Изобретение относится к учебным приборам, в частности к устройствам для демонстрации,
Известен прибор для демонстрации гироскопического эЛфекта, содержащий установленные на св.язанной с приводом поворотной платформе две инерционные массы и механизм кинематической связи масс 1.
Извест ный прибор не обеспечивает достаточной наглядности.демонстрации.
Цеэль изобретения - повыыение наглядности .
Поставленная цель достигается тем, что прибор для демонстрации гироскопического эффекта, содержащий установленные на связанной с приводом поворотной платформе две инерционные .массы и механизм кинематической связи масс, имеет расположенную па платформе соосно с осью ее вращения центральную стойку, две диаметрально противолежаыие относительно нее периферийные стойки и два ограничителя поворота масс, ллатформа выполнена в виде диска с градусными шкалами, а инерционные массы .в виде маховиков, при этом механизм кинематической связи масс состоит из двух пар конических шестерен и двух П-образных рычагов, каждый из которы несет на одном конце втулку, расположенную в центральной стойке, указатель угла поворота маховиков - на другом конце, расположенном в одной из периферийных стоек и в средней части - патрон, в котором расположена ось одного из маховиков,связан-ная с шестерней одной из пар,а оси двух других шестерен установлены во втулках.
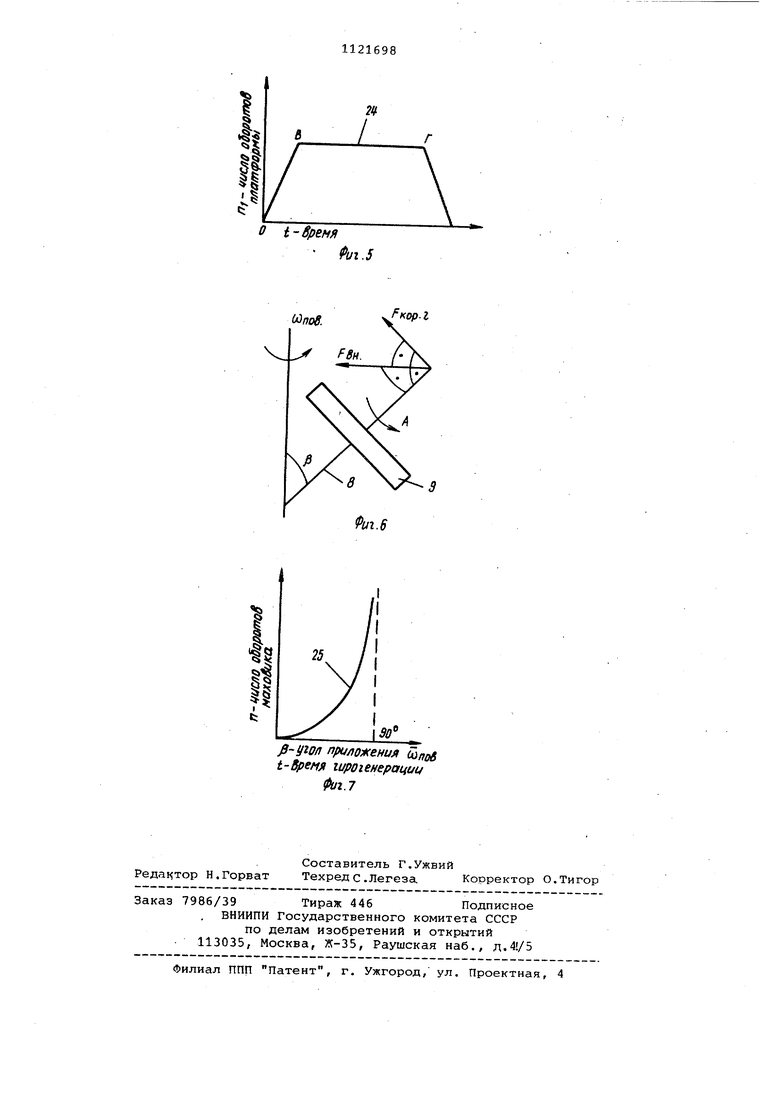
На фиг.1 и фиг.2 схематически представлен прибор, соответственно вид прямо и вид сверху; на фиг.З функциональная схема прибора; на фиг.4 - кривая зависимости угла об подъема маховиков от числа п, оборотов платформы; на Фиг.5 - кривая зависимости числа п - оборотов платформы от времени t; на фиг.б - функциональная схема в режиме гирогенерации; на фиг,7 - кривая зависимости числа п оборотов маховика от угла j и времени t гирогенерации.
Учебный прибор по физике содержит выполненную ь виде диска платформу 1, на которой по диаметру платформы расположены три стойки 2, одна по центру, а.две, диаметрально противолежащие относительно нее, периферийные по краям, при этом стой ки 2 снабжены в верхней части отверстиями 3, два П-образнь1Х рычага 4, снабженные каждый с одной сто РОНЫ указателем угла поворота 5, ,а с другой сторона - втулкой 6, соосной с указателем 5, а перпендикулярно указателю 5 и втулке 6 на рычагах 4 установлены патроны 7, в которые входят оси 8 маховиков 9,
На одном из маховиков 9 нанесена цветная метка 10.
На осях В маховиков установлены первые конические 1гестерни 11,
Втулки б рычагов4 входят в отверстие 3 центральной стойки 2, а указатели 5 рычагов 4 - в отверстия 3 крайних стоек.
На третьей оси 12 вращения через втулки б установлены вторые конические 1честерни 13, входящие в зацепление с первыми коническими иестернями 11.
На указателях 5 установлены параллельно осям 8 стрелки 14, .
В плоскости передвижения стрелок 14 установлены две шкалы 15 с нониусом в градусах.
Радиально отверстиям 3 в крайних стойках 2 установлены фиксаторы 16, представляющие собой винты с барашками.
Ограничители 17 ограничивают отклонение осей 8 маховиков 9 более чем на 90° от вертикали.
Платформа 1 установлена на шпинделе 18 центрифуги 19,
Центрифуга 19 соединена с регулятором 20 оборотов.
Регулятор 20 оборотов электрически связан со сторобоскопом 21, Центрифуга 19 через реле времени 22 подключена к электросети.
На предлагаемом учебном приборе демонтирируют гироскопический эффект, заключающийся в том, что если к вращающемуся гироскопу приложить пару сил, стремящуюся повернуть его около оси, перпендикулярной к. оси вращения,то гироскоп, действительно станет поворачиваться, но только вокруг третьей оси, перпендикулярнойк nepBtM двум.
Кроме того, демонстрируют гирогеМерацию, которая заключается в том, что если к вращающемуся гироскопу приложить пару сил, стремящуюся повернуть его около оси, перпендикулярной к оси враирния, при заторможенном Кориолисовом ускорении, то энергия приложенных сил переходит на увеличение вращения гироскопа (термин -. заторможенное Корнолисово ускорение означает воспрепятствование поворота гироскопа вокруг третьей оси, перпендикулярной к первым двум),
Для демонстрации гироскопического эффекта оператор вывинчивает на один, два оборота фиксаторы 16, а затем, намотав на ось 8 нить, тянет ее с нарастакядей скоростью, раскручивая маховики по стрелке А (нить
условно не показана), при этом реле времени 22 переведено на интервал времени, равный бесконечности (т.е. реле закорочено и напряжение сети подано на центрифугу19).
Маховики 9 вращаются синхронно благодаря наличию кинематической связи, образованной первьлми коническими шестернями 11,вторыми . коническими шестернями 13 и третьей осью 1 вращения. .
Затем оператор регулятором 20 оборотов заставляет поворачиваться шпиндель 19 и платформу 1 по стрелке Б, что приводит к появлению моментов М-М и M,-Mf на первом и втором маховиках 9, обусловленных Кориолисовыми ускорениями.
Под действием этих моментов маховики 9 начинают подниматься, при этом рычаги 4 начинают встречно поворачиваться на валах 5 и вхулках 6
Стрелка 14 по нониусу шкалы 15 указывает отклонение в градусах.
Для удобства наблюдения за.положением маховиков 9 стробоскоп 21 дает вспы-чки света с частотой, равной числу П| оборотов центрифуги, при этом стробоскоп 21 синхронизирован с центрифугой 19 через электрическую связь и регулятор 20 оборотов.
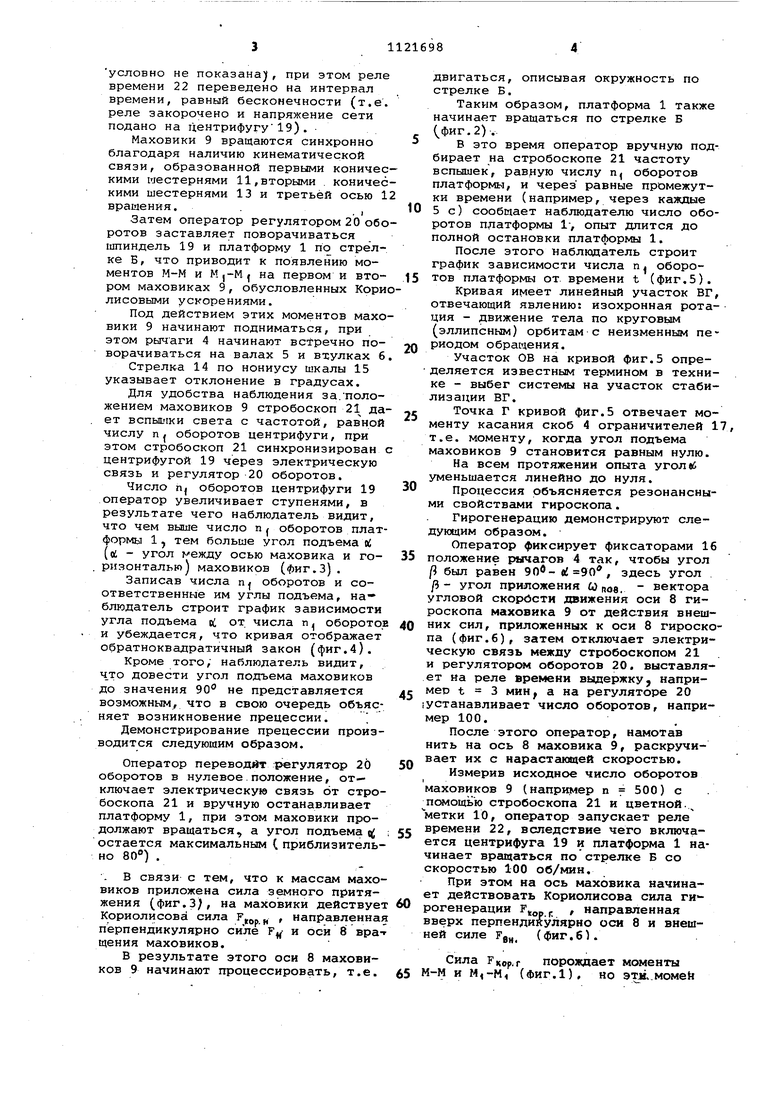
Число nj оборотов центрифуги 19 оператор увеличивает ступенями, в результате чего наблюдатель видит, что чем выше число п j оборотов платформы Ij тем больше угол подъема ei (ci - угол гвжду осью маховика и горизонталью) маховиков (фиг.З).
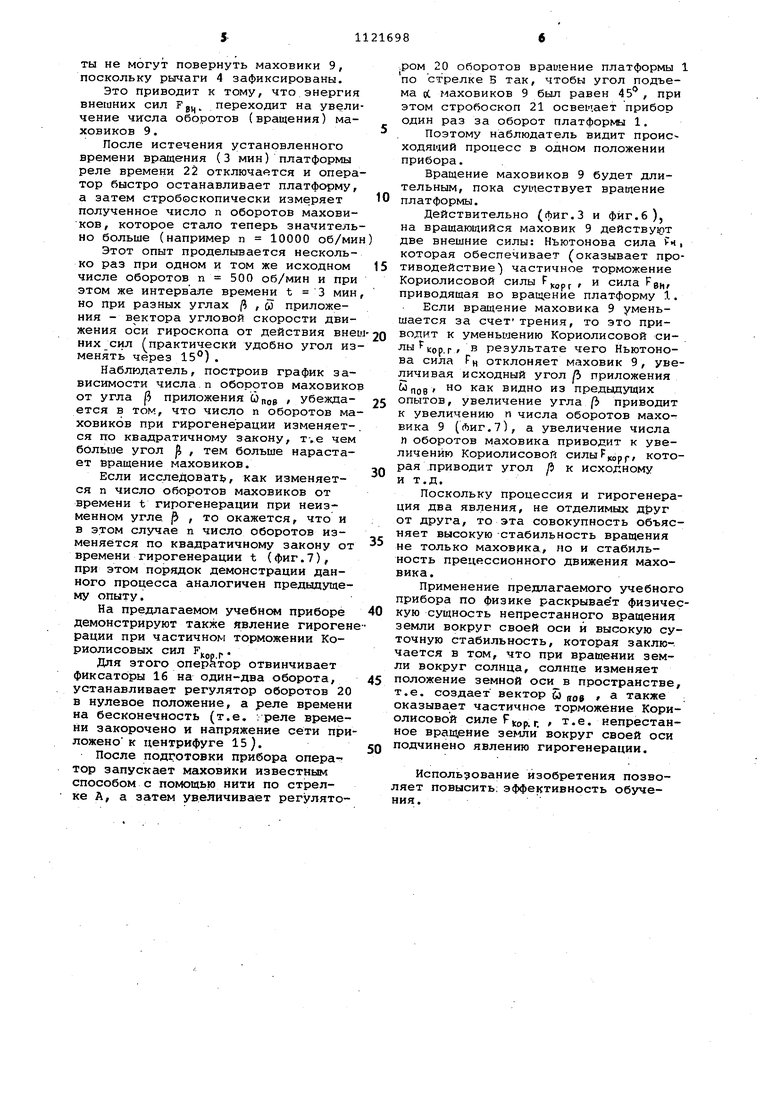
Записав числа nj оборотов и соответственные им углы подъема, на блюдатель строит график зависимости угла подъема tt от числа г оборотов и убеждается, что кривая отображает обратноквадратичный закон (фиг.4).
Кроме того; наблюдатель видит, что довести угол подъема маховиков до значения 90° не представляется возможным, что в свою очередь объясняет возникновение прецессии. .
Демонстрирование прецессии производится следующим образом.
Оператор переводит регулятор 20 оборотов в нулевое.положение, отключает электрическую связь от стробоскопа 21 и вручную останавливает платформу 1, при этом маховики продолжают вращаться, а угол подъема ц; остается максимальным С приблизительно 80) .
В связи с тем, что к массам маховиков приложена сила земного притяжения (фиг.З), на маховики действует Кориолисова сила F,- , направленная перпендикулярно силе и оси 8 вращения маховиков.
В результате этого оси 8 маховиков 9 начинают процессировать, т.е.
двигаться, описывая окружность по стрелке Б.
Таким образом, платформа 1 также начинает вращаться по стрелке Б (фиг.2)..
В это время оператор вручную подбирает на стробоскопе 21 частоту вспышек, равную числу п оборотов платформы, и через равные промежутки времени (например, через каждые
0 5 с) сообщает наблюдателю число оборотов платформы 1-, опыт длится до полной остановки платформы 1.
После этого наблюдатель строит график зависимости числа п оборотов платформы от. времени t (фиг.5).
5
Кривая имеет линейный участок ВГ, отвечающий явлению: изохронная рота- ция - движение тела по круговым (эллипсньпи) орбитам с неизменным периодом обращения.
0
Участок ОВ на кривой фиг.З определяется известным термином в технике - выбег системы на участок стабилизации ВГ.
Точка Г кривой фиг.5 отвечает мо5менту касания скоб 4 ограничителей 17, т.е. моменту, когда угол подъема маховиков 9 становится равным нулю.
На всем протяжении опыта угол «и уменьшается линейно до нуля.
0
Процессия объясняется резонансными свойствами гироскопа.
Гирогенерацию демонстрируют следующим образом.
Оператор фиксирует фиксаторами 16
5 положение рычагов 4 так, чтобы угол / был равен eJ 90 , здесь угол /3- УГОЛ приложения U пов, вектора угловой скорости движения оси 8 гироскопа маховика 9 от действия внешних сил, приложенных к оси 8 гироско0па (фиг.б), затем отключает электрическую связь межлу стробоскопом 21 и регулятором оборотов 20. выставляет на реле времени выдержку, например t 3 мин а на регуляторе 20
5 iустанавливает число оборотов, например 100.
После этого оператор, намотав нить на ось 8 маховика 9, раскручивает их с нарастающей скоростью.
0
Измерив исходное число оборотов маховиков 9 (напри1чер п f 500) с псмощью стробоскопа 21 и цветной., метки 10, оператор запускает реле времени 22, вследствие чего включа5ется центрифуга 19 и платформа 1 начинает вращаться по стрелке Б со скоростью 100 об/мин.
При этом иа ось маховика начинает действовать Кориолисова сила рогенерации F , направленная вверх перпендикулярно оси 8 и внеш(фиг.6).
ней силе F,
вн.
Сила FKop.r порождает момеиты 65 М-М и М,-М4 (фиг.1), но этж.момей
тьа не могут повернуть маховики 9, поскольку рычаги 4 зафиксированы.
Это приводит к тому, что энергия внешних сил Fg, переходит на увеличение числа оборотов (вращения) маховиков 9.
После истечения установленного времени вращения (3 мин) платформы реле времени 22 отключается и оператор быстро останавливает платформу, а затем стробоскопически измеряет полученное число п оборотов маховиков, которое стало теперь значительно больше (например п 10000 об/ми
Этот опыт проделывается несколько раз при одном и том же исходном числе оборотов п 500 об/мин и при этом же интервале времени t 3 мин но при разных углах / , Ы приложения - вектора угловой скорости движения оси гироскопа от действия вне них сил (практически удобно угол изменять через 15°).
Наблюдатель, построив график зависимости числа п оборотов маховико от угла р приложения Unoe убеждается в том, что число п оборотов маховиков при гирогенерации изменяется по квадратичному закону, т-,в чем бсэльше угол , тем больше нарастает вращение маховиков.
Если исследовать, как изменяется п число оборотов маховиков от времени t гирогенерации при неизменном угле. , то окажется, что и в этом случае п число оборотов изменяется по квадратичному закону от времени гирогенерации t (фиг.7), при этом порядок демонстрации данного процесса аналогичен предыдущему ОПЫТУ.
На предлагаемом учебном приборе демонстрируют также явление гирогенрации при частичном торможении Кориолисовых сил Г г
Для этого оператор отвинчивает фиксаторы 16 на один-два оборота, устанавливает регулятор оборотов 20 в нулевое положение, а реле времени на бесконечность (т.е. .реле времени закорочено и напряжение сети приложено к центрифуге 15).
После подготовки прибора оператор запускает маховики известным способом с помощью нити по стрелке А, а затем увеличивает регулято.ром 20 оборотов вращение платформы 1 по стрелке Б так, чтобы угол подъема сс маховиков 9 бал равен 45 , при этом стробоскоп 21 освещает прибор один раз за оборот платформы 1.
Поэтому наблюдатель видит проис ходящий процесс в одном положении прибора.
Вращение маховиков 9 будет длительным, пока существует вращение платформы.
Действительно (фиг.З и фиг.б), на вращающийся маховик 9 действует две внешние силы: Ньютонова сила , которая обеспечивает (оказывает противодействие) частичное торможение Кориолисовой силы и сила FBH, приводящая во вращ,ение платформу 1.
Если вращение маховика 9 уменьшается за счеттрения, то это приводит к уменьшению Кориолисовой силы цорр, в результате чего Ньютонова сила FH отклоняет маховик 9, увеличивая исходный угол fb приложения to nog, но как видно из предьщущих опытов, увеличение угла (Ь приводит к увеличению п числа оборотов маховика 9 (Лиг.7), а увеличение числа п оборотов маховика приводит к увеличению Кориолисовой силыРадрр, которая .приводит угол р к исходному и т.д.
Поскольку процессия и гирогенерация два явления, не отделимых друг от друга, то эта совокупность объясняет высокую -стабильность вращения не только маховика, но и стабильность прецессионного движения маховика.
Применение предлагаемого учебного прибора по физике раскрывает физическую сущность непрестанного вращения земли вокруг своей оси и высокую суточную стабильность, которая заключается в том, что при вращении земли вокруг солнца, солнце изменяет положение земной оси в пространстве, т.е. создает вектор и ао также оказывает частичное торможение Кориолисовой силе F,;(,p, г , т.е. непрестанное вращ,ение земли вокруг своей оси подчинено явлению гирогенерации.
Использование изобретения позволяет повысить: эффективность обучения.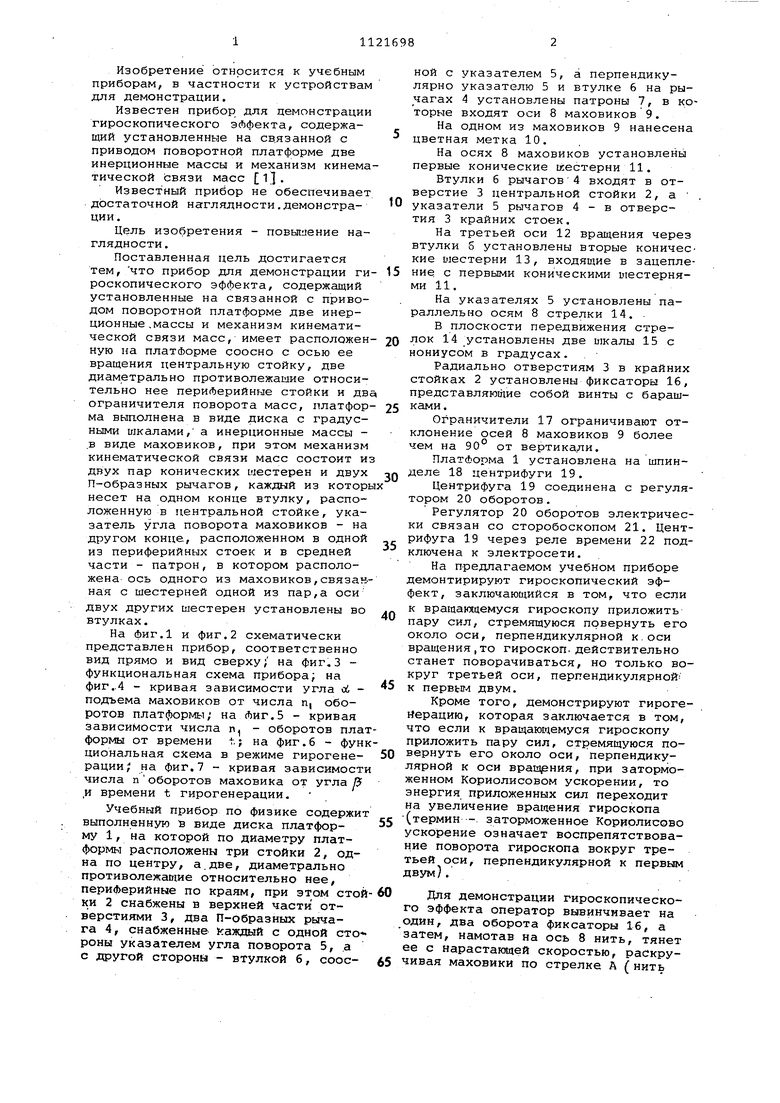
| название | год | авторы | номер документа |
|---|---|---|---|
| Учебный прибор для демонстрации прецессии гироскопа | 1988 |
|
SU1555706A1 |
| ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ДЕЙСТВИЯ КОРИОЛИСОВОЙ СИЛЫ ИНЕРЦИИ | 1991 |
|
RU2016420C1 |
| Учебный прибор для демонстрации гироскопического эффекта | 1981 |
|
SU957252A1 |
| УЧЕБНЫЙ ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ГИРОСКОПИЧЕСКОГО ЭФФЕКТА | 1992 |
|
RU2028011C1 |
| ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ГИРОСКОПИЧЕСКОГО ЭФФЕКТА | 1999 |
|
RU2151426C1 |
| ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ГИРОСКОПИЧЕСКОГО ЭФФЕКТА | 1992 |
|
RU2051422C1 |
| УЧЕБНЫЙ ПРИБОР ПО ФИЗИКЕ | 1991 |
|
RU2017228C1 |
| Установка для демонстрации микромеханического авиагоризонта | 2021 |
|
RU2758807C1 |
| Учебный прибор по механике | 1990 |
|
SU1767513A1 |
| ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ДЕЙСТВИЯ КОРИОЛИСОВОЙ СИЛЫ ИНЕРЦИИ | 1994 |
|
RU2078378C1 |
ПРИВОР ДЛЯ ДЕМОНСТРАЦИИ ГИРОСКОПИЧЕСКОГО ЭФФЕКТА, содержащ установленные на связанной с приво дом поворотной платформе две инерционные массы и механизм кинематической связи масс, отличаю щийся тем, что, с целью повыш ния наглядности, он имеет расположенную на платформе соосно с осью вращения центральную стойку, две диаметрально противолежащие относи Фиг.1 тельно нее периферийные стойки и два ограничителя поворота масс, платформа выполнена в виде диска с градусными шкалами, а инерционные массы - в виде маховиков, при этом механизм кинематической связи масс состоит из двух пар конических шестерен и двух П-образных рычагов, каждый из которых несет на одном конце втулку, расположенную в центральной стойке, указатель угла поворота маховиков - на другом- конце,« расположенном в одной из периферийных стоек и в средней части - патрон , в котором расположена ось одного из маховиков, связанная с шестерней одной из пар, а оси двух других шестерен установлены во втулках.
О . ft и о1 уютов платформы
игЛ
О i-бремя
приложения t-Врепя гирогенерациц Фиг.7
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
