Изобретение относится к судовым энергетическим установкам, в частности к их подвескам, и может быть использовано во всех областях народного хозяйства, где требуется защита о вибраций.
Известен компенсатор жесткости, содержащий призматические ножи, ползунки и амортизационные элементы, кинематически связанные между собой
ИНедостатком известного устройства является то, что для компенсации очень большой жесткости подвесок судовых энергетических установок, имею щих малые амплитуды колебаний (0,20,4 мм), требуются большие рабочие усилия, передаваемые призматическими ножами от амортизационного элемента на ползунок. Эти усилия обычно превьшают компенсируюпще усилия в 78 раз. При этом длина лезвия призматического ножа из условий его контакной прочности получается нерационально большой, а габариты всего компенсатора жесткости увеличиваются так, что исключается возможность размещения его в стесненном пространстве по судовой силовой установкой;
Целью изобретения является увеличение виброизоляции между объектам при одновременном уменьшении, рабочих нагрузок на лезвиях призматических ножей,
Указанная цель достигается тем, что компенсатор жесткости, содержащий призматические ножи, ползунки и амортизационные элементы, кинематически связанные между собой, снабжен установленным между объектами гидроамортизатором, в котором установлен дополнительный поршень, связанный с призматическими ножами. I
Кроме того, в поршне гидроамортизатора выполнено отверстие, в котором установлен дополнительный поршень.
При этом амортизационные элементы ползунки и призматические ножи компенсатора жесткости закреплены на поршне гидроамортизатора.
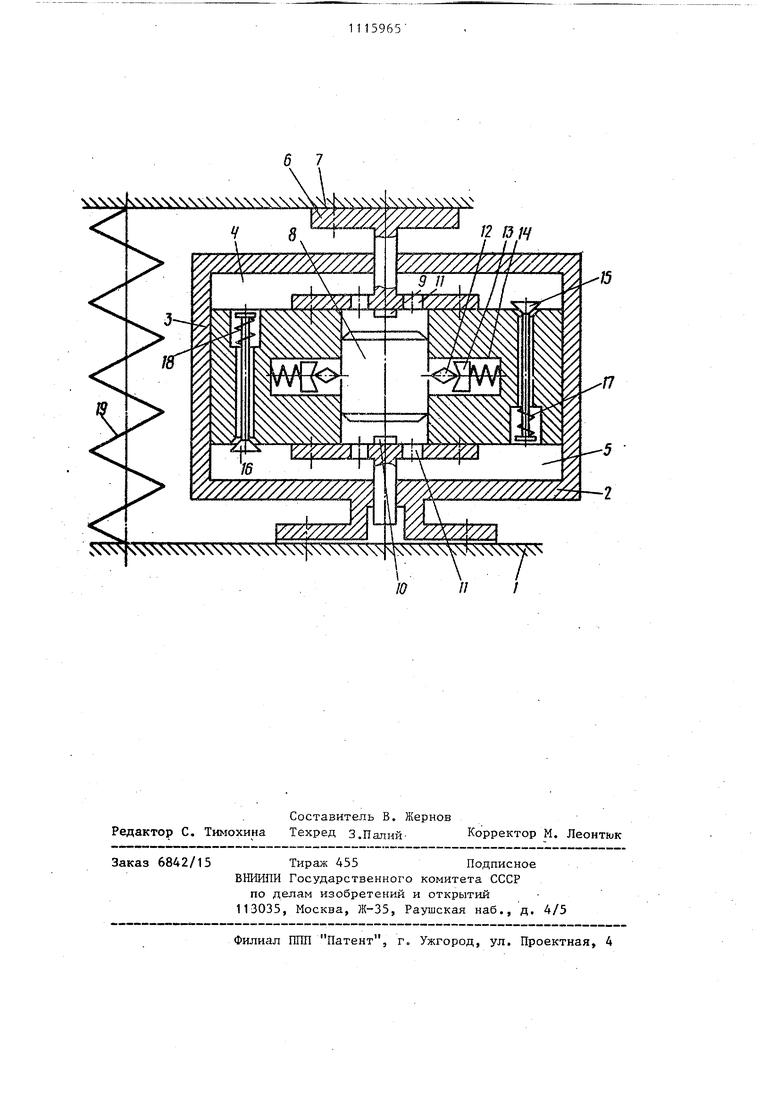
На чертеже изображена принципиальная схема предлагаемого устройства.
На защищаемом объекте 1 жестко закреплен гидроцйлиндр 2, .разделенный основным поршнем 3 на полости 4 и 5, Поршень 3 через шток 6 соединен с вибрирующим объектом 7. В отверсти основного поршня 3, соосно с Ним,
располол ен вспомогательный поршень 8, перемещения которого ограничено упорами 9 и 10, Окнами 11 обеспечивается связь вспомогательного поршня с полостями 4 и 5 гидроцилиндра. Вспомогательный поршень 8 через призматические ножи 12 и ползунки 13 связан с амортизационными элементами 14 компенсатора жесткости. Полости 4 и 5 гидроцилиндра 2 связаны обратнми клапанами 15 и 16, снабженными пружинами 17 и 18.
Компенсатор жесткости включается в виброизолирующую подвеску параллелно упругому элементу 19.
Компенсатор лсесткости работает следующим образом.
При движении объекта 7 и связанного с ним через шток 6 основного поршня 3 вниз вспомогательный поршень 8 движется вверх. На лезвиях призматических ножей 12, отклонившихся от горизонтального положения, появляется вертикальная составляющая усилия, передаваемого на ножи 12 через ползунки 13 амортизационными элементами 14. Эта составляющая усилия способствует движению вспомогательного поршня 8 вверх, что, в свою очередь, вызывает увеличение давления в полости 4. способствующее движению основного поршня 3 вниз. При достижении поршнем 8 упора 9 происходит уменьшение давления в полости
4гидроцилиндра и увеличение давления в полости 5. Это давление преодолевает силу пружины 17 и открывает обратный клапан 15, что позволяет объекту 7, штоку 6 и поршню 3 .проскользнуть вниз. Расстояние, на которое проскальзывают эти элементы, зависит от величины нагрузки на объекте 7 и жесткости упругого элемента 19.
Когда сила пружи ны 17 станет больше силы давления жидкости в полости
5на клапан 15, последний закрывается...
При движении объекта 7, штока 6 и поршня 3 вверх, вспомогательной поршень 8 движется вниз. Вертикальная составляющая усилия, действующая на лезвиях призматических ножей 12, при этом препятствует движению поршня 3 вверх. Когда 12 займут горизонтальное положение, вертикальная составляющая усилия на лезвиях.этих ножей становится равной нулю.
При дальнейшем движении объекта 7 вверх вертикальная составляющая усилий на лезвиях ножей 12 способствует движению вспомогательного поршня 8 вниз и основного поршня 3 вверх, аналогично рассмотренному движению объекта 7 вниз.
Если поршень 8 достигает ограни.чительного упора 10, возрастает давление в полости 4 гидроцилиндра, пружина 18 сжимается и клапан 16 открывается. Часть жидкости перетекает из полости 4 гидроцилиндра в полость 5, позволяя объекту 7, штоку 6 и поршню 3 проскользнуть вверх на расстояние, определяемое величиной нагрузки на объекте 7 и жесткостью упругого элемента 19.
При колебаниях вибрирующего объекта 7 и связанного с ним через шток 6 основного поршня 3 происходит колебание вспомогательного поршня 8, призматических ножей 12 и возвратнопоступательное движение ползунков 13 и амортизационных, элементов 14. Расстояние между ограничительными упорами 9 и 10 должно быть больше размаха колебаний вспомогательного поршня 8, соответствующего расчетному размаху колебаний вибрирующего объекта 7. При этом силовая характеристика компенсатора жесткости получается падающей и, если жесткость его по модулю равна жесткости упругого элемента 19, суммарная жесткость подвески равна нулю и колебания объекта 7 не передают.ся защищаемому объекту 1.
Так как площадь основного поршня 3 больше площади вспомогательного поршня 8,то и усилие, представляемое на поршень 3 поршнем 8, больше вертикальной составляющей усилия, возникающего на лезвиях призматических ножей 12. Увеличение модуля жесткости
компенсатора одновременно с этим достигается и увеличенными углами отклонения призматических ножей 12, связанных со вспомогательным поршнем 8, имеющим больший размах колебаний, чем основной поршень 3. Размещение элементов 12, 13 и 14 на основном поршне 3 также способствует увеличению углов отклонения призматически ножей 12 и увеличению компенсирующих свойств устройства в целом, так как относительное перемещение поршней 8 и 3 больше, чем перемещение поршня ;8 относительно гидроцилиндра 2.
При увеличении нагрузки на вибрирующем объекте 7 упругий элемент 19 сжимается-, объект 7, шток 6 и поршень 3 опускается вниз, вспомогательный поршень 8 упирается в ограничительный упор 9. При этом открывается обратный клапан 15, позволяющий проскользнуть вниз объекту 7, штоку 6 и поршню 3. После проскальзывания пружина 17 закрьшает ютапан 15, рабочие элементы 8, 12, 13 и 14 компенсатора жесткости снова оказываются в зоне своих рабочих перемещений, и компенсатор компенсирует жесткость упругого элемента 19 при новой нагрузке на вибрирующем объект 7. При уменьшении нагрузки на вибрирующем объекте перестройка происходит аналогично описанному только поршень 8 упирается в ограничительны упор 10, что приводит к открыванию обратного клапана 16,
Компенсирующий эффект при одинаковых рабочих усилиях на лезвиях призматических ножей у предлагаемого компенсатора жесткости в 25 раз вьш1е, чем у известного устройства, имеющего непосредственную связь призматических ножей с вибрирующим объектом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Компенсатор жесткости | 1986 |
|
SU1411216A1 |
| Шагающий компенсатор жесткости | 1983 |
|
SU1097844A1 |
| Корректор жесткости | 1988 |
|
SU1567821A1 |
| Шагающий корректор жесткости | 1985 |
|
SU1305471A1 |
| Корректор жесткости | 1981 |
|
SU1059321A1 |
| ВИБРОИЗОЛИРУЮЩАЯ ОПОРА | 1993 |
|
RU2076961C1 |
| ВИБРОИЗОЛИРУЮЩАЯ СИСТЕМА | 2011 |
|
RU2481504C2 |
| Компенсатор жесткости | 1983 |
|
SU1113604A1 |
| Подвеска колеса транспортного средства | 1985 |
|
SU1324870A1 |
| Крюковая подвеска | 1987 |
|
SU1481184A1 |
1. КОМПЕНСАТОР ЖЕСТКОСТИ, содержащий призматические ножи, ползунки и амортизационные элементы, кинематически связанные между собой, отличающийся тем, что, с целью увеличения виброизоляции между объектами при одновременном уменьшении нагрузок на лезвиях призматических ножей, он снабжен установленным между объектами гидроамортизатором, в котором установлен дополнительный поршень, связанный с призматическими ножами. 2.Компенсатор жесткости по п. 1, отличающийся тем, что в поршне гидроамортизатора вьтолнено отверстие, в котором установлен дополнительный поршень. 3.Компенсатор жесткости по пп. 1 и2, отличающийся тем, что амортизационные элементы, пол- , g зунки и призматические ножи компенсатора жесткостизакреплены на поршне (Л гидроамортизатора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU297771A1 | |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
