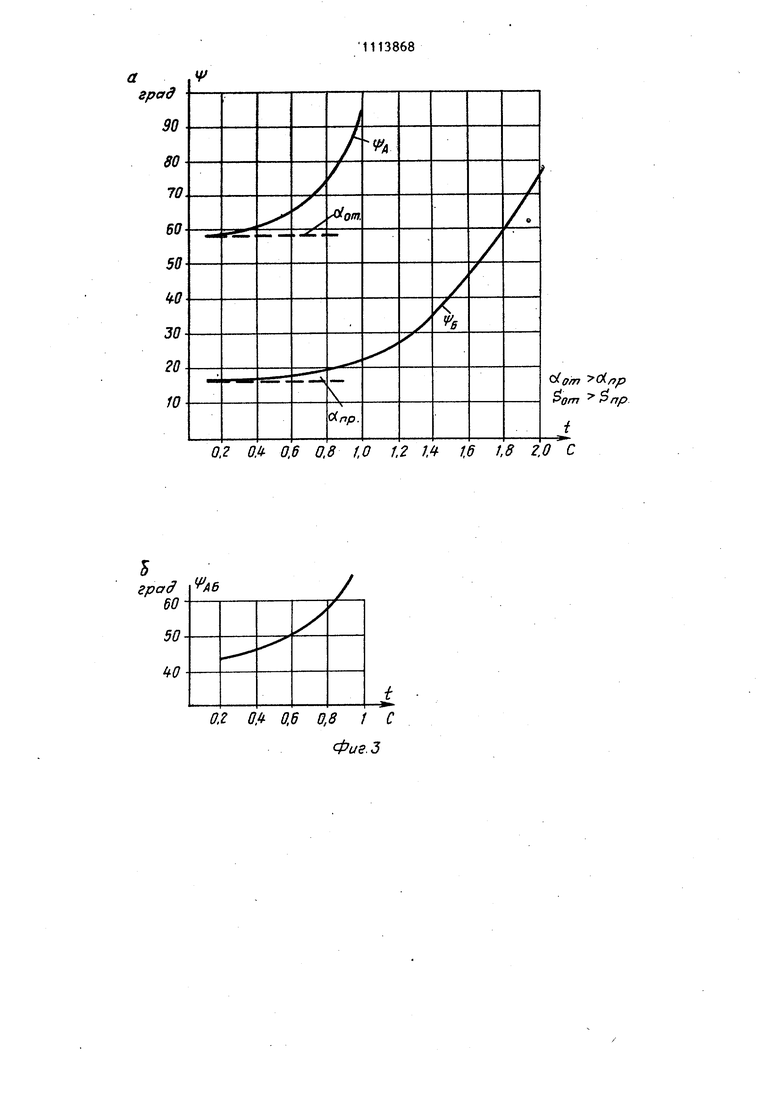
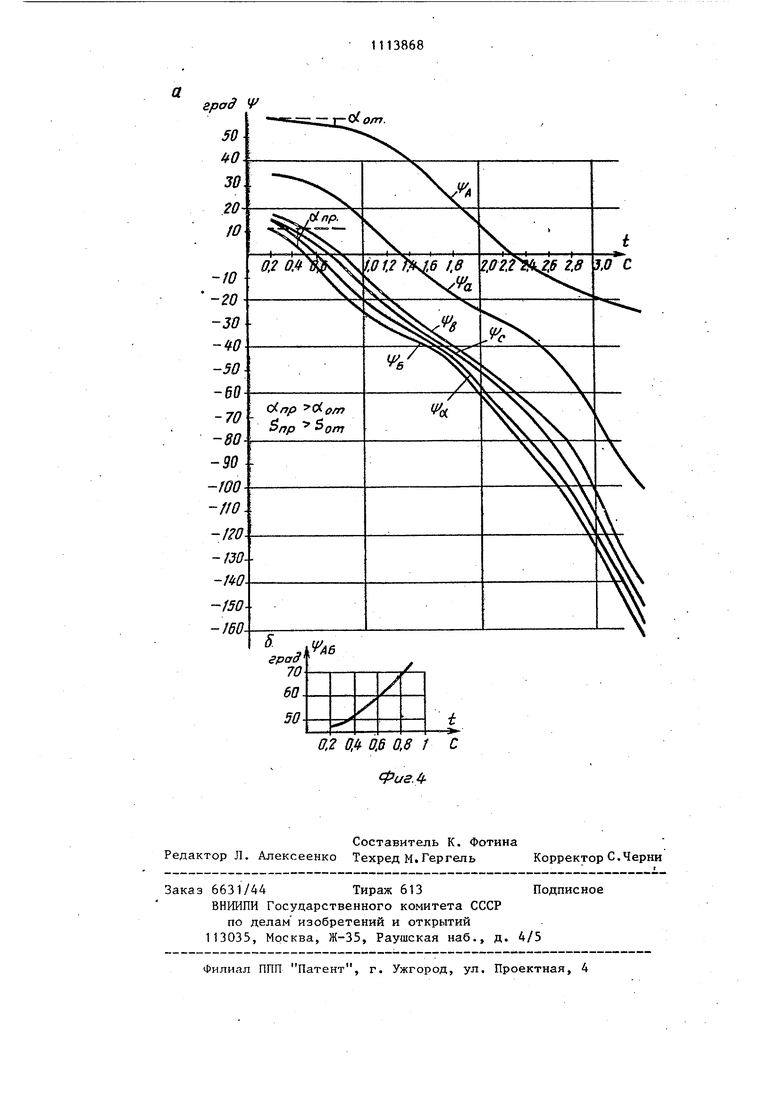
Поставленная цель достигается тем, что устройство фиксации перегруки электропередачи содержащее блок формирования вектора напряжения в выделенной точке отправной части энергосистемы, блок формирования вектора напряжения в выделенной точке приемной части энергосистемы, блок приема вектора напряжения отправной части энергосистемы, блок приема вектора напряжения прием юй части энергосистемы, телемеханически канал между блоком формирования вектора напряжения в выделенной точгсе отправной части энергосистемы и блок приема вектора напряжения отправной части энергосистемы, те.пе.механический канал между блоком формироплнич вектора напряжения в nijUiejicHiioit точк приемной части энергосистемы и O.iioком приема вектора илпрях еиия приемной части энергосистемы, блок фиксацин динамической перегрузки по факту изменения угла между векторами напряжения в выделенных точках отправной и приемной частей энергосистемы и его скольжения, каналы аварийной информации для передачи управляющих воздействий на ограниче ние мощности нагрузки и генераторов причем выходы блока приема вектора напряжения отправной части энергосис темы и блока приема вектора на пряжения приемной части энергосистемы присоединены к входам блока фиксаци динамической перегрузки, снабжено блоком формирования вектора напряжения эталонной частоты, блоком фик ции модуля скольжения угла между век тором напряжения отправной части эне госистемы и вектором напряжения эталонной частоты, блоком фиксации модуля скольжения угла между вектором напряжения приемной части энергосист мы и вектором напряжения эталонной частоты, блоком сравнения модулей скольжения, четырьмя элементами И, причем выход блока приема вектора . напряжения отправной части энергосис темы и выход блока формирования вект ра напряжения эталонной частоты подключены к входам блока фиксации моду скольжения угла между этими векторами напряжения, .а выход блока йриема вектора напряжения приемной части э госистемы и выход блока формирования вектора напряжения эталонной час тоты подключены к входам блока фиксации модуля скольжения угла между этими векторами напряжения, выходы блоков фиксации модулей скольжения подключены к входам блока сравнения модулей скол жения, а первый выход блока сравнения соединен с первыми входами первого и второго элементов И, вторые входы которых соединены с соответствующими первым и вторым выходами блока фиксации динамической перегрузки, а второй выход блока с сравнения соединен с первыми входами третьего и четвертого элементов И, вторые .входы которых соединены-с соответствующими третьим и четвертым выходами блока фиксации динамической перегрузки, выходы первого и второго элементов И соединены с каналом аварийной информации для пере дачи управляющих воздействий на ограничение мощности нагрузки в приемной части энергосиЬтемы, а выходы третьего и четвертого элементов И соединены с каналом аварийной информации для передачи управляющих воздействий на ограничение мощности генераторов в отправной части энергосистемы. На фиг.1 приведена упрощенная схема электропередачи и структурная схема предлагаемого устройства, на фиг. 2 - структурная схема блока фиксации модуля скольжения на фиг.З и 4 - зависимости, поясняюпще принцип работы устройства. В состав схемы электропередачи (фиг.1) входят линии связи, на которых возможна динамическая перегрузка, между отправной С-,, и приемной С пр Указанная частями энергосистемы, перегрузка может быть вызвана непосредственным дефицитом активной мощности в системе С В ТОМ числе и при аварийном делении в . Такая же перегрузка, сопровождаемая практически аналогичным увеличением угла или мощности на основных линиях связи, может быть вызвана непосредственным избытком активной мощности Б системе С..(отключение крупного узла нагрузки), в том числе и при аварийном делении в С Структурная схема предлагаемого устройства (фиг.1) приведена в виде блоков, элементов логики и связей между ними. Структурная схема блока фиксации модуля скольжения (фиг.2) в составе устройства приведена применительно для фиксации модуля скольжения угла между вектором напряжения отправной (приемной) части энергосистемы и вектором напряжения эталонной частоты. Зависимости (фиг.З и 4) получены путем расчета на ЭВМ электромеханических переходных процессов применительно для схемы сети на фиг.1. На фиг.З а приведены зависимость . угла (уд i: (t) между вектором направления отправной системы Cgiв выделенной точке А и вектором наряжения эталонной постоянной частоты i в функции времени и аналогичная ависимость угла ц;с i(t) между eктopo lI напряжения приемной системы ,р в вьщеленной точке Б и вектором апряжения эталонной частоты ;, при варийном избытке п отправной энергосистеме С.. , приводящем к нарушений устойчивости по линиям межсистемной связи между Cj,. На фиг.Зб приведена зависимость угла (f, f(-t) меж ду векторами напряжения в точках А и Б в функции времени при рассматриваемом ав.арийном избытке в отправ-. ной системе С приводящем к нарушению устойчивости по линиям межсисСПР На темной связи между фиг.4а и 4б приведены аналогичные зависимости.()д (1),Уь W t))ftg f (t) кроме того, на фиг.А приведены зависимости угла Чa ),fв i lc--Mtl,( между векторами напряжения в промежуточных точках а,в,с,j электропередачи (фиг.1) и вектором напряжения эталонной постоянной частоты в функции времени при аварийном дефиците в приемной энергосистеме С приводящей к нарушению устойчивости по линиям межсистемной связи между С . Сравнение зависимостей ((на фиг.Зб и 4б иллюстрирует их идентичный качественный характер при динамической перегрузке, вызванной аварийным избытком или аварийным дефицитом активной мощности соответс венно в отправной Сд-рИ приемной С(,рэнергосистемах. Такая идентичнос практически исключает возможность отличать по этим зависимостям аварий ный, дефицит от аварийного избытка с помощью известных устройств. Структурная схема предлагаемого устройства для одного направления перетока (фиг.1) состоит из блоков 1 и 2 формирования вектора напряжения в выделенных точках А и Б соответственно отправной и приемной час тей энергосистемы, блоков 3 и 4 при ма вектора напряжения соответственн отправной и приемной частей энергосистемы, телемеханических каналов ТК 5 и 6 соответственно меткду блока ми 1,3 и 2, 4Jблока 7 фиксации динамической перегрузки с двумя устав ками в виде выходов при аварийном дефиците и при аварийном избытке, канала 8 аварийной информации на ограничение мощности нагрузки в приемной части энергосистемы, канала 9 аварийной информации (КАИ) на ограничение мощности генераторов в отправной части энергосистемы, блока 10 формирования зектсфа напря жения эталонной постоянной частоты 11 8 блока 11 фиксации модуля скольжения (50) угла между вектором напряжения отправной части энергосистемы и вектором напряжения эталонной частоты, блока 12 фиксации модуля скольжения (бпр) угла между вектором напряжения приемной части энергосистемы и вектором напряжения эталонной частоты, блока 13 сравнения модулей скольжения ot и бпр , четырех элементов И 14 И 14-17. Выходы блоков 3 и 4 присоединены к входам &1ока 7, выходы блоков 3 и 10 - к входам блока 11, а выходы блоков 4 и 10 - к входам блока 12. Выходы блоков 11 и 12 подключены к входам блока 13. Первый выход блока 13 соединен с первыми входами первого и второго элементов И 14 и 15, вторые входы которых Соединены с соответствующими первым и вторым выходами блока 7. Второй выход блока 13 соединен с первыми вxoдa ш третьего и четвертого элементов И 16 и 17, вторые входы которых соединены с соответствующими третьим и четвертым выходамрг блока 7. Выходы первого и второго элементов И 14 и 15 соединены с каналом 8 аварийной информации для выполнения управляющего воздействия в виде двух ступеней ограничения мощности нагрузки в приемной части энергосистемы. Выходы третьего и четвертого элементов И 16 и 17 соединены с каналом 9 аварийной информации для выполнения управляющего воздействия в виде двух ступеней ограничения мощности генераторов в отправной части энергосистемы. Блоки 3,4,7,10,11, 12,13 и элементы 14,15, 16,17 могут быть установлены в выделенной точке электропередачи (ВТЭ). Блок II (12) фиксации модуля скольжения угла между вектором напря- . жения отправной (приемной) части эняргосистемы и вектором напряжения эталонной частоты может быть реализован с использованием частотного способа, на основе которого разработаны известные исполнительные органы скольжения для противоаварийной автоматики. В соответствии с фиг.2 применительно для блока 11 (12) на вход первого датчика 18 частоты подает, ся напряжение U отправной (приемной) части энергосистемы с выхода блока 3 (4), а на вход второго датчика 19 11 частоты подается напряжение U2 эталонной частоты с выхода блока 10. Выходные сигналы двух датчиков 18 и 19 частоты подаются на разные входы усилителя 20 с помощью сопротивлений 21 и 22 . Сигнал в виде постоянно го напряжения на выходе этого усилителя с учетом сопротивления обратной связи 23 пропорционален скольжению и определяется по выражению Og-KtUr al, где KL - коэффициент преобразования. Блок 10 выполняется на основе известньк в электронике генераторов эталонной постоянной частоты, не зависящей от частоты энергосистемы. Блок 13 сравнения вьшолняется на основе известных в автоматике схем сравнения абсолютных значений двух .электрических величин, которые с выходов блоков 11 и 12 (усилителей 20 на фиг.2 ) подаются на входы блока 13 сравнения. Работа устройства основана на сле дующем принципе. В исходном нагрузочном режиме с частотой всей системы при аварийном дефиците мощности в приемной части системы в виде аварийного возмущения Pj последнее в первьй моме%т возникает только в приемной части си темы, что приводит к изменению часто ты в приемной части системы на BeО и.в отправной личину ц i пр части системы на величину д Так как возмущение Р, в первый момен возникло в приемной части системы, то на начальной стадии электромеханического переходного процесса, характеризуемого увеличением вз.аимного угла б ( tVftB фиг.46), имеет место соотношение /ufnp/ / foftil (1) Аналогичным образом, при избытке мощности в отправной части системы, когда аварийное возмущение Р в первый момент возникает только в отправ ной части системы, указанное приводи к изменению частоты в отправной части системы на величину и в приемной части системы Habinp O но так как возмущение Р, в первый момент возникло в отправной части си темы, то на начальной стадии электро 10 механического переходного процесса с увеличением взаимного углабССудБ, фиг.36) имеет место соотношение Модуль скорости изменения или скольжения (первая производная) угла между вектором напряжения в точке А отправной части энергосистемь и вектором эталонной постоянной частоты, т.е. - - (3) с: Ах 4 Олт а также модуль скорости изменения или скольжения угла между вектором напряжения в точке Б приемной части энергосистемы и вектором эталонной частоты Ig , т.е. , ) соответствуют тангенсам углов otg , ttnp, представленных на фиг.За и 4а, где 5пр. - ц Каждый из углов . является функцией времени и отсчитывается между осью абсцисс и касательной к кривой (jfl-fH) или(уц i.(t) в каждьш момент времени. В соответствии с вьфажениями (1) и (2) возникновению аварийного дефицита в приемной части системы соответствует условие , Пр -i;i , а возникновению аварийного избытка в отправной части системы - условие5отт,5пр.,пр. Условия (6) и (7) применительно углам (X ПР наглядно представК yi лап и. Лр , ены на фиг. За дня избытка по условию (7) и на фиг.4а для дефицита активной мощности по условию (6). Поэтому фиксируя превышение 5пр над 5от (что соответствует превышению Ctfjp над (Хот ) на заранее заданную величину порога чувствительности устройства ь5дг1 ) , , и111386 можно зафиксировать авариГшый дефицит в приемной энергосистеме. А фиксируя превышение SQT Snp (что соответствует превьпиению зд ) на заранее заданную величину порога 5 чувствительности Лб„, ( & of изн JiS uQ можно зафиксировать аварийный избыток в отправной энергосистеме. В общем случае возможно, чтобы (10) u5j;n &5v,,n uSo. Из зависимостей Ц1д Ц1КЧа ,Ц).., (.iW. на фиг.4а следует, что для одного и того же момента времени угол QL и разность углов ДоС , а следовательно, и &5, возрастают при удалении выделенной промежуточной точки (а,в,с, ,Б фиг.4а) от точки А. Наибольшее значение угол (зС и разность углов ДОС, а следовательно, и л5 имеют при измерении угла между наиболееудален ными точками А и Б. При выполнении устройства, реализующего условия (8) и (9) для отличи аварийного дефицита от аварийного из бытка активной Мощности, не требуется специально подбирать эталонную частоту i9 достаточно частоты, близ кой частоте сети (системы) f л, 50 Гц. Паже при значительном различии , и Ь благодаря тому, что по условиям (8) и (9) сравниваются модули скольж Stip эти модули в исхо ном режиме равны, .т.е. 5, .(1) и, следовательно, по условиям (9) и (10) (12) t5 . В реальных условиях величина порога чувствительности Д5у по условиям (8), (9) и (10) должна быть отстроена только от практического небаланса 5 (,g, вызываемого неидентичностью телемеханической аппаратуры, передающей информацию из выделен ных точек А,Б, а также от значения iSfi , вызванного незначительным различием частоты в выделен ой точке А отправной if ц(-,т и в выделенной точке Б приемной uf нпо частях систе8 12 мы из-за режимных (нерегулярных) колебаний нагрузки в виде небольших возмущений ьРц в исходном нагрузочном режиме. С учетом Дб.. 5ц (13) ,., где К и К - коэффициенты отстройки. Выбранное по условию (13) значение порога чувствительности должно обеспечивать необходимый запас К по чувствительности К Д5(1) -т при-вызывающих нарушение устойчивости расчетньЕХ дефицитах или расчетньк избытках активной мощности, которые по величине существенно больше указанных колебаний нагрузки Р( что и обеспечивает требуемую чувствительность. В блоке 7 выходы обеспечивают дозировку на ОН Р двумя ступенями в приемной части системы на основании известного вьфажения для фиксации величины дефицита Р в приемной час системы Jom Jnp 5 РОИ 1 5 Jon, - (15) выходы блоков 3 и 4 обеспечивают дозировку на ОГ Р двумя ступенями в отправной части системы на основа™« известного выражения для фиксации. величины избытка Рц в отправной части системы .где Т; и приведенная механическая постоянная инерции отправной и приемной энергосистем, принимаемая для худших условий или передаваемая в устройство по отдельны каналам информации;, 5Т - величина перегрузки (наброса), фиксируемая блоком 7 К и . расчетные коэффициенты. Предлагаемое устройство работает следующим образом. При возникновении динамической перегрузки, сопровождаемой увеличением угла и активной мощности по линиям связи и опасной для нарушения устойчивости, при аварийном дефиците в приемной части системы в начале переходного процесса ( в течение ;.
фиг.А) срабатывает блок 7 и на одних, его выходах появляются сигналы для выполнения ОН в приемной части системы и соответствии с вьфажением (15), а на других - сигналы для выполнения ОГ в отправной части системы в соответствии с выражением (16). В течение указанного времени в результате появления сигналов на выходе блока 11 в соответствии с выражением (3) и на вы ходе блока 12 в соответствии с выражением (4) срабатывает блоК 13 и на одном его выходе появляется сигнал в соответствии с выражениями (6) и (8)j в соответствии с выражения- ми (7) и (9) сигнал на другом выходе блока 13 отсутствует. Поэтому с помощью элементов И 14 и 15 формируются команды на ограничение мощности нагрузки одной или двумя ступенями в приемной части энергосистемы для сохранения устойчивости при указанном аварийном дефиците в этой части системы.
При возникновении динамической . перегрузки, сопровожпаемой увеличение угла и активной мощности по линиям связи и опасной для нарушения устойчивости, при аварийном избытке в отправной части энергосистемы (фиг.З) аналогично работают блоки 7 и 13. Но теперь сигнал появляется над выходе блока 13 в соответствии с выражениями (7) и (9),в соответствии с выражениями (6) и (8) сигнал на другом выходе блока 13 отсутствует. Поэтому с помощью элементов И 16 и 17
формируются команды на ограничение мощности генераторов одной или двумя ступенями в отправной части энергосистемы для сохранения устойчивости при указанном аварийном избытке в этой части системы.
При возникновении аварийного дефицита в отправной части системы или аварийного избытка в приемной части системы линии связи разгружаются, угол и активная мощность по этим линиям связи уменьшаются, динамической перегрузки нет, блок 7 не работает и управляющие воздействия в виде ОГ или ОГ не выполняются.
При качаниях сигнал на выходе блока 7 не появляется благодаря известным специальным блокировкам, применяемым в блоке фиксации динамической перегрузки. Поэтогугу при качаниях от предлагаемого устройства управляющие воздействия ОГ и ОН не вьшолняются.
Эффективность изобретения заключается в повьпиении устройства, надежности и живучести энергосистем благодаря правильно выбранному направлению управляющего воздействия при перегрузке для сохранения устойчивости в послеаварийном режиме, в исключении прямого экономического ущерба от излишнего отключения нагрузки в приемной части энергосистемы при перегрузке, вызванной аварийным избытком в отправной части энерг системы, когда требуется ограничение мощности генераторов в отправной части энергосистемы.
..
6
/ff
fzJL
Uf
$(ofn,np
r
fj и
20
U
фиг. 2
0.2 Д4 0.6 0.8 10 1.2 1Я 1.6 18 2.0 С
О.г Q.ti- 0.6 0,8 1 С Фие.З
от 1л/7р 0гп пр
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Иофьев Б.И | |||
| Автоматическое аварийное управление мощностью энергот систем | |||
| М., Энергия, 1974, с.74-82 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
