1 Изобретение относится к измерительной технике и может быть использовано для измерения параметров комплексных сопротивлений. Известен автоматический мост переменного тока, в котором уравновешивание производится способом регулирующих и модуляционных воздействий на измерительную цепь с временной селекцией данных воздействий 1 3« Недостатком такого моста является низкое быстродействие вследствие разнесения во времени регулирующих и модуляционных воздействий. Наиболее близким по технической сущности к предлагаемому является цифровой мост переменного тока с совмещением регулирующих и модуляционных воздействий, содержащий последовательно соединенные генератор, мостовую измерительную цепь, экстремум-детектор, первая и вторая группы выходов которого соединены с соответствующими каналами уравновешивания, счетчик алгоритма и тактовый генератор, который подключен к второму входу экстремум-детектора, который первыми выходами групп выхо дов соединен с входами счетчика алг ритма, каждый из идентичных каналов уравновешивания состоит из блока ключей, последовательно соединенных блока связи, распределителя импульсов, реверсивного счетчика и блока индикации, а также из триггера реверса и счетчика квазимодулятора,ко торый первым и вторым входами соеди нен с соответствующими выходами соответствующей группы выходов экстремум-детектора, а первым входом - также с входом триггера ревер са, выход которого подключен к второму входу реверсивного счетчика и третьему входу счетчика квазимодуля тора, к второму входу и выходу кото рого подключены соответственно вход блока связи, второй вход распредели теля импульсов соединен с выходом счетчика алгоритма, а выход блока ключей подключен к мостовой измерительной цепи, модулятор, модулягмон ный делитель и модулядаонную меруС2 Недостатками устройства явл зт-ся сложность конструкции, поскопьку для реализации квазимодулятора требуется набор модуляционных :ер, обладающих значительными габа1 тами 32 ,и весом, сложен по структуре модуля1ЩОННЫЙ делитель и модулятор, низкая технологичность вследствие больших габаритов модуляционных мер и других элементов квазимодулятора, устанавливаемых отдельно в приборе, низкая точность уравновешивания, так как аналоговое суммирование рабочего и модуляционного воздействий вносит дополнительную погрешность в результирующее воздействие, вызванную погрешностями модуляционных мер. Цель изобретения - упрощение конструкции устройства, повьшхение технологичности и точности измерений. Поставленная цель достигается тем, ч го .в квазимодуляционный автоматический мост переменного тока, содержащий последовательно соединенные генератор, мостовую измерительнзто цепь, экстремум-детектор, . счетчик алгоритма и тактовый генератор, который подключен к второму входу экстремум-детектора, который первыми выходами групп выходов соединен с входами счетчика алгоритма, каждьй из идентичных каналов уравновешивания состоит из блока ключей, последовательно соединенных блока связи, распределителя импульсов,реверсивного счетчика и блока индикации, а также из. триггера реверса и счетчика квазимодулятора, которьй первым и вторым входами соединен с соответствующими выходами соответствующей группы выходов экстрёмум-детектора, а первым входом - также с входом триггера реверса, выход которого подключен к второму входу реверсивного счетчика и третьему входу счетчика квазимодулятора, к второму входу и выходу которого подключены соответственно входы блока связи, второй вход распределителя импульсов соединен с выходом счетчика алгоритма, а выход блока ключей подключен к мостовой измерительной цепи, а каждый канал уравновешивания введены сумматор и дешифратор, причем первый вход сумматора соединен с выходом реверсивного счетчика, а второй вход с выходом дешифратора, который входами подключен соответственно к выходам счетчика квазимодулятора и
счетчика алгоритма, выход суммагора соединен с входом блока ключей.
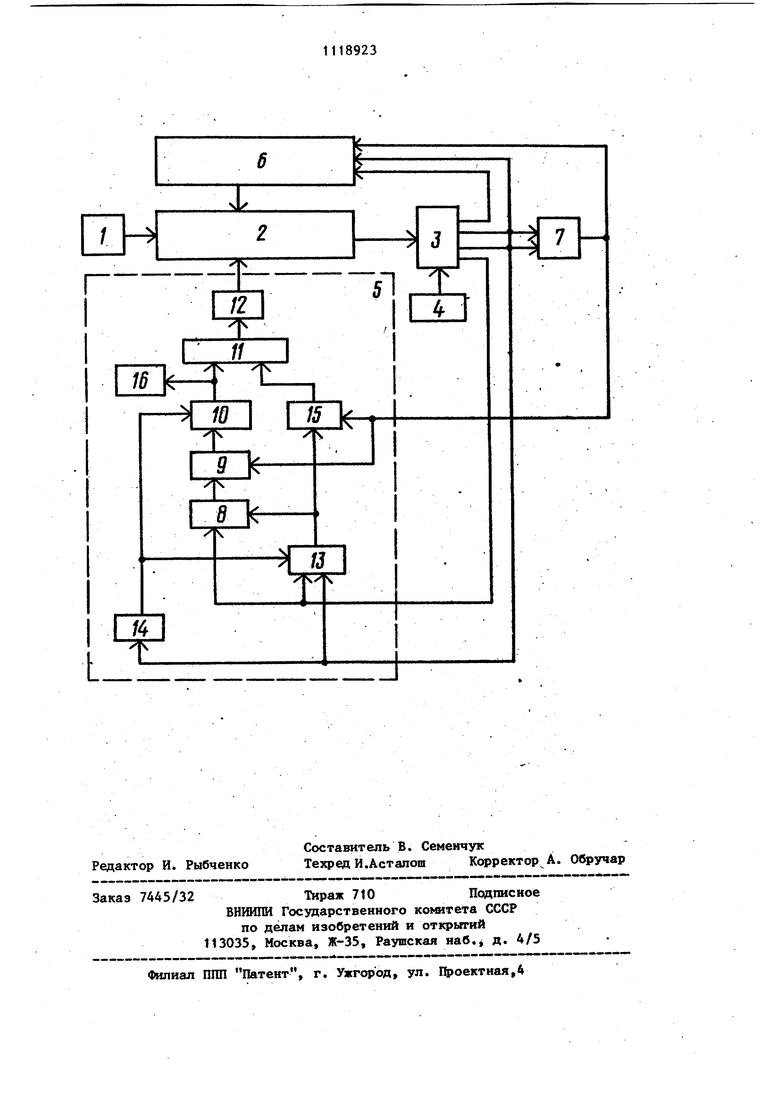
На чертеже приведена блок-схема квазимодуляционного автоматического моста переменного тока.
Устройство содержит генератор 1, мостовую измерительную цепь 2, экстремум-детектор 3, к второму входу которого подключен тактовый генератор 4. Выходы перзвой и второй групп выходов экстремзт -детектора 3 соединены соответственно с входами первого и второго идентичных каналов 5 и 6 уравновешивания,а первые выходы групп выходов экстремум-детектора 3 Соединены с входами счетчика 7 алгоритма.
Каждый канал уравновешивания (например 5) состоит из последовательно соединенньпс блока 8 связи, распределителя 9 импульсов, реверсивного счетчика 10, сумматора 11, блока 12 ключей, а также из счетчика 13 квазимодулятора, триггера 14 реверса, дешифратора 15 и блока 16 индикации, причем первьпй и второй входы счетчика 13 квазимодулятора соединены с соответствующими выходами соответствующей группы выходов зкстремум-детектора 3, а первый вход также соединен с входом триггера 14 реверса, выход которого соединен с вторым входом реверсивного счетчика 10 и тр-етьим входом счетчик 13 квазимодулятора, к второму входу и выходу которого подключены соответствуюпще входы блока 8 связи, а к выходу также подключен и вход дешифратора 15, второй вход которого и второй вход распределителя 9 импуль- сов соединены с выходом счетчика 7 алгоритма, выход дешифратора 15 подключен к второму входу сумматора 11, к первому входу которого подключен вход блока 16 индикации, выход блока 12 ключей подключен к мостовой измерительной цепи 2.
Уравновешивание устройства осуществляется следующим образом.
Регулирующее воздействие на мостовую измерительную цепь осуществляется крммзггацией секций регулируемых плеч мостовой измерительной цепи 2 посредством блоков 12 ключей. Рассмотрим работу одного канала 5 уравновешивания, поскольку работа канала 6 аналогична.
Блок 12 ключей заправляется выходным кодом сумматора 11. Данный код однозначно связан с кодом реверсивного счетчика 10 и счетчика 13 квазимодулятора. Код реверсивного счетчика 10 поступает ia вход сумматора 11 непосредственно. Счетчик 13 квазимодулятора представляет собой счетчик с тремя состояниями, кодируемыми как (-1); Oj (+1) квазимодулятора. Переход из состояния (+ в (-1) и наоборот возможны только ч.ерез состояние О, которое устанавливается путем подачи импульса на первый вход счетчика 13 квазимодулятора. Соответственно указанным состоянием дешифратор 15 формирует на своем выходе дополнительный код нули, прямой код одного шага уравновешивания, которыми ведется урав новешивание в данный момент, что определяется состоянием счетчика 7 алгоритма. Выход депмфратора 15 подключен к второму входу сумматора 11, на выходе которого возможны комбинации: Р-1 (mar)j Pj +1(ш 1где Р - код реверсивного счетчика :10 (прибавление к коду Р дополнительного кода единицы шага уравновешивания равнозначно вычитанию из Р единищ.1). Таким образом, регулирующее воздействие на мостовую измерительную цепь 2 в каждом такте уравновешивания определяется суммо рабочего и модуляционного воздействий.
Пусть в результате очередного шага уравновешивания экстремум-детектор 3 зафиксировал отрицательное приращение выходного сигнала мостовой измерительной цепи 2. При этом на его втором выходе в первой группе выходов формируется импульс, поступающий на входы счетчика 13 квазимодулятора и блока 8 связи. Если счетчик 13 квазимодулятора бьт в состоянии О, он переводится в одно из крайних состояний., что определяется состоянием триггера 14 реверса. Если же счетчик 13 квазимодулятора бьш в крайнем состоянии, тогда импульс экстремум-детектора 3 через блок 8 связи поступает на реверсивный счетчик 10 и производит изменение числя в нем на единицу шага уравновешивания. Величину шага формирует 1 аспределитель 9 импульса на основании состояния счетчика 7 алгоритма путем посьшки данного импульса на входы определенных групп разрядов (например, декад) реверсивного счетчика 10. Таким образом, во время уравновешивания воздействие на мостовую измерительную цепь определяется суммой рабочего и модуляционного воздействий без их временной селекции. Положительное приращение сигнала мостовой измерительной цепи 2 в результате очередного шага уравновешивания (за исключением первого) сигнализирует о переходе через точку равновесия на один шаг в данном направлении. Экстремум-детектор 3 формирует импульс на первом выходе первой группы выходов, который устанавливает счетчик 13 квазимодулятора в нулевое состояние и опрокидывает триггер 14 реверса. При этом регулирующее воздействие на мостовую измерительную цепь 2 определяется кодом реверсивного счетчика 10, который соответствует равновесному значению по данной группе разрядов. При дальнейших шагах по данному параметру . Происходит суммирование полученного равновесного значения с модуляционным при этам состояние реверсивного счет чика 10 не изменяется, чемдостигается устойчивость отсчета параметра Исключение составляет положительное приращение в результате первого шага 35
уравновешивания на группе разрядов 1
модулятора и модуляционных мер. 3, реверсивного счетчика 10. Счетчик 7 алгоритма блокирует фиксацию равновесия по данной группе разрядов в течение нескольких первых тактов уравновешивания. Тогда после первого шага происходит опрокидьюание триггера реверса и последуюпще шаги осуществляются в сторону равновесия. После фиксации равновесия по обоим параметрам, которые регулируютйя поочередно, счетчик алгоритма переключается в следующее состояние и производится уравновешивание по младшей группе разрядов реверсивного счетчи ка 10. Работа каналов уравновешивания тактируется тактовым генератором 4. Таким образом, упрощение конструкции устройства достигается путем синтеза квазимодулятора на дискретных элементах, которые легко реализуются интегральными схемами, что позволяет также повысить технологичность устройства. В данном устройстве каналы уравновешивания содержат только цифровые элементы, что позволяет реализовать их при помощи микропроцессора, тем самым снижая аппаратурные затраты и повышая надежность прибора. Данное устройство обладает более высокой точностью уравновешивания,поскольку отсутствуют дополнительные погрешности, обусловленные погрешностями
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический мост переменного тока | 1984 |
|
SU1213423A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока и устройство для его осуществления | 1986 |
|
SU1418626A1 |
| Цифровой экстремальный мост переменного тока | 1987 |
|
SU1479882A1 |
| Способ уравновешивания цифровых модуляционных экстремальных мостов переменного тока и устройство для его осуществления | 1985 |
|
SU1312490A1 |
| Цифровой экстремальный мост переменногоТОКА C пОдЕКАдНО-СлЕдящиМ уРАВНОВЕшиВА-НиЕМ | 1979 |
|
SU836596A1 |
| Цифровой модуляционный экстремальный мост переменного тока | 1974 |
|
SU708241A1 |
| Способ уравновешивания цифровых автоматических экстремальных мостов переменного тока и устройство для его осуществления | 1983 |
|
SU1150553A1 |
| Способ уравновешивания цифровых автоматических экстремальных мостов переменного тока | 1982 |
|
SU1026063A1 |
| СПОСОБ УРАВНОВЕШИВАНИЯ МОДУЛЯЦИОННЫХ ЭКСТРЕМАЛЬНЫХ МОСТОВ ПЕРЕМЕННОГО ТОКА | 1971 |
|
SU313163A1 |
| Цифровой автоматический мост | 1979 |
|
SU873136A1 |
КВАЗИМОДУЛЯЦИОННЫЙ АВТОМАТИЧЕСКИЙ МОСТ ПЕРЕМЕННОГО ТОКА,содержащий последовательно соединенные генератор, мостовую измерительную цепь, экстремум-детектор, счетчик алгоритма и тактовый генератор, который подключен к второму входу экстремум-детектора, который первыми выходами групп выходов соединен с входами счетчика алгоритма, каждый из идентичных каналов уравновешива ния состоит из блока ключей, последовательно соединенных блока связи, . распределителя импуйьсов, реверсивного счетчика и блока индикации, а также из триггера реверса счетчика квазимодулятора, который первым и вторым входами соединен с соответствующими выходами соответствукицей выходов экстремум-детектора, а первым входом - та:кже с входом триггера реверса, выход которого подключен к второму входу реверсивного счетчика и третьему входу счетчика квазимодулятора, к второму входу и выходу которого подключены соответственно входы .блока связи, второй вход распределителя Импульсов соединен с выходом счетчика алгоритма, а выход блока ключе:й подключен к мостовой измерительной цепи, отличающийся тем, что, с целью упрощения конструкции устройства, повьшения технологичности и точности измерений, р каждый из каналов уравновешивания введены сзгмматор и дешифратор, причем первый вход сумматора соединен с выходом реверсивного счетчика, а второй вход - с выходом дешифратора, который входами подключен соответственно к выходам счетчика ks9 квазимодупятора и счетчика алгоритма, выход сумматора соединен с входом блока ключей.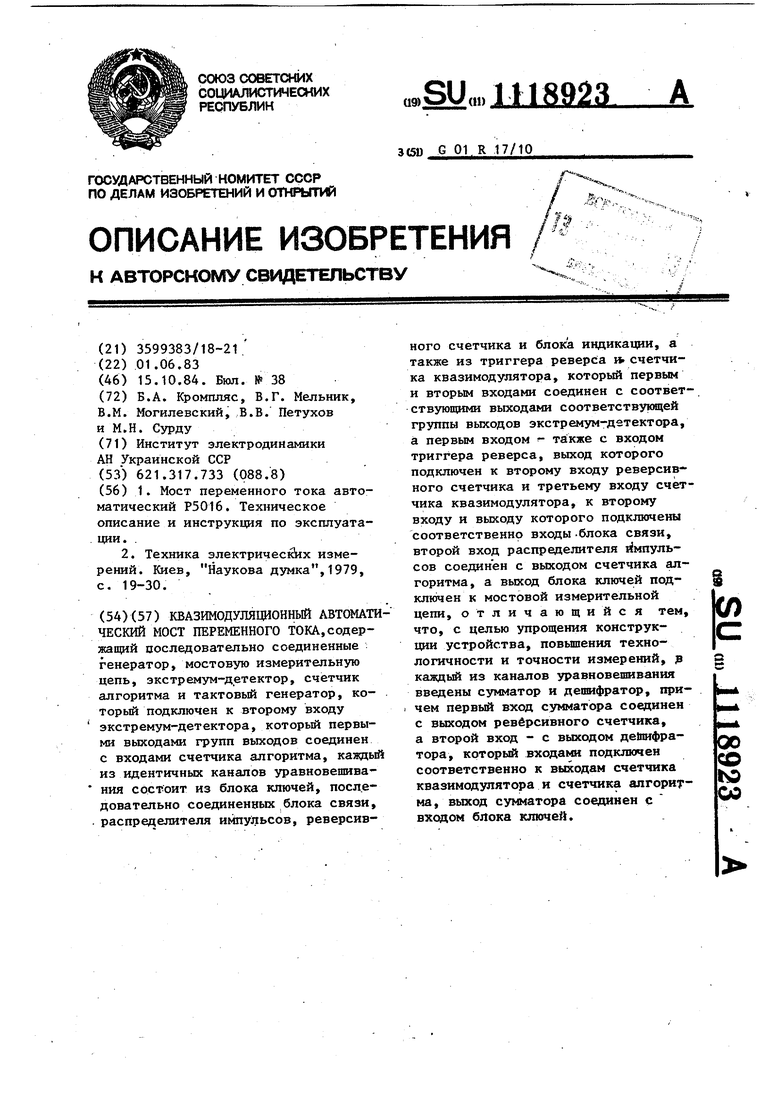
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Горизонтальный ветряной двигатель | 1926 |
|
SU5016A1 |
| Техническое описание и инструкция по эксплуатации | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Техника электрических измерений | |||
| Киев, Наукова думка,1979, с | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
