1
Изобретение относится к нелинейным системам автоматического управления и может быть использовано для улучшения их динамических свойств.
Известны способы компенсации влияния помех на динамические свойства нелинейных систем путем сравнения входного сигнала с сигналом, пропорциональным величине заданного ограничения его, интегрирования полученного разностного сигнала в период ограничения, запоминания проинтегрированного сигнала и суммирования его с входным сигналом при выходе входного сигнала из зоны ограничения.
Однако при использовании таких способов величина запомненного проинтегрированного разностного сигнала не зависит от параметров помехи во время его суммирования с входным сигналол, что снижает точность компенсации. Целью изобретения является повышение точности компенсации при изменении параметр01з помехи.
Это достигается тем, что при выходе входного сигнала из зоны ограничения интегрируют разностный сигнал, сравнивают запомненный сигнал с вторым проинтегрированным и при их равенстве прекращают суммирование запомненного сигнала с входным.
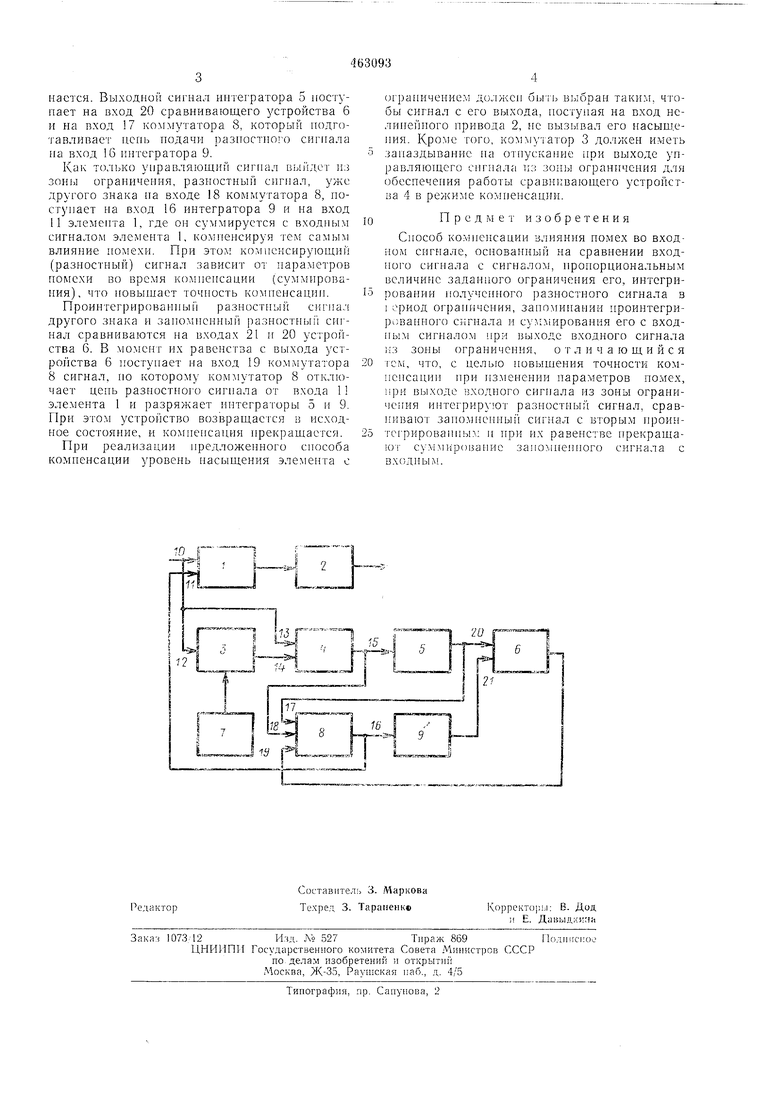
Блок-схема устройства для реализации предлагаемого способа приведена на чертеже.
Выход элемента 1 с ограничением подключен ко входу нелинейного привода 2. Коммутатор 3 соединен с сравниваюшим устройством 4, которое через интегратор 5 связано с другим сравнивающим устройством 6, и с источником постоянного тока 7. Коммутатор 8 соединен с интегратором 9. Входы 10 и 11 элемента 1 подключены ко входу 12 коммутатора 3, ко входу 13 сравнивающего устройства 4 и к выходу коммутатора 8 соответственно. Вход 14 ycTpoiicTBa 4 соединен с выходом коммутатора 3, а выход - со входом 15 интегратора 5. Вход 16 интегратора 9 имеет связь с выходом коммутатора 8, входы 17-19 которого подключены к соответствующим выходам интегратора 5 п сравнивающих устройств 4 II 6. Входы 20 II 21 устройства 6 соединены с выходами интеграторов 5 и 9 соответственно.
Управляющий сигнал, состоящий из полезного сигнала и помехи, поступает на вход 10 элемента 1, на вход 12 ком: утатора 3 н на вход 13 устройства 4.
При достнженни управляющим сигналом уровня ограничения (за счет амплитуды помехи) ерабатывает коммутатор 3, который включает в работу устройство 4. С выхода устройства 4 разностный сигнал одного знака ностунает на вход 18 коммутатора 8 п на вход 15 интегратора 5, где он интегрируется и запоминается. Выходной сигнал интегратора 5 поступает на вход 20 сравнивающего устройства 6 и на вход 17 кo r yтaтopa 8, который подго1авливает цепь нодачи разностного сигнала на вход 16 интегратора 9.
Как только управляющий сигнал выйдет из зоны ограничения, разностный сигнал, уже другого знака на входе 18 коммутатора 8, иостуиает иа вход 16 интегратора 9 и на вход 11 элемента 1, где он суммируется с входным сигналом элемента 1, компенсируя тем самым влияние нолехи. При этом компенсирующий (разностный) сигнал зависит от параметров нолгехи во время компеисации (суммирования), что повышает точность компенсации.
Проинтегрированный разностный сигнал другого знака и заиомненный разностный сигнал сравниваются на входах 21 п 20 устройства 6, В момент их равенства с выхода устройства 6 поступает на вход 19 комл1утатора 8 сигнал, ио которому коммутатор 8 отключает цепь разностного сигнала от входа 1 элемента 1 и разряжает интеграторы 5 и 9. При этом устройство возвращается в исходное состояние, и комнеисация прекращается.
При реализации предложенного способа компенсации уровень иасыщения элемента с
ограничением должен оыть выоран таким, чтобы сигнал с его выхода, поступая на вход нелинейного привода 2, не вызывал его насыа ения. Кроме того, коммутатор 3 должен иметь запаздывание иа отпускание при выходе управляющего спгпалс1 113 зоны ограничения для обеспечения работы сравнивающего устройства 4 в компенсации.
Предмет изобретения
Способ ко 1пенсации влияния помех во входном сигнале, основанный на сравнении входного сигнала с сигналом, нронорциональным величине заданного ограничения его, интегрнровании получеииого разностного сигнала в i ориод ограиичеиия, запоминании проинтегрированного сигнала п cyм iиpoвaння его с входным сигналом при выходе входного сигнала 1з зоны ограничения, о т л и чающийся
тем, что, с целью повышения точности компеисации прн изменении параметров помех, при выходе входного сигиала из зоны ограиичепия нптегриру от разпостиый сигнал, сравнивают запо.мпенньп сигнал с вторым нрои 1тегрироваппым и при их равенстве прекращают cyMMHpouainie запомие пюго сигнала с входным.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ компенсации влияния помех на динамические свойства автоматических систем с ограничением | 1974 |
|
SU540255A1 |
| Устройство для компенсацииОгРАНичЕНия | 1974 |
|
SU809043A1 |
| Способ компенсации влияния помехи на постоянную составляющую сигнала | 1982 |
|
SU1117584A1 |
| Способ аналого-цифрового преобразования мгновенного значения повторяющегося сигнала | 1980 |
|
SU884128A1 |
| Нелинейное корректирующее устройство для динамических систем с ограничением | 1975 |
|
SU603949A1 |
| Нелинейное корректирующее устройство | 1980 |
|
SU951231A1 |
| Способ подавления помех вупРАВляющЕМ СигНАлЕ | 1978 |
|
SU809044A1 |
| Фотореле | 1989 |
|
SU1653021A2 |
| Устройство для компенсации помех | 1975 |
|
SU565279A2 |
| Компаратор формы сигналов | 1985 |
|
SU1257604A1 |
