О)
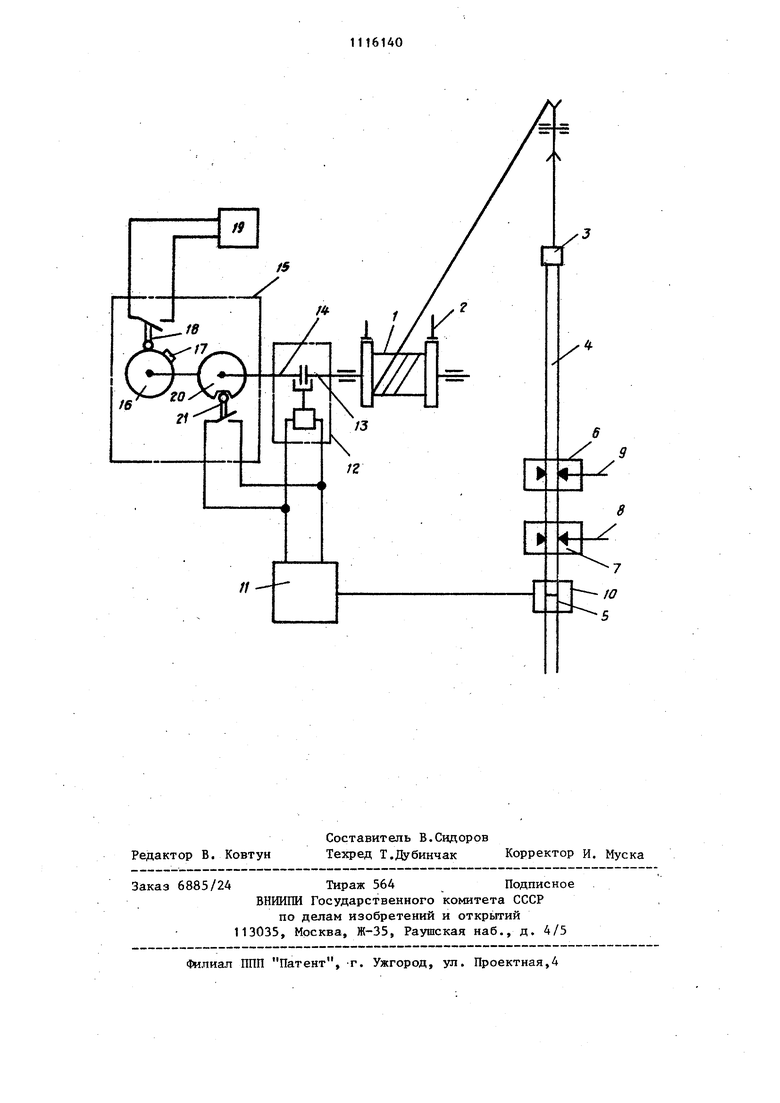
1 .1 Изобретение относится к буровому оборудованию, в частности к устройс вам определения положения резьбовых соединений колонны труб. Известен способ огфеделения поло жения резьб.овых соединений при спус ко-подъеме труб в буровых установках, содержащих подъемный механизм в виде лебедки с тормозным устройст вом, управляемым вручную. Положение резьбового соединения колонны труб относительно рабочих органов (трубо держатель, труборазворот) определяет ся бурильщиком визуально по стыку труб п. Недостатком способа являются значительные потери времени на визуаль ное определение мест резьбового соединения, особенно в случае применени гладкоствольной бурильной колонны. Известно устройство для определения резьбовых соединений колонны труб, содержащее электромагнитный (индукционный) датчик обнаружения резьбового соединения, блок обработки информации датчика с сигнальным узлом, связанным с тормозным устройством подъемного механизма 3 При прохождении диамагнитным коль цом, установленным на замковых (резьбовых) соединениях колонны, электромагнитного датчика блок обработки информации последнего дает сигнал тормозному устройству подъемного механизма на остановку Колонны При этом резьбовое соединение должно находиться между рабочими органами: трубодержателем и труборазворотом. Однако наличие сигнала только о нижнем положении резьбового соединения (в момент прохождения резьбовым соединением датчика) не исключает выход его из зоны рабочих органов вследствие различной субъективной реакции буровиков, управляющих тормозным устройством, и не дает информацию о фактическом положении резьбового соединения бурильной колонны, зажатой в трубодержателе, поэтому возможен захват колонны ра бочини органами ниже резьбового соединения, что приводит к потерям времени на выполнение спуско-подъемных операций. Цель изобретения - повьшение надежности работы и ускорение спускоподъемных операций. 02 Указанная цель достигается тем, что устройство определения положения резьбовых соединений труб, содержащее лебедку, электромагнитный датчик обнаружения резьбовых соединений колонны труб и блок обработки информации датчика, снабжено электромагнитной муфтой, сигнальным узлом с переключателем и датчиком перемещения колонны труб, выполненным в виде вала и двух кулачков,причем электромагнитная муфта расположена между лебедкой и датчиком перемещения колонны труб, а выводы муфты соединены с блоком обработки информации и зашунтированы переключателем, при этом один кулачок датчика перемещения колонны труб взаимодействует с переключателем сигнального узла, а другой - с переключателем, шунтирующим обмотку муфты. На чертеже представлена схема предлагаемого устройства. Устройство, входящее в состав буровой установки, включающей подъемный механизм, выполненный в виде лебедки 1 с тормозным устройством 2 захват 3 колонны 4 труб с резьбовы-, ми соединениями 5 и рабочие органы: труборазворот 6 и трубодержатель 7 с нижней 8 и верхней 9 границами рабочей зоны, содержит электромагнитный датчик 10, блок обработки информации 11 датчика, электромагнитную муфту 12,-соединяющую вал 13 лебедки 1 с осью 14 датчика перемещения 15 колонны 4, на которой расположены кулачок 16 с регулируемым выступом 17, взаимодействующим с переключателем 18 сигнального узла 19, и кулачок 20, взаимодействующий с переключателем 21 блока 1 1 . С помощью электромагнитного датчика 10 формируется первичная информация о месте резьбового соединения, например, путем сравнения вторичных электромагнитных полей двух сосед- них участков трубы. Посредством блока обработки информации 11 датчика 10 обеспечивается питание датчика 10, обработка первичной информации о резьбовом соединении и выработке команды, подаваемой на включение электромагнитной муфты. Датчик 15 перемещения колонны обеспечивает посредством кулачка 16 включение сигнального узла 19 при
311
ходе резьбового соединения в рабоую зону и выключение при выходе из ее, а посредством кулачка 20 тключение электромагнитной муфты ри повороте оси 14 датчика 15 в исходное положение.
Устройство работает следующим образом.
При подъеме колонны 4 лебедкой 1 езьбовое соединение 5 проходит электромагнитный датчик 10. Последний при этом формирует и передает первичную информацию о наличии резьбового соединения в блок обработки нформации 11 датчика, который вырабатывает команду на включение электромагнитной муфты 12. При этом ал 13 подъемного механизма 1 соединяется с осью 14 датчика 15 перемещения колонны 4, кулачки 16 и 20 повоачиваются, переключатель 21 своими контактами шунтирует контакты блока 11, время удержания которых из-за кратковременности сигнала датчика 1П незначительно,обеспечивая необходиую длительность включения муфты 12. При дальнейшем повороте вала 13 подъемного механизма, когда резьбовое соединение достигает нижней 8 границы рабочей зоны труборазворота 6 (выше захвата трубодержателя 7), кулачок 16 выступом 17 замыкает контакты переключателя 18, которые включают сигнальньм узел 19. По сигналу последнего бурильщик тормозным устройством 2 вручную останавливает подъемньй механизм 1.
Если подъем колонны не был прекращен своевременно в пределах рабочей зоны и резьбовое соединение перешло верхнюю границу 9 рабочей зоны (граница захвата труборазворотом 6) кулачок 16, поворачиваясь, размыкает контакты переключателя 18, сигнальный узел 19 отключается. В этом случае колонна должна быть приспущена на такую величину, пока переключатель 18 не включится снова кулачком 16, поворачивающимся в противоположную сторону вместе с подъемным механизмом.
Когда вьтолнено развинчивание резьбового соединения, захватное устройство 3 опускается лебедкой для
04
подъГема очередной свечи. При этом ось 14 датчика 15 перемещения колонны поворачивается в направлении,противоположном подъему, и в исходном
положении кулачок 20 контактами переключателя 21 отключает электромагнитную муфту 12.
Устройство подготовлено для выполнения следующего цикла.
Устройство обеспечивает включение сигнального .узла 19, когда резьбовое соединение 5 труб находится в рабочей зоне между границами 5 и 9, и отключение его при выходе соединения 5
из рабочей зоны, что позволяет получать информацию о фактическом положении резьбового соединения относительно рабочей зоны труборазворота 6, оперативно корректировать это положение до захвата колонны 4 труб трубодержателем 7.
Таким образом, исключаются захваты колонны 4 рабочими органами Ь и 7 когда резьбовое соединение 5 находится вне их рабочей зоны и связанные с этим потери времени на повторное определение места резьбового соединения и ввод его в рабочую зону, определение места резьбового соединения по сравнению с визуальным контролем, особенно в случаях, когда трубы покрыты специальной смазкой, тем самым повышается производительность спуско-подъемных операций колонны бурильных труб и надежность работы при автоматическом управлении тормозным устройством (исключаются отказы при случайных выходах резьбового соединения из рабочей зоны).
Устройство может быть использовано в буровых установках с автоматическим (дистанционным) управлением тормозным устройством подъемного механизма. В этом случае сигнальньй узел подает сигнал в систему управления тормозным устройством на остановку подъемного механизма, тогда когда резьбовое соединение достигло нижней границы рабочей зоны, либо на растормаживание подъемного механизма, когда резьбовое соединение перешло верхнюю границу рабочей зоны.
/5
6
9
8
| название | год | авторы | номер документа |
|---|---|---|---|
| Буровая установка | 1982 |
|
SU1046467A1 |
| Устройство для перемещения свечей бурильных труб | 1980 |
|
SU933936A1 |
| Трубодержатель для муфтовых труб | 1978 |
|
SU735739A1 |
| Податчик бурильных труб | 1982 |
|
SU1035185A1 |
| Устройство для спуска и подъема бурильной колонны | 1973 |
|
SU574517A1 |
| Устройство для спуско-подъемных операций в бурении | 1973 |
|
SU563480A1 |
| СПОСОБ ТЕПЛОВОЙ ОБРАБОТКИ ПРИЗАБОЙНОЙ ЗОНЫ ПЛАСТА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И ЛЕБЕДКА ДЛЯ УСТАНОВКИ УСТРОЙСТВА В ОБСАДНУЮ ТРУБУ | 2005 |
|
RU2304213C1 |
| УСТРОЙСТВО СЕЛЕКТИВНОГО ЗАКАНЧИВАНИЯ СКВАЖИНЫ | 2009 |
|
RU2393327C1 |
| ПРОТИВОСИФОННОЕ ГЕРМЕТИЗИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2558050C1 |
| Установка для глубоководного бурения и способ глубоководного бурения | 2018 |
|
RU2694669C1 |
УСТРОЙСТВО ОГРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РЕЗЬБОВЫХ СОЕДИНЕНИЙ ТРУБ, содержащее лебедку, электромагнитный датчик обнаружения резьбовых соединешгй колонны труб и блок обработки I информации датчика, отличающееся тем, что, с целью повышения надежности работы, оно снабжено электромагнитной муфтой, сигнальным узлом с переключателем и датчиком перемещения колонны труб, выполненным в виде вала и двух кулачков, причем электромагнитная муфта расположена мевду лебедкой и датчиком перемещения колонны труб, а выводы муфты соединены с блоком обработки информации и зашунтированы переключателем, при этом один кулачок датчика перемещения колонны труб взаимодействует с переключателем сигнального § узла, а другой - с переключателем, (Л шунтирующим обмотку муфты.
//
7
10
5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Воздвиженский Б.И., Голубинцев О.Н., Новожилов А.А | |||
| Разведочное бурение | |||
| М., Недра, 1979, с | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| АВТОМАТ ДЛЯ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЙВ БУРЕНИИ | 0 |
|
SU236377A1 |
