Изобретение относится к автоматике и радиотехнике и может быть использовано в различньпс системах автоматического управления и передачи информации, где используются фазоманипулиро-5 ванные сигналы и возможно наличие ,узкополосных помех с частотами, близ. кими к частоте полезного сигнала.
Швестен способ компенсации влияния помехи, согласно которому по- tO лезный сигнал выделяют из смеси с помехой посредством фильтрации 1J .
Однако для реализации способа необходимо точно знать частоту полезного сигнала, что не .всегда возможно. 15 С другой стороны, вьщеление сигнала из аддитивной смеси с помехой, если часлоты их достаточно близкиу представляет собой не всегда разрешимую техническую задачу, 20
Наиболее близким по технической сущности к предложенному является способ компенсадир) влияния помехи на постоянную составляющую сигнала, основанный на ограничении входного 25 сигнала, вычитании из входного сигнала ограниченного входного сигнала и накоплении разности. Одновременно с накоплениемразностного сигнала производят его суммирование с зо дополнительным постоянным сигналом соответствующей полярности. Суммирование прекращают в тот момент, когда ранее накопленньй сигнал равен проинтегрированному разностному сигналу ,
, Недостаток известного способа состоит, в том, что ограничен диапазон возмо:киого изменения как помехи, так и полезного сигнала. Например, при изменении (увеличении частоты или уменьшении амплитуды) помехи, начиная с момента, времени выхода принимаемого сигнала из зоны ограничения, величина .второго проинтегрированного сигнала ранее накопленного 5 первого про.интегрированного сигнала. К моменту очередного подрезания принимаемого сигнала мояет оказаться, что сравниваемые проинтегрированные сигналгз не равны один другому 50 При KPjfCAOM подрезании принимаемого сигнала это отличие между проинтегрированными сигналами все больше и больше увеличивается. Суммирование дополнительного постоянного сиг- 55 нала никогда не прекращается. Этот j недостаток объясняется тем, что величина накопленного проинтегрированного
сигнала в процессе компенсации не уменьш:ается. Только на заключит ьном этапа гсомпенсации, когда два проинтецриро.заннык:Сигнала равны между собой, возмолсен скачкообразньш сброс (обнуление) накопленного сигнала. Это накладывает ограничение на величину .возможной ограниченной части принимаемого с.игнала, которая определяется параметрами помехи. Площаль ограниченной части принимаемого сигнала не должна превьппать и даже быть равно площади линейного участка изменения принимаемого сигнала.
Для ограничения на диапазон изменения полезного сигнала при известном способе для получения пололсительного эффекта необходимо ненулевое среднее значение полезного сигнала. Если же полезный сигнал имеет нулевое среднее значение, например несущая радиосигнала, то сформированные компенсирующие сигналы для , разнополярной полуволны несущей компенсируют (уничтожают) один другой. В результате этого среднее значение не изменяемся.
Таким образом, извеси ный способ . обладает недостаточной точностью компенсации влияния помехи на постоянную составляющую сигнала, не учитываются особенности обработки сигнала при его фазовой манипуляции.
Цель изобретения - П01зьш1ение точности компенсации при приеме фазоманипулирован.ного сигнгша с изменяющейся амплитудой и частотой.
Поставхгенная цель достигается тем, что при способе компенсации влияния помехи на постоянную составляющую сигнала, основанном на ограничении входного сигнала, вычитании из входного сигнала ограниченного .входного сигнала и накоплении их разности, при превышении накапливаемой разностью заданного порогового уровня ограниченный входной сигнал заменяют сигналом с уровнем, равным уровню ограничения, и производят накопление до равенства нулю накапливаемой разности, причем накопление осул ествляют на интервале менькгем i я от ожидаемого момента манипуляции фазы сигнала, где F несущая частота сигнала.
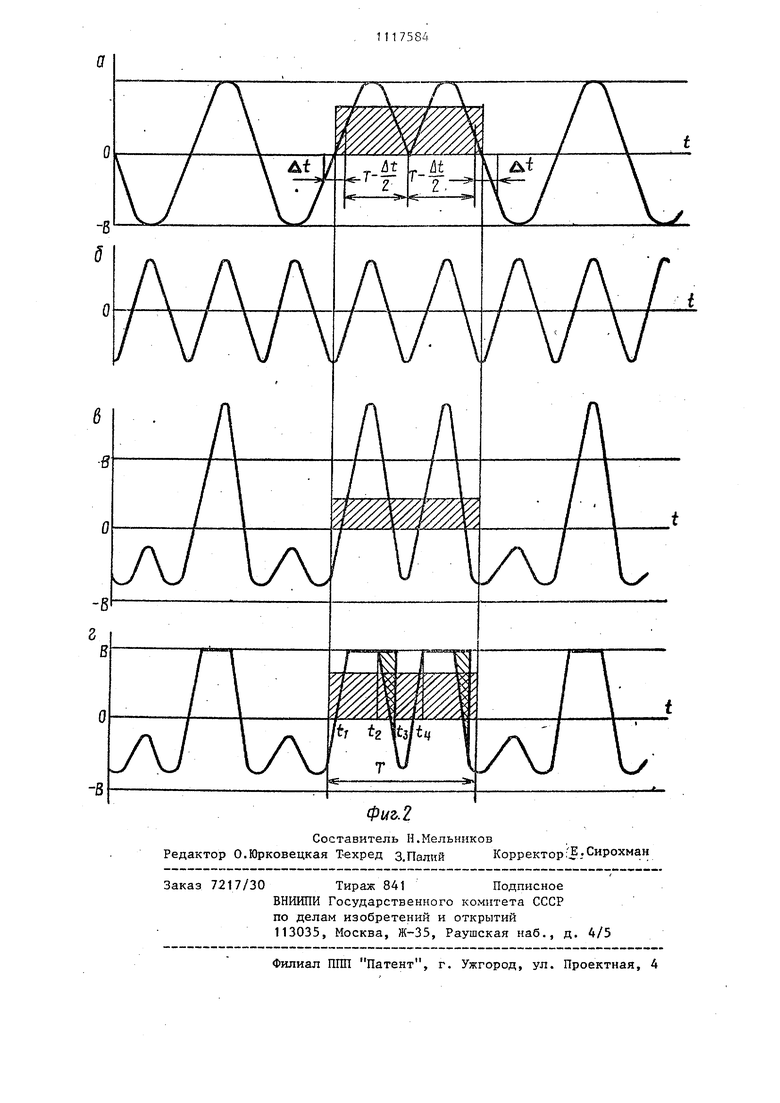
На фиг.1 представлен пример устройства для осуществления предлагаемого способа; на фиг.2 - эпюры напряжений, поясняющие предложенный способ.
Устройство содержит ограничитель 1 полосовой фил.ьтр 2, накопитель 3 на входа, поляризованное реле 4, переключатель 5, ключ 6 и тактовый генератор 7.
Устройство работает следующим образом.
Принимаемый сигнал, содержащий помеху, поступает через полосовой фильтр 2 на вход ограничителя 1 и на один вход накопителя 3, другой вхо которого соединен с выходом ограничителя 1. К выходу накопителя 3 подключено поляризованное реле 4, управляющее переключателем 5, контакты с нейтральным положением которого включены между входом ограничителя 1 и разнополярньми клеммами источника постоянного тока (не показан) . В цепи обратной связи накопителя 3 включен ключ 6, управляемый тактовым генератором 7. Уровень ограничения ограничителя 1 и напряжение источника постоянного тока равны между собой и установлены (выбраны) с учетом зоны ограйичения ограничителей приемника информации (не показаны).
Полагаем, что зона, ограничения задана постоянной величиной iB(фиг.2 а) Полезный фазоманипулированный сигнал (фиг,2а) не ограничивается, не подрезается. При строго линейном приемном тракте влияние помех на достоверность приема дискретных сообщений отсутствует, и компенсировать влияние помех нет 1еобходимости.
Среднее значение несущей в период изменения ее фазы равно площади заштрихованного прямоугольника на фиг.2а. В другие периоды изменения несущей ее среднее значение равно нулю.
На фиг.2а показано всего два злемента дискретного кода, которые могут соответствовать сообщению О или 1
Помеху, параметры которой близки к параметрам несущей (фиг.26), практически невозможно отфильтровать(отселектировать).
При наложении помехи на несущую формируется сзгммарный принимаемый сигнал (фиг.2ь). За счет действия амплитудных ограничителей верхушки суммарного сигнала подрезаются. Это приводит к тому, что среднее значение суммарного сигнала на выходе ограничителя 1 уменьшается и
значение, равное площади заштрихованноге прямоугольника на фиг.2в.
Если принимаемый сигнал не подрезаетс51, то выходной сигнал ограничителя 1 равен его входному сигналу. Вслествие инвертирующих свойств ограниггйтеля 1 его входной и выходной сигналы при суммировании на входах накопителя 3 компенсируют один другой. Сигнал на выходе накопителя равен нулю,- Поляризованное реле 4 не сраба- , тывает. Дополнительный сигнал от источника постоянного тока на -вход ограничителя 1 не поступает. Компенсация влияния помехи отсутствует, так как в линейном режиме работы ее влия ние отсутствует.
Если принимаемый сигнал (фиг.2в) начинает ограничиваться, то его ограниченные (подрезанные) части формируются на входе накопителя 3 и накаплваются 33 накопителе 3. Срабатывает в соответствии с полярностью выходногосигнала шкопителя 3 поляризован.ное реле 4, которое с помощью переключателя 5 отключает вход огра ичителя 1 от выхода полосового фштьтра 2 и подключает .клемму + (тти -) источника постоянного тока. Полярность ВЫХОДНОГО сигнала полоёового ф1тьтра2 и источника постоянного тока совпадаю
Накопитель 3 включается в работу и выключается с помощью ключа 6, контакты Koioporo включены в жесткую отрицательную обратную связь накопителя 3. Управление работой ключа 6 осуществляется с помощью тактового генератора 7, KOTopbriJ вырабатывает импульсы в такт предполагаемого изменения фазы несуакй для каждого элемента дискретного кода. Интервалы времени /si,, в течение которых включается и выключается ключ 6 под действием тактовых импульсов от тактового генератора 7, показаны на фиг.2в. -Изменение фазы несущей ос тцествляется в моменты изменения элементов единичного двоичного кода передаваемого сообщения, длительности которых равны.
После того, как суммарньш принимае мый сигншт па выходе полосового фш1ьтра 2 (фиг.2г) выходит из зоны ограничения, выходной сигнал ограничителя 1 пo-пpeлa e fs остается на уровне ограничения, так как на его вход поступает дополнительный сигнал от источника постоянного тока, наппяжение которого равно уровню ограничения ограничителя 1. На входе накопителя 3 формируется разностный сиг нал уже другого знака. Ранее накопленный сигнал в накопителе 3 уменьшаетсяВ момент, когда накопленный сигнал - заряд - становится равньй нулю, поляризованное реле 4 возвращается в исходное состояние. Переключатель 5 отключает клемму + (или -) источника постоянного тока от входа ограничителя 1 и подключает выход полосового фильтра 2 к входу ограничителя 1. Так как в линейном режиме работы ограничителя 1 его входной и выходной сигна лы равны, то и на входе накопителя формируется нулевой разностный сигнал. Поляризованное реле 4 не сраба тывает, В период изменения фазы несущей к моменту очередного ограничения су марного принимаемого сигнала накопл ный сигнал уменьшается до нуля, либ до малой величины. При зтом,возможная ошибка компенсации из-за неполноты разряда накопителя при изменении параметров помехи уменьшается, что позволяет расширить диапазон компенсации влияния этой помехи. За счет дополнительного суммирова(ния постоянного сигнала увеличивается время нахождения ограничителя 1 в состоянии насьш ения, что позволяет восстановить среднее значение выходного сигнала ограничителя 1. На фиг.2г показано, что площадь заштрихованного прямоугольника равна площади заштрихованного прямоугольника, изображенного на фиг.2а. Это свидетельствует об успешной компенсации отрицательного влияния преднамеренной помехи, параметры которой близки к параметрам несущей полезного сигнала. Таким образом, расширяется диапазон точной компенсации отрицательного влияния помехи при приеме фазоманипулированного сигнала при изменении амплитуды или частоты сигнала.
СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ПОМЕХИ НА ПОСТОЯННУЮ СОСТАВЛЯЮЩУЮ СИГНАЛА, основанный на ограничении входного сигнала, вычитании из входного сигнала ограниченного входного сигнала и накоплении их разности, отличающийся тем, что, с целью повышения точности компенсации при приеме фазоманипулированного сигнала с изменяющейся амплитудой и частотой,, при превьппении накапливаемой разностью заданного порогового уровня ограниченный входной сигнал заменяют сигналом с уровнем, равным уровню ограничения, и производят накопление до равенства нулю накапливаемой разности, причег накопление осуществляют на интервале, меньшем - - от ожидаемого Момента манипуляции фазы сигнала, где F - несущая с $ частота сигнала.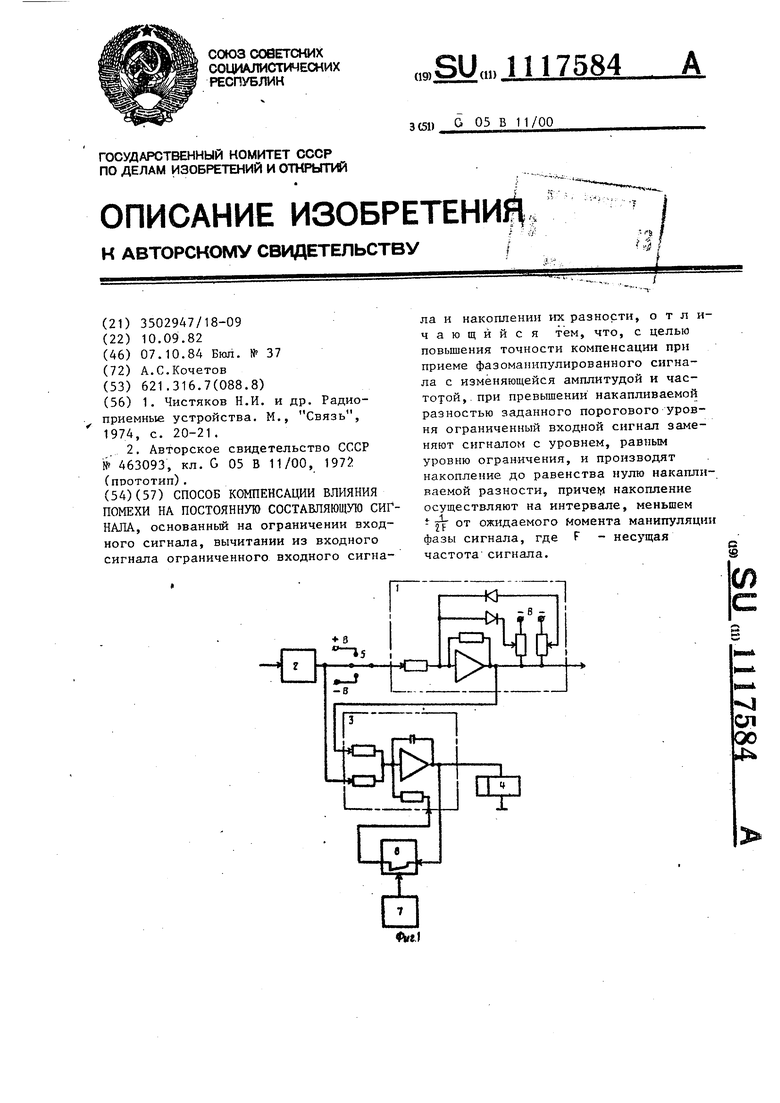
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Чистяков Н.И | |||
| и др | |||
| Радиоприемные устройства | |||
| М., Связь, 1974, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ компенсации влияния помех во входном сигнале | 1972 |
|
SU463093A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
