2. Способ по п.1,отличающий с я тем, что, япределение частного минимума амплитуды выходного напряжения мостовой измерительной цепи и переход на уравновешивание по следующей декаде (тетраде) или
по другому параметру производят не- посре ственно после выполнения одинарного, а также двойного возвратного шага, если перед ним было сформировано хотя бы одно отрицательное импульсное регулирующее воздействие.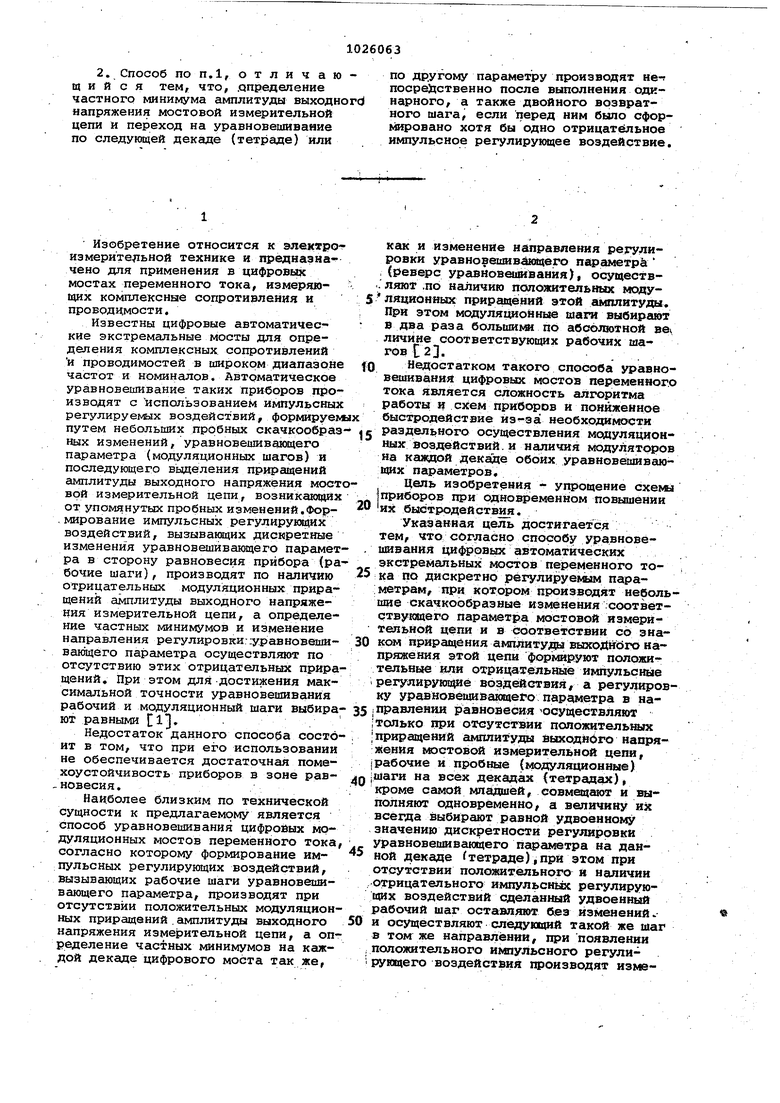


1. СПОСОБ УРАВНОВЕШИВАНИЯ ЦИФРОВЫХ АВТОМАТИЧЕСКИХ ЭКСТРЕМАЛЬ- НЫХ МОСТОВ ПЕРЕМЕННОГО ТОКА по дискретно регулируемым параметрам, при котором .производят небольшие скачкообразные изменения соответствующего параметра мостовой измерительной цепи и в соответствии со знаком приращения амплитуды выходного напряжения этой цепи формируют положительные и отрицательные импульсные.регулирукидие воздействия, а регулировку уравновешивающего параметра в направ лении равновесия осуществляют только при отсутствии положительных приращений амплитуды выходного напряжения мостовой измерительной цепи, о т л и ч а ю щ и и с я тем, что, с целью упрощения схемы приборов при одновременном повышении их быстродействия, рабочие и пробные (модуляционные) шаги на всех декадах (тетрадах), кроме самой младшей, совмещают и выполняют одновременно, а величину их всегда выбирают равной удвоенному значению дискретности регулировки уравновешивающего параметра на данной декаде (тетраде), при этом при отсутствии положительного и наличии отрицательного импульсных регулирующих воздействий сделанный удвоенный рабочий шаг оставляютбез изменений и осуществляют следуюгч.ий такой же шаг в том же направлении, при появлении положительного импульсного регулирующего воздействия производят | изменение направления регулировки урав новешивающего параметра и делают один возвратный шаг, равный удвоенному значению дискретности регулировки этого параметра на данной декаде . (тетраде), при исчезновении отрица тельного и отсутствии положительного импульсных регулируюц(их воздействий также производят изменение направления регулировки уравновешивающего параметра, а возвратный шаг выбирают равным единичному значению дискретности регулировки этого параметра на данной тетраде (декаде).
Изобретение относится к электро- измерительной технике и предназначено для применения в цифровых мостах переменного тока, измеряющих комплексные сопротиэления и проводимости. Известны цифровые автоматические экстремальные мосты для определения комплексных сопротивлений и проводимостей в ияроком диапазоне частот и номиналов. Автоматическое уравновешивание таких приборов производят с использованием импульсных регулируемых воздействий, формируегл путем небольших пробных скачкообраз ных изменений, уравновешивающего параметра (модуляционных шагов) и последующего выделения приращений амплитуды выходного напряжения мост вой измерительной цепи, возникакядйх от упомянутых пробных изменений.Фор. мирование импульсных регулирующих воздействий, вызывающих дискретные изменения уравновешйваннцего парамет ра в сторону равновесия прибора (ра бочие шаги), производят по наличию отрицательных модуляционных приращений амплитуды выходного напряжения измерительной цепи, а определение частных минимумов и изменение направления регулировкичуравновешиваквдего параметра осуществляют по отсутствию этих отрицательных прира щений. При этом для достижения максимальной точности уравновешивания рабочий и модуляционный шаги выбира ют равными 1. Недостаток дачного способа состо ит в том, что при его использовании не обеспечивается достаточная помехоустойчивость приборов В зоне рав-новесия. Наиболее близким по технической сущности к предлагаемому является способ уравновешивания цифровых модуляционных мостов переменного тока согласно которому формирование импульсных регулирующих воздействий, вызывающих рабочие шаги уравновешивающего параметра, производят при отсутствии положительных модуляцион ных приращений.амплитуды выходного напряжения измерительной цепи, а оп ределение частных минимумов на каждой декаде цифрового моста так же. как и изменение направления регулировки уравновеишвающего параметр {реверс уравновешивания), осуществ. ляют .по наличию положительных модуляционных приращений этой гилплитуды. При этом модулящюйныё шаги выбирают в два раза большиквс по абсо штной ве личине соответствующих рабочих шагов 23. недостатком такого способа уравновешивания цифровых мостов переменного тока является сложность алгоритма работы и сзёем приборов и понй:женное быстродействие из-за необходимости раздел1,ного осуществления мсяуляцчонных воздействий.и наличия модуляторов на каждой декаде обоих уравновешивающих параметров. Цель изобретения - упрощение схемы приборов при одиощ еменном повышении их быстродействия. Указанная цель достигается тем, что согласно способу уравновешивания цифровых автоматических экстремальных мостов neipeMeHHoro то- , ка по дискретно регулируемым пара; метрам, при котором производят небольшие скачкообразные изменения соответствующего параметра мостовой измерительной цепи и в соответствии со знаком приращения амплитуда; выхо;(иого напряжения этой цепи формируют положительные или отрицательные импульсше регулируюй е воздействия, а регулировку уравновёшиварцего параметра в направлении р авновесия юсуществляют только при отсутствии попояантельных приращений амплитуды выходнбго напряжения Аюстовой измерительнс цепи, pa6o4He и пробные (модуляционные) Шаги на всех декадах (тетрадах) кроме самой младшей, совмещают и выполняют одновременно/ а величину их Bcetvi;a Выбирают равной удвоенному значению дискретности регулировки уравновешивающего параметра на данной декаде тетраде),при этом при отсутствии положительного и наличии отрицательного импульст с регулирующих воздействий сделанный удвоенный рабочий шаг оставляют без изменений, и осуществляют следующий такой же шаг в том же направлении, при появлении положительного икшульсного регулируяхцего воздействия производят изменение направления регулировки уравноIваииваищего параметра и делают один возвратный шаг, равный удвоенному знчению дискретности регулировки на данной декаде (тетраде), при изчезновении отрицательного и отсутствии положительного импульсных регулирую х воздействий также производят изменение направления регулировки урав(ювёшивагацего параметра, а возвратный- шаг выбирают равным единичному значению дискретности регулировки этого паргдаетра на данной тетраде (декаде).
Определение частного миним гма амплитуды выходного напряжения мостовой измерительной цепи и переход на уравновешивание по следующей декаде . ,(тетраде) или по крутому пад аметру производят всегда непосреяственно после выпапнеция одинарного, а также двойного возвратного шага, если перед ним было сформировано хотя бы одно отрицательное импульсное регулирющее воздействие.
На фиг. 1 показана упрощенная схема моста с регулировкой только одного параметра, иллюстрирующая пример реализации предлагаемого способа уравновешивания; на фиг. 2 - графики уравновешивания .-моста.
Прибор содержит мостовую изм ительную цепь 1, экстремум-детектор 2 тактовый генератор 3, реверсивный счетчик 4, триггер 5 реверса, блок б переключения декад, элемент 7 задержки импульсов на один такт, логический элемент ИЛИ 8 суммирования логические элементы 9, 10 и 11 совпадений, логические элементы И 12,; 13 и 14.совпадений с инверсией по одному из входов.
Мостовая измерительная цепь 1 служит для измерения комплексного сопротивления и уравновгаииванйя посредством дискретного регулирования одного из .ее параметров Такое регулирование осуществляется реверсивнш4 счетчиком 4, который имеет два входа. При подаче импульсов на первьб.вход осуществляется счет двойками, а при подаче импульсов на второй вход - единицами i Направление счета реверсивного :Счетчика 4 и, следовательно, направление регулировки ура&новешива1фаего параметра измерительной цепи 1 определяется состоянием триггера 5 ре- . верса. Влок 6 перекл чения декад производит выбор декады уравновешивания посредством управления реверсивным счетчиком 4. Экстре1 мдетектор. 2 имеет два выхода и в соот ветствии со знаком приращения амплитуды выходного нап{ яжения мостовой , измерительной цепи 1 формирует положи7елыше или отрицательные импульсы Ритм работы всему мосту задает тактовый генератор 3, он же управляет логическими элементами 9 - 12. Элемент 7 задержки импульсов управляется также тактовым генератором 3, он задерживает отрицательные импульсы, поступающие с экстремум-детектора 2, на один такт. Сформированный в данный момент отрицательный импульс блокирует логический элемент 13, и задержанный элементом 7 отрицательный импульс не проходит через логический элеменз 13. На выходе логического элемента 13 появляется задержанный В предыдущем такте импульс только тогда, когда отсутствует последующий блокируюпц1й отрицательный импульс, т.е. при прекращении поступления отрицательных импульсов с экстремумдетектора 2. Выход элемента 13 соединен с йходаМи элементов 9 и 14,. Элемент 9 пропускает импульс с тактового генератора 3 на блок 6 переключения декад только при наличии импульса на выходе элемента 13. Иьшульс с элемента 13 проходит через элемент 14 только при отсутствии положительного импульса на выходе экстремумдетектора 2. Выход элемента 14 соединен с логическим элементом 8 суммирования ис логическими элементами 10 и 12. ЕСЛИ на выходе логического элемента 14 появляется импульс, то .. он блокирует-:прохождёние импульса через элемент 12 и открывает элемент 10. 5 реверса управляется логическим элементом.11 совпадений. и срабатывает только в том случае, если на выходе логического элемента 8 суммирования/появится импульс, т.е. при возникновении положительного импульса На выходе экстремум-детектора 2 или при прекращении формирования отрицательных импульсов экстремумдетектором 2.
Уравнове1Ш1вание моста согласно предлагаемого- способу происходит, следующим образом.
Пусть измерительная цепь- 1 на несколько шагов выведена из равновесия, состояние- триггера 5 реверса соответствует регулировке уравновёшивакидего параметра в сторону равновесия, а Положительные и.отрицательные импульсы, на выходе экстремум-детектора 2 отсутствуют (начало уравновешивания. В этом случае в элементе 7 задержки импульса нет, и при срабатывании тактоврго гейератора 3 на выходе логических элементов 13 и 14 совпадений Импульсов не будет. При этом логический элемент 10 совпадений будет заперт, а логический элемент 12 совпадений с инверсией на входе открыт. Через него с тактового генератора 3 поступает импульс на первый вход ревер сивного счетчика 4, который производи дит счет двойками: в сторону равно:весия будет осуществлен рабочий шаг
по уравновешивающему параметру, равный удвоенному значению дискретности его регулировки. Экстремум-детектор 2 сформирует при этом отрицательный импульс, который запишется в элементе 7 задержки импульсов. При следуютем срабатывании тактового генератора 3 будет сделан следующий удвоенный шчг в сторону равновесия, так ка отрицательный импульс с экстремумдетектора 2 заблокирует логический элемент 13, и импульс с элемента 7 задержки импульсов не поступит на его выход. Так будет происходить до достижения равновесия на данной декаде (тетраде). Если при достижеНИИ равновесия на выходе экстремумдетектора 2 появится положительный импульс-, то он закроет логический элемент 14 Для прохождения импульсов с логического элемента 13, пройдет через элемент 8 суммирования и откроет логический элемент 11совпадений для прохождения импульсов с тактового генератора 3 на триггер 5 реверса. Триггер реверса сработает, и в следующем такте реверсивный счетчик 4 произведет, удвоенный возвратный шаг. После этого на логический элемент 9 поступит импульс с тактового генератора 3 и.так как это элемент открыт Импульсом с выхода логического элементу 12, то на блок 6 переключения декад пройДет импульс и вызовет переход мостовой цепи 1 на уравновешивание по следующей младшей декаде. Если же при достижении равновесия на данной декаде экстремудетектором 2 не будут сформированы ни положителььый, ни отрицательный импульсы, то в этом случае импульс с выхода элемента 7 задержки пройдет через логический элемент 13 и поступит на вход логических элементов 9 и 14. Так как элемент 14 будет открыт, то этот импульс пройдет на логический элемент.8 Суммирования, откроет элемент 11, и тактовый генератор 3 переведет триггер 5, реверса в противоположное состояние. Кроме того, импульс с выхода элемента 14 заблокирует прохождение импульсов через логический, элемент 12 и открое элемент 10. Импульс с тактового генератора 3 через элемент 10 пройдет на вход реверсивного счетчика 4, и будет осуществлен возвратный шаг,равный единице дискретной регулировки уравновешивающего параметра на данной декаде. Поскольку, как и в предьадущем случае/ импульс с выхода элемента 13 откроет логический элемент 9 совпадений, то импульс с тактового генератора 3 вызовет срабатывание блока 6 переключения декад
и мостовая цепь 1 будет также переведена на уравновешивание по следующ младшей декаде. .
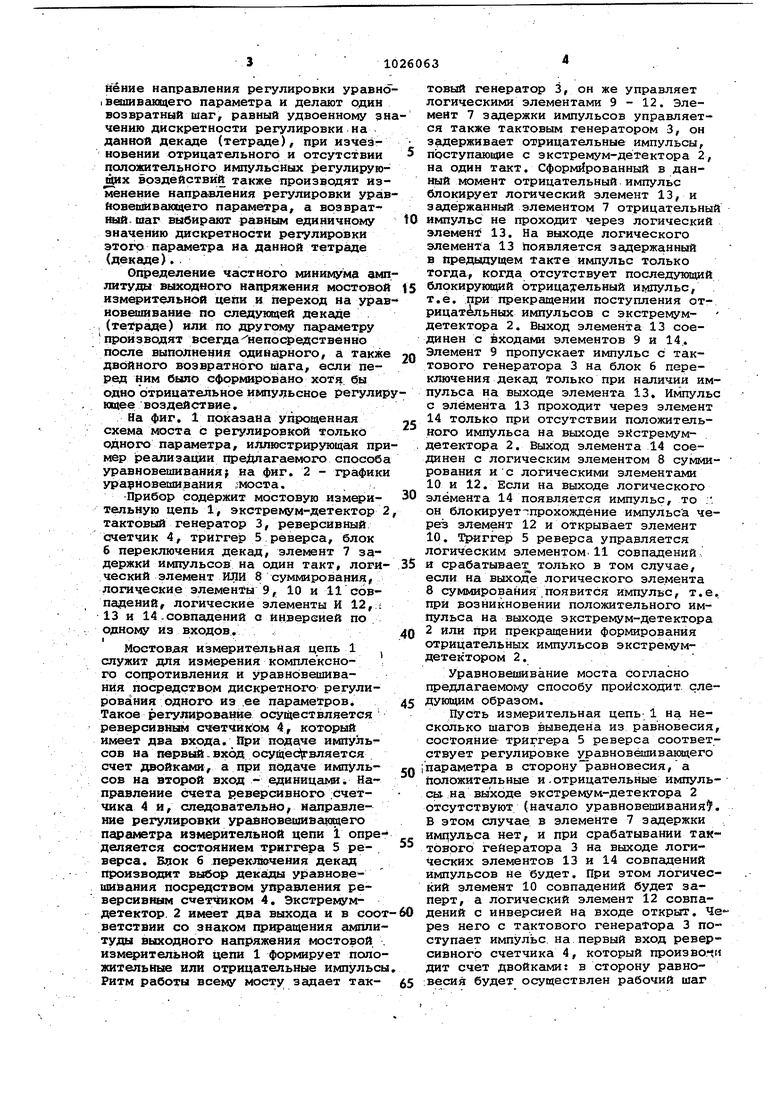
На фиг. 2.1 представлен график уравновешивания моста при нарушений равновесия измерительной цепи на нечетное число шагов дискреуной регулировки уравновешивающего параметра Р, значение которого отложено по оси абсцисс. По оси ординат отложено значение амплитуды выходного напряжения мостовой измерительной цепи UQ. Из состояния, характеризующегося точкой О , мост переходит последовательно с состояния-6 ,су и у/с.. При переходе из состояния otc в состояние -4/возникает на выходе экстремум-детектора положительный иг шульс и при этом произ1водится удвоенный обратный шаг из состояния и в состояние Э1С .Уравновешивание окончено. Осуществляется переход на следующую декаду.
На фиг. 2.2 показан график уравновешивания моста ПРИ нарушении равновесия на четное число шагов дискретности регулировки уравновешивающего параметра Р . Процесс уравновешивания производится так же, как ив предыдущем случае. Однако, так как при переходе из Состояния (J- в состояние ЭЮ положительный импульс не формируется, то возвратный шаг будет равен только единице дискретности регулировки уравновешивающего параметра р и мост перейдет из состояния ЯС в состояние е .
Цифровые з(кст.ремальные мосты для измерения комплексных сопротивлений находят широкое применение в .метрологических лабораториях, при контроле и измерении электрических параметров изделий радиотехнической и электротехнической промышленности, при измерении неэлектрических величин (шкроперемещения, угловые смещения, давление, сила уровень жид- ких веществ и т.п.)при помощи комп- лексных электрических преобразователей. Очевидно, что упрощение таких прибров приведет к снижению их себестоимости и даст значительный экономический эффект. Предлагаемый Способ уравновешивания MOCTOJB позволяет отказаться от применения сложных модуляторов, подключаемых к каждой декаде измерительной цепи моста (при пяти декадах по каждому параметру таких модуляторов девять), несколько увеличив при этом количество используемых простых надежных логических элементов. Кроме того, повышается быстродействие приборов, так как отпадает необходимость в осуществлении модуляционных шагов.
t г ъ ff SB 7 в
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР 230965, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ уравновешивания цифровых модуляционных экстремальных мостов переменного тока | 1978 |
|
SU748256A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
