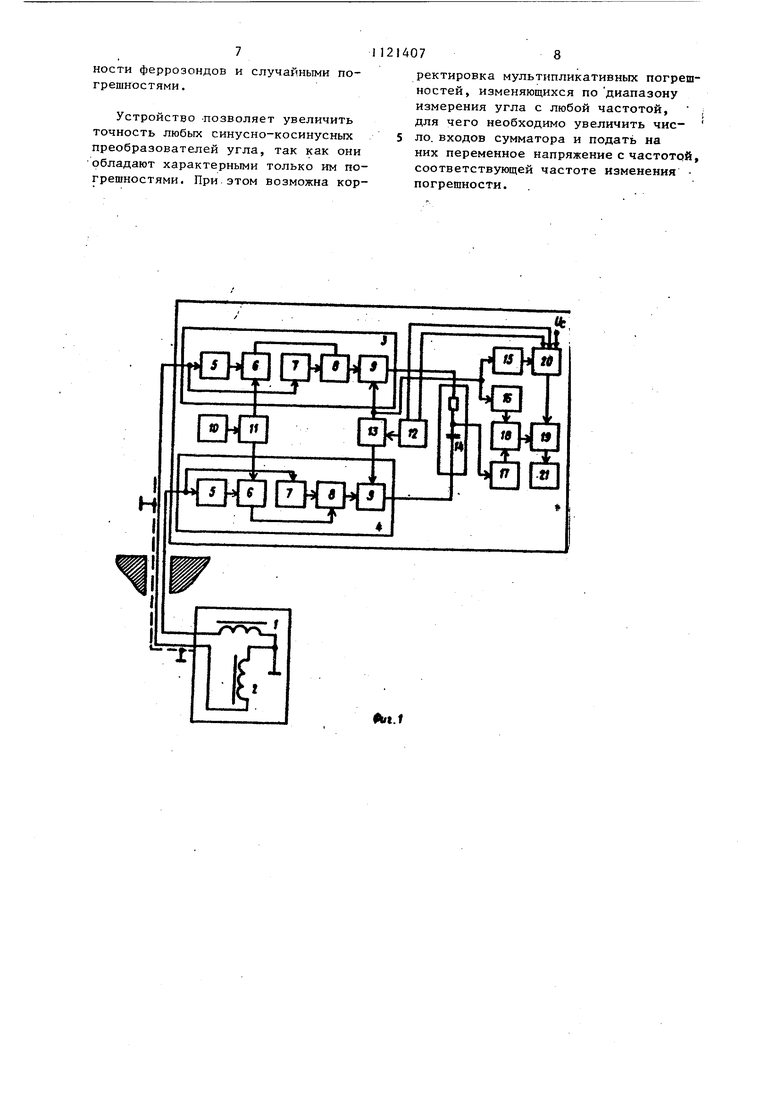
Изобретение относится к промысло вой геофизике и может использоваться для определения азимута буровых геофизических скважин. Известен индукционный датчик магнитного курса, содержащий два феррозонда, оси чувствительности которых горизонтальны и взаимноперпендикулярны ij . Недостатком этого устройства является невозможность непосредственного определения магнитного курса (азимута) без дополнительных преобразований. Известен также феррозондовый дат чик азимута, содержащий датчик азимута, выполненный в виде двух ортогональных однокатушечных феррозондов, датчик длины кабеля, фазовраща тель, два одинаковых канала .преобра зования, состоящих из генератора, и бирательного усилителя, фазового де тектора, удвоителя частоты, модулятора, а также генератор опорного на пряжения, RC-фазовращатель, два три гера Шмитта, последовательно соединенные преобразователь фаза - временной интервал и счетчик 2. Недостатком такого устройства является низкая точность измерения азимута из-за значительной суммарной погрешности, определяемой неидентичностью каналов преобразования, неидентичностью параметров фер розондов , а также неточностью установки их осей чувствительности. Наиболее близким к изобретению по технической сущности является феррозондовый датчик азимута, содер жащий два ортогональных однокатушечных феррозонда, датчик длины кабеля, подключенный к фазовращателю, два одинаковых канала преобразования, состоящих из генератора, избирательного усилителя, фазового детектора, удвоителя частоты и модуля тора, генератор опорного напряжения, НС-фазовращатель, подключенньй входами к выходам модуляторов, два триггера Шмитта, вход одного из которых соединен с выходом RC-фазовра щателя, и счетчик з . Недостатком прототипа является низкая точность вследствие дискретности коррекции по диапазону измерени азиму,та.На каждом интервале погрешнос уменьщается на некоторую постоянную величину, соответствующую данному интервалу. Вследствие нелинейности погрешности по диапазону измерения на каждом интервале коррекции существует некоторая остаточная нескорректированная погрепшость, которая и определяет точность устройства в целом. Уменьшение остаточной погрешности возможно путем увеличения числа интервалов коррекции, но это ведет к значительному усложнению конструкции устройства и к увеличению потребляемой мощности. Поэтому целесообразно производить разбиение диапазона измерения азимута не более чем на 6-8 интервалов, что позволяет увеличить точность лишь в 1,5-2,0 раза. При значительном разбросе параметров устройство обладает значительной остаточной погрешностью и, следовательно, низкой точностью. Целью изобретения является повышение точности и упрощение конструкции устройства. Указанная цель достигается тем, что феррозондовьй датчик азимута, содержащий два ортогональных однокатушечных феррозонда, датчик длины кабеля, подключенный к фазовращателю, два одинаковых канала преобразования, состоящих из генератора, избирательного усилителя, фазового детектора, удвоителя частоты и модулятора, генератор опорного напряжения, ЕС-фазовращатель, подключенный входами к выходам модуляторов, два триггера Шмитта, вход одного из которых соединен с выходом RC-фазовращателя, и счетчик, снабжен делителем частоты на два, генератором пилообразного напряжения, фазовым де тектором, сумматором и компаратором, при этом делитель частоты на два включен между генератором опорного напряжения и входами модуляторов каналов, выход делителя частоты соединен с входами второго триггера Шмитта и генератора пилообразного напряжения, выход последнего подключен к входу сумматора, второй вход которого соединен с генератором а выход - с входом компаратора, второй вход компаратора соединен с выходом фазового детектора, подключенного входами к выходам триггеров Шмитта, а выход компаратора соединен со счетчиком. На фиг. 1 представлена функциональ- ная схема феррозондового датчика азимута; на фиг.2 - диаграммы, поясняющие работу устройства.
3
Ферроэондовый датчик азимута содержит расположенные в скважинном приборе ортогональные однокатушечные феррозонды I и 2, соединенные каротажным кабелем с входами каналов преобразования 3 и 4, каждый из которых состоит из генератора 5, удвоителя частоты 6, избирательного усилителя 7, фазового детектора 8 и модулятора 9, датчик длины кабеля 10, подключенный через фазовращатель I 1 к удвоителям частоты каналов преобразования. Генератор опорного напряжения 12 через делитель частоты на два 13 соединен с входами модуляторов 9, к выходам которых подключен RC-фазовращатель I4. Выход делителя частоты на два 13 соединен также с входами генератора пилообразного напряжения 15 и триггера Шмитта 16, вход второго триггера Шмитта 17 подключен к Сфазовращателю 14. Выходы триггеров 16 и 17 через фазовый детектор 18 соединены с входом компаратора 19, второй вход которого подключен к выходу сумматора 20, входы которого соединены с выходом генератора пилообразного напряжения 15 и генератора .опорного напряжения 12. К выходу компаратора 19 подключен счетчик 21 .
Устройство работает следующим образом.
Напряжение генераторов 5, имеющи разные частоты, подается по каротажному кабелю на обмотки возбуждения феррозондов 1 и 2. Под действием горизонтальной составляющей магнитного поля Земли и переменного магнитного поля, наводимого в сердечниках феррозондов током, протекающим по их обмоткам, в последних возникают ЭДС четных по отношению к частотам генераторов 5 гармоник, амплитуды которых в силу ортогональности феррозондов 1 и 2 пропорциональны синусу и косинусу азимута. Вторая гармоника информационных ЭДС выделяется избирательным усилителем 7. После усиления выделенные напряжения поступают на фазовые детекторы 8, на которые подаются также напряжения удвоенной частоты с удвоителей 6. Для исключения влияния на показания прибора изменения реактивного сопротивления кабеля в процессе его раскручивания предусмотрена автоматическая подстройка фазы в
214074
удвоителях 6 фазовращателем 11 по сигналу датчика длины кабеля 10. В фазовых детекторах 8 переменные инг формационные напряжения преобразу5 ются в постоянные и далее преобразуются модуляторами 9 и делителем частоты на два 13, являющимся источником опорного напряжения модуляторов, в переменные напряжения, ам0 плитуды которых пропорциональны синусу и косинусу азимута, а частоты равны СО/2, где Q - частота генератора 12, и которые поступают на Ь р-фазовращатель 14, настроенный на час5 тоту (J/2 (). Фаза выходного напряжения фазовращателя 14 пропорциональна азимуту. С помсщью триггеров Шмитта i 6 и 17 синусоидальные напряжения с делителя 13 и фазовраQ щателя 14, фаза между которыми пропорциональна азимуту, преобразуются в прямоугольные напряжения, последние поступают на входы фазового детектора 18, в результате чего ,на
5 выходе детектора I8 возникает постоянное напряжение, пропорциональное азимуту, которое можно представить в, виде
и«., ., (,о-oi, (j|
вых1в 18.
где К,о - коэффициент преобразова0 в,
кия детектора 18;
Л - азимут.
При разбросе параметров феррозЬидов 1 и 2, каналов преобразования 3 и 4 возникает некоторая погрешность измерения азимута
. &ct ei-eCu i (2) i где cLu - истинное значение азимуталь ного угла.
Предлагаемое устройство от феррозондов до выходов модуляторов представляет собой синусно-косинусный преобразователь азимутального угла, обладающий характерными погрешностями, а именно - погрешностью от неравенства амплитуд огибающих выходных напряжений модуляторов и погрешностью иеортогональности,выражающейся в неортогональности огибающих
выходных напряжений модуляторов 9. При этом суммарная погрешность от указанных факторов изменяется по гармоническому закону по диапазону измерения азимута (0-360 } с частотой двойного угла. Поэтому суммарную погрешность можно представить в виде
й«,С, .4С2Сое2м.4-Сэ, Сз)
5И
где С и С - постоянные коэффициенты, зависящие от разброса параметров схемы;
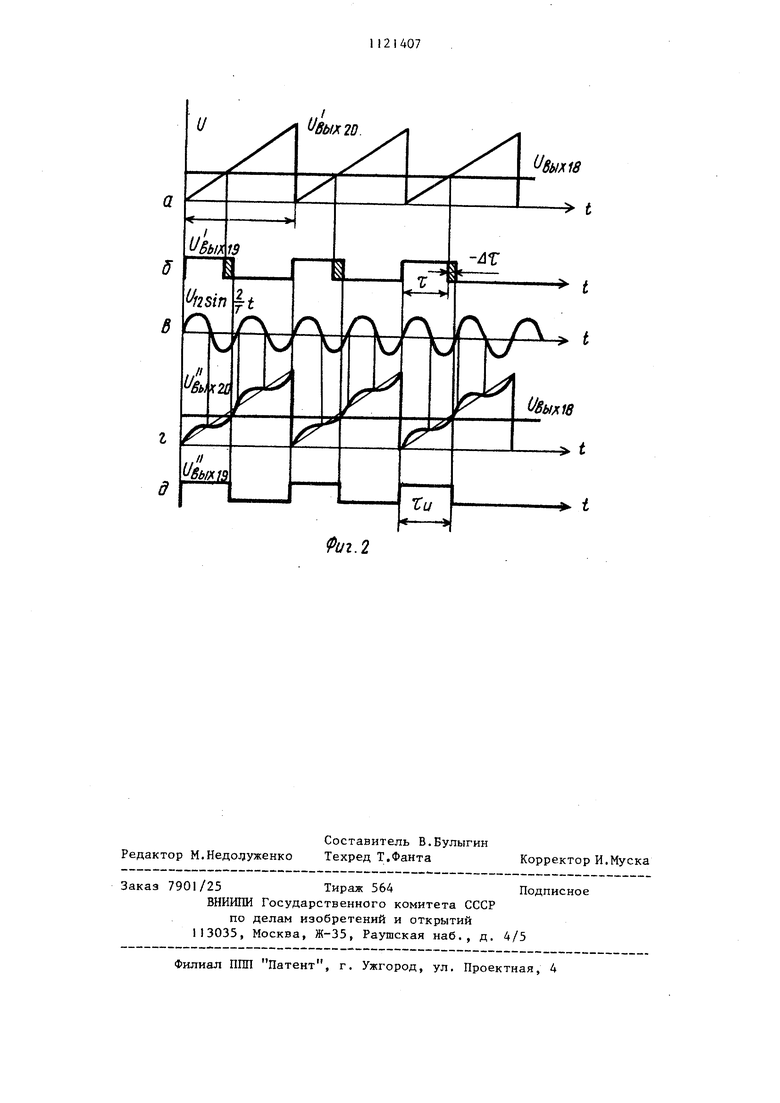
Cj- постоянная величина, характеризующая аддитивнух), не зависящую от (Хг , погрешность. Для коррекции указанных погрешностей.генератор 12 выдает два ортогональных напряжения на входы сум; атора 20, на остальные входы которого поступают пилообразное напряжение с генератора 15, управляемого сигналом делителя частоты 13, и постоянное напряжение смещения . Если на входы сумматора поступает лишь напряжение генератора 15, то при сравнении компаратором 9 пилообразного напряженияUgy, 2(,и постоянного напряженияи |,1д(см. фиг, 2) на выходе компаратора возникает последовательность прямоугольных импульсов, длительность которых определяется равенством
..(.
ВЫХ1в Вых-го )
и
m
18Г
.„.
КОС С,.- t.c ,
m
где Ufr, - размах пилообразного напряжения;
- период пилообразного напряжения ; значение длительности импульсов и погрешность дли тельности. Коррекция осуществляется путем искажения пилообразного напряжения таким образом, чтобы вносилась погрешность с противоположным знаком вследствие чего результирующая погрешность становится равной нулю. Искажение пилообразного напряжения производится в соответствии с форм лой (З) , но во временной области и путем подачи на входы сумматора 20 напряжения генератора 12 и U- , Полученная длительность импульса определяется из равенства 18 вЬ1Х 10 i(,(j-(.C2COs2oc+C5 -Y-24U,Kjo5in C + U,.xLco6 -bfUcX
1407 .6
где (Jin амплитуды ортогональных напряжений, поступающих с генератора 1 2 на входы сумматора 20;
S гО гоп коэффициенты усиления сумматора по соответствующим входам.
Для обеспечения почленного равенства (5) , необходимы следующие IQ условия:
Cr-U,,K o 2-Ui2- o-. К
20
выполнение которых обеспечивается выбором величин и знаков коэффициентов преобразования сумматора 20 по соответствующим входам. На фиг.2 представлены: о - нескорректированные по длительЕ ости 1 мпульсы, снимаемые с выхода компаратора, b - синусная составляющая напряжения генератора 1 2 , поступающая на вход сумматора (косинусная составляющая с целью упрощения отсутствует), 2 искаженное пилообразное напряжение, снимаемое с выхода сумматора 20, полученное путем суммирования пило- . образного напряжения генератора 15 (диаграмма о) с выходным синусоидальным напряжением генератора 12 (диаграмма Ь) , О - выходные импульсы
1
компаратора, длительность которых
скорректирована. При выполнении равенств (6) длительность импульсов на выходе компаратора 19 равна т.е, соответствует истинному значению азимута. Полученный временной интервал в счетчике.заполняется импульсами высокой частоты, которые подсчитываются и преобразуются в цифровой код. Феррозондовый датчик азимута позволяет побысить точность благодаря осуществлению коррекции мультипликационной и аддитивной составляющих погрешности измерения азимута. Устройство позволяет устанавливать феррозонды и выполнять каналы преобразования без точной регулировки и настройки, так как путем коррекции можно свести к минимуму погрещности измерения даже при больших разбросах параметров. С помощью феррозонда можно повысить точность измерения азимута до j:0,2°, конечная величина которой определяется неучтенньми погрешностями от нелинейности феррозондов и случайньши погрешностями.
Устройство -позволяет увеличить точность любых синусно-косинусных преобразователей угла, так как они обладают характерными только им погрешностями. При этом возможна корректировка мультипликативных погрешностей, изменяющихся по диапазону измерения угла с любой частотой, ; для чего необходимо увеличить число, входов сумматора и подат1з на них переменное напряжение с частотой, соответствующей частоте изменения погрешности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Феррозондовый преобразователь азимута | 1981 |
|
SU956773A1 |
| Феррозондовый датчик азимута | 1980 |
|
SU964119A2 |
| Преобразователь азимута | 1980 |
|
SU947408A1 |
| Феррозондовый датчик азимута | 1979 |
|
SU802535A1 |
| Инклинометр | 1981 |
|
SU994702A1 |
| Феррозондовый датчик азимута | 1982 |
|
SU1025877A1 |
| Преобразователь азимута | 1981 |
|
SU981598A1 |
| Устройство для измерения азимута скважины | 1976 |
|
SU709805A1 |
| Феррозондовый преобразователь азимута | 1981 |
|
SU1008432A1 |
| Формирователь геомагнитного репера | 1983 |
|
SU1137191A1 |
ФЕРРОЗОНДОВЬЙ ДАТЧИК АЗИМУТА, содержащий два ортогональных однокатушечных феррозонда, датчик длины кабеля, подключенный к фазовращателю, два одинаковых канала преобразования, состоящих из генератора, избирательного усилителя, фазового детектора, удвоителя частоты и модулятора, генератор опорного напряжения, RC-фазовращатель, подключенный входами к выходам модуляторов, два триггера Шмитта, вход одного из которых соединен с вьпсодом ЦС-фазовращателя, и счетчик, отличающийся тем, что, с целью повьше- ния точности измерения азимута, он снабжен делителем частоты на два, генератором пилообразного напряжения, фазовым детектором, сумматором и компаратором, при этом делитель частоты на два включен между генератором и входами модуляторов каналов, выход делителя частоты соединен С: входами второго триггера Шмитта и ге нератора пилообразного напряжения, (Л выход последнего подключен к входу сумматора, второй вход которого соединен с генератором, а выход - с входом компаратора, второй вход компаратора соединен с выходом фазойого детектора, подключенного входами к выходам триггера Шмитта, а выход компаратора соединен со счетчиком. ка
Фиг.2
8Ш18
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Индукционный датчик магнитного курса | 1977 |
|
SU636480A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
