Изобретение относится к учебным демонстрационным приборам по гироскопической технике (относится к наглядным пособиям) и предназначено для расширения демонстрационных возможностей при изучении авиагоризонтов.
Известен аналог (Патент РФ № 2658554. Тренажер для изучения авиагоризонта /Кривошеев С.В., Галиева А.И., Стрелков А.Ю. Опубликовано: 21.06.2018 Бюл. № 18). Тренажер выполнен в виде стенда, передняя панель которого содержит кинематическую схему авиагоризонта с изображением основных функциональных узлов и элементов (векторы кинетического момента, углов ориентации, моментов коррекционных моторов и угловых скоростей прецессии), поясняющих принцип действия, которые подключены к соответствующим задатчикам для формирования технических задач и ответов. Имеется также логическое устройство, которое анализирует правильность ответов и выдает информацию о верности ответов и запускает имитацию движения вектора кинетического момента.
Одной из основных проблем при изучении правила прецессии гироскопических приборов является умение грамотно применять правило прецессии в различных режимах работы гироприборов.
В изобретении на примере тренажера для изучения авиагоризонта введены технические решения, которые позволяют оператору (обучающемуся) самостоятельно выработать навыки на применение правила прецессии при построении авиагоризонтов.
Однако указанный тренажер, поясняя принцип построения классического авиагоризонта, не позволяет пояснить построение авиагоризонта на основе микромеханических инерциальных датчиков и продемонстрировать различные виды индикации, что очень важно для развитии навыков при обучении пилотированию с применением тренажеров.
В качестве прототипа выбрана бесплатформенная инерциальная курсовертикаль (Патент РФ №2249791. Бесплатформенная инерциальная курсовертикаль / Березин Д.Р., Кизимов А.Т., Алексеев С.М. и др. Опубликовано: 10.04.2005 Бюл. № 10). Бесплатформенная инерциальная курсовертикаль содержит трехканальный блок датчиков угловых скоростей, трехканальный блок линейных акселерометров, вычислитель, включающий блок интеграторов, формирователь производных от углов ориентации, блок коррекции, блок вычисления наблюдаемой вертикали, блок вычисления ошибок курсовертикали, фильтр, при этом входы формирователя производных от углов ориентации соединены с выходами трехканального блока датчиков угловых скоростей и выходами блока интеграторов, блок коррекции соединен с выходами формирователя производных от углов ориентации и выходами фильтра, а выходы блока коррекции соединены с блоком интеграторов, при этом входы блока вычисления ошибок курсовертикали соединены с выходами блока вычисления наблюдаемой вертикали, с выходами блока выставки курса и с выходами блока интеграторов, а выходы блока вычисления ошибок курсовертикали соединены с фильтром, входы блока вычисления наблюдаемой вертикали соединены с выходами трехканального блока линейных акселерометров, входы блока выставки курса соединены с выходом блока коррекции и с аппаратурой, вычисляющей начальную или накопившуюся ошибку по курсу.
Прототип имеет недостаток, заключающийся в отсутствии аппаратных и программных средств демонстрации различных видов индикации каналов вертикали по крену и тангажу, а также отсутствие показа влияния на точность определения углов крена и тангажа типа параметров ориентации (углов Эйлера или направляющих косинусов) при тангаже стремящемся к ± 90ͦ .
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в расширении демонстрационных возможностей, связанных с особенностями построения видов индикации авиагоризонтов, что очень важно при обучении пилотированию на тренажерах с различными видами индикации, а также состоящих в отражении влияния типа параметров ориентации на точность определения углов крена и тангажа.
Технический результат достигается тем, что в установке для демонстрации микромеханического авиагоризонта, содержащей трёхканальный комбинированный блок микромеханических гироскопов и акселерометров, измерительные оси которых расположены ортогонально, а выходы комбинированного блока подключены на соответствующие входы микроконтроллера, новым является то, что трёхканальный комбинированный блок расположен на платформе в кардановом подвесе, с осями которого кинематически связаны датчики углов крена и тангажа и соответственно двигатели крена и тангажа, при этом установка содержит дисплей, задатчик типа параметров ориентации, задатчик типа индикации, задатчики углов крена и тангажа, подключенные своими выходами на соответствующие входы двигателей, а выходы датчиков углов крена и тангажа, через последовательно соединенные первый и второй преобразователи сигналов и соответственно первый и второй преобразователи аналог-код, подключены на первый и второй входы микроконтроллера, на оставшиеся входы которого подключены задатчик типа параметров ориентации, при этом, если на его выходе будет логическая «единица», то в микроконтроллере будут использоваться параметры ориентации в виде углов Эйлера-Крылова, а, если на его выходе будет логический «ноль», то в микроконтроллере будут использоваться параметры ориентации в виде направляющих косинусов, и задатчик типа индикации, при этом, если на его выходе будет логическая «единица», то на дисплее будет сформирована индикация «вид с Земли на самолёт», а если на его выходе будет логический «ноль», то на дисплее будет сформирована индикация «вид с самолёта на Землю», а выход микроконтроллера соединен с входом дисплея.
Сущность изобретения поясняется чертежами, представленными на фиг.1 – фиг.4.
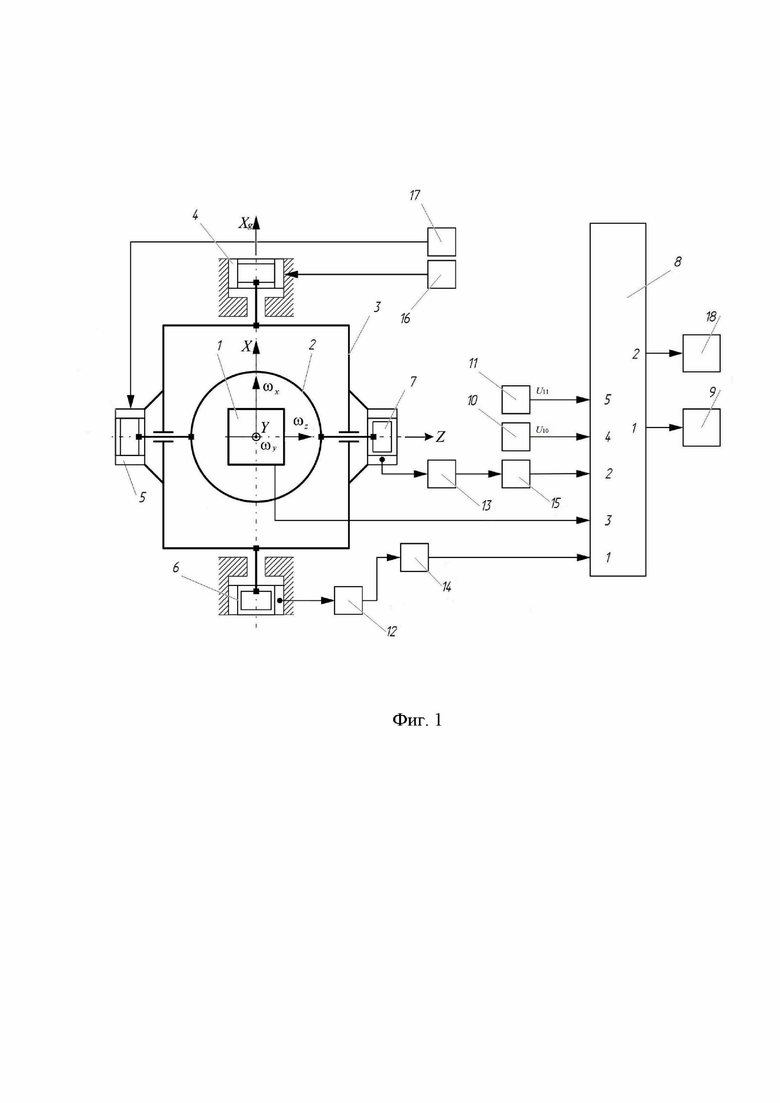
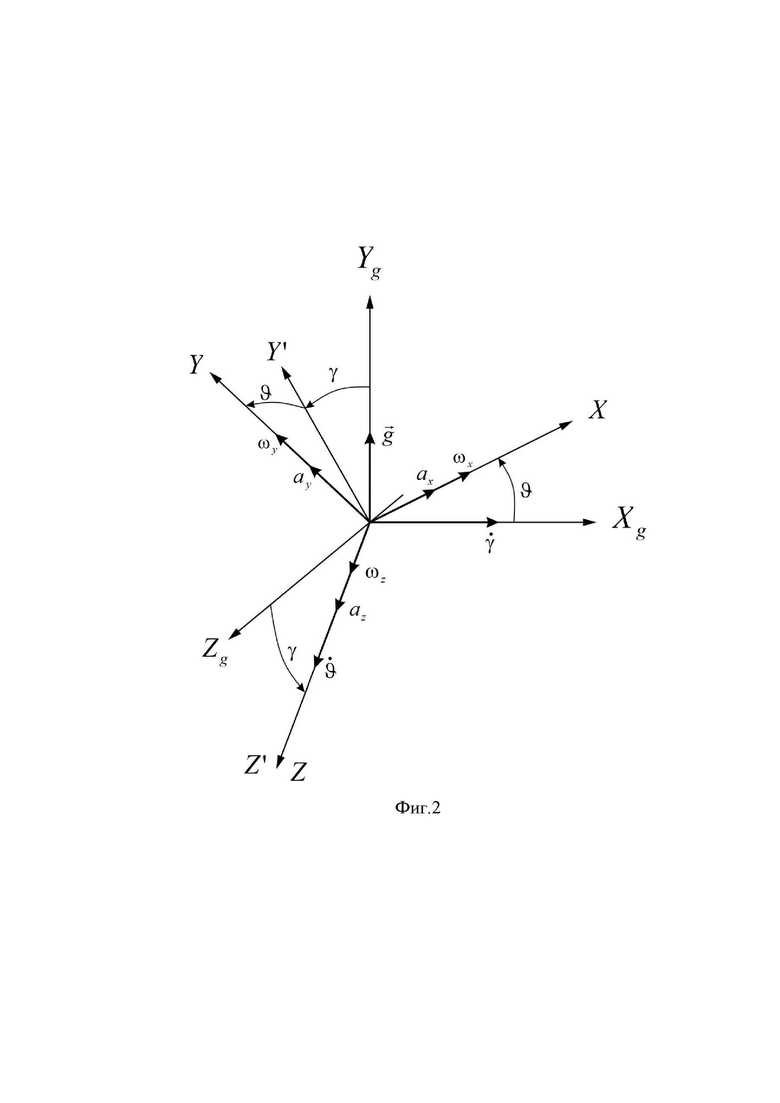
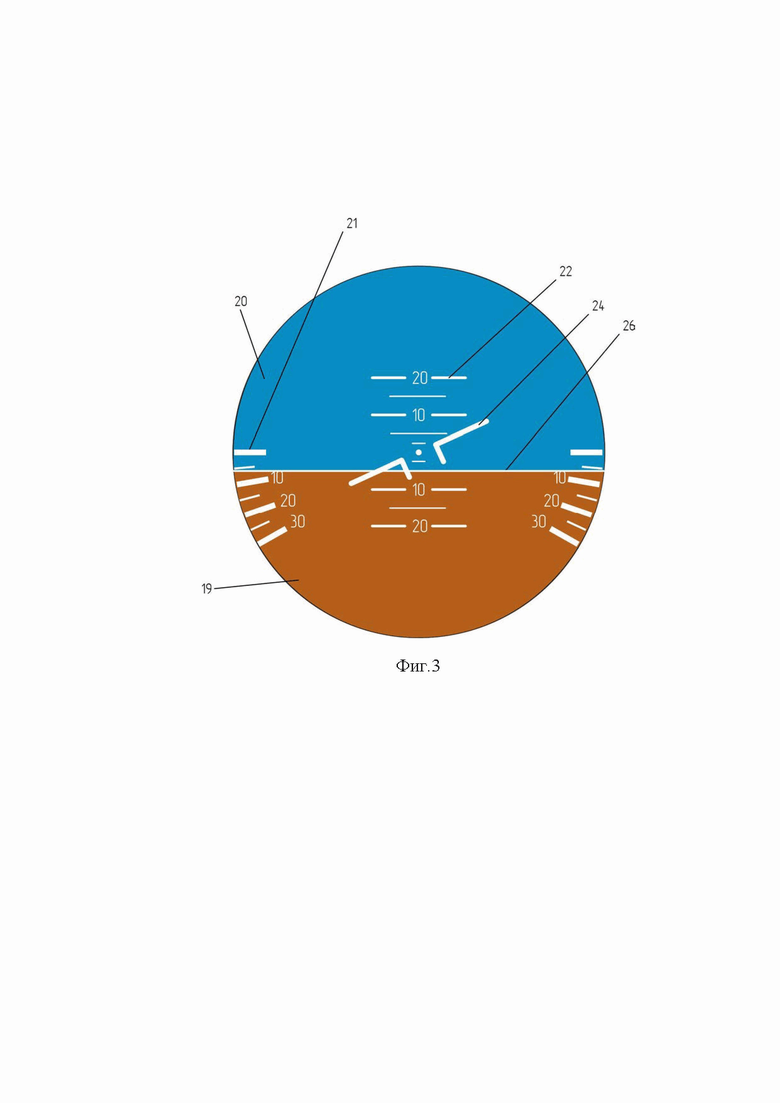
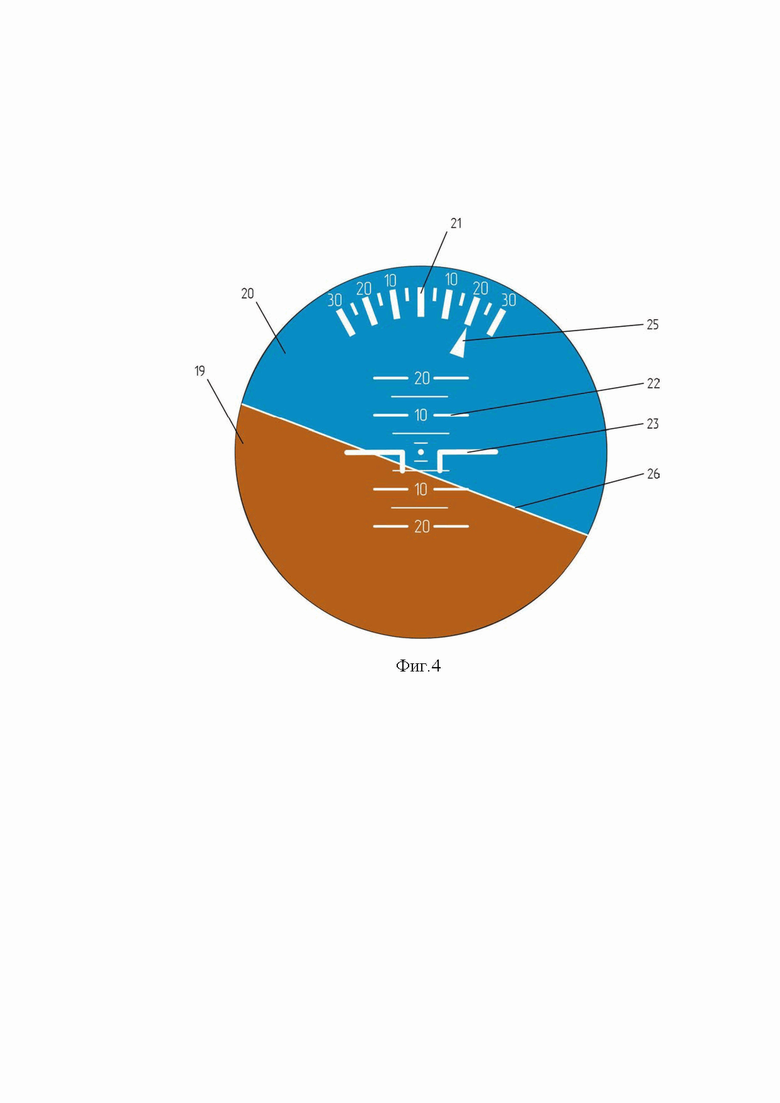
Фиг.1 – функциональная схема установки; фиг.2 – системы координат (СК), поясняющие работу двухосного подвеса с трехканальным блоком; фиг.3 – схема индикации «вид с Земли на самолет» (обратная индикация); фиг.4 – схема индикации «вид с самолета на Землю» (прямая индикация).
На фиг.1 приняты следующие обозначения:
1 – трёхканальный комбинированный блок микромеханических гироскопов и акселерометров;
2 – платформа;
3 – наружная рама;
4 – двигатель крена;
5 – двигатель тангажа;
6 – датчик углов крена;
7 – датчик углов тангажа;
8 – микроконтроллер;
9 – дисплей;
10 – задатчик типа индикации;
11 – задатчик типа параметров ориентации;
12 – первый преобразователь сигналов;
13 – второй преобразователь сигналов;
14 – первый преобразователь аналог-код;
15 – второй преобразователь аналог-код;
16 – задатчик угла крена;
17 – задатчик угла тангажа;
18 – персональный компьютер.

Пояснение буквенных обозначений приведено на фиг.2.
Фиг.2 – схема взаимного расположения осей связанной системы координат и нормальной (горизонтальной), на которой приняты следующие обозначения:







На фиг.3 и фиг.4 приняты следующие обозначения:
19 – полигон земли;
20 – полигон неба;
21 – риски крена с шагом 5 угловых градусов;
22 – риски тангажа с шагом 5 угловых градусов;
23 – статическая модель самолёта;
24 – подвижная модель самолёта;
25 – указатель угла крена;
26 – линия искусственного горизонта.
При этом на фиг.3 и фиг.4 в качестве примера приведены одинаковые показания: левый крен 20 градусов, тангаж – кабрирование пять градусов.
Установка для демонстрации микромеханического авиагоризонта в соответствии с фиг.1 содержит трёхканальный комбинированный блок микромеханических гироскопов и акселерометров 1, установленный в кардановом подвесе, состоящим из платформы 2 (она является внутренней рамой), на которой блок 1 закреплен жестко, и наружной рамы 3. На оси вращения наружной рамы установлены двигатель крена 4, управляемый задатчиком угла крена 16, и датчик углов крена 6. На оси вращения платформы установлены двигатель тангажа 5, управляемый задатчиком угла тангажа 17, и датчик углов тангажа 7.
Задатчик типа параметров ориентации 11 выдаёт дискретный сигнал в виде логического ноля или логической единицы, который поступает на пятый аналоговый вход общего назначения микроконтроллера 8. Задатчик типа индикации 10 формирует дискретный сигнал в виде логического ноля или логической единицы, который поступает на четвертый аналоговый вход общего назначения микроконтроллера 8. Отображение искусственного горизонта происходит на дисплее 9 (например, ILI9486), вход которого соединён параллельным интерфейсом (например, интерфейс 8080 или 6800) с первым выходом микроконтроллера 8, а связь микроконтроллера 8 с персональным компьютером 18 обеспечивается вторым разъёмом, который является дифференциальным выходом.
Выходной сигнал в виде напряжения постоянного тока, пропорционального углу поворота наружной рамы 3 относительно корпуса, с датчика угла крена 6 (например, потенциометрического), запитанного двухполярным постоянным напряжением (например, 
Выходной сигнал в виде напряжения, пропорционального углу поворота платформы 2 относительно наружной рамы установки, с датчика угла тангажа 7, запитанный двухполярным постоянным напряжением, поступает на второй преобразователь сигналов 13, который преобразует двухполярный сигнал в однополярный, а затем поступает на второй преобразователь аналог-код 15. Этот сигнал, содержащий информацию об угле поворота платформы 2 относительно наружной рамы 3, в виде двоичного кода размером 16 бит поступает на второй последовательный цифровой вход микроконтроллера 8.
Нулевые сигналы датчика угла крена 6 и датчика угла тангажа 7 выставляются по нулям сигналов акселерометров блока 1 при настройке установки.
На дисплее 9 происходит отрисовка графических примитивов, включающих в себя полигоны земли 19 и неба 20, риски крена 21 и тангажа 22, статическую модель самолёта 23 или подвижную модель самолёта 24, указатель крена
25 и линию искусственного горизонта 26.
Установка для демонстрации микромеханического авиагоризонта решает следующие задачи:
1) определение начальных условий (начальных углов) выставки платформы по углам крена и тангажа;
2) выбор используемых параметров ориентации при вычислении углов крена и тангажа платформы, а также выбор способа индикации углового положения самолёта;
3) индикация углового положения самолёта;
4) интегрирование угловых скоростей, заданных в виде проекции вектора абсолютной угловой скорости на измерительные оси трёхканального комбинированного блока микромеханических гироскопов и акселерометров, связанной с центром масс платформы системы координат в углы крена и тангажа в нормальной системе координат;
5) проверка точности вычисленных углов крена и тангажа платформы.
Решение первой задачи происходит следующим образом. В момент подачи питания на установку, микроконтроллер 8 начинает считывать данные с трёхканального комбинированного блока микромеханических гироскопов и акселерометров 1, содержащие информацию о проекциях вектора ускорения силы тяжести Земли (ускорения свободного падения 

где 

Рассмотрим решение второй задачи.
После того, как микроконтроллер 8 сформирует начальные условия по углам выставки платформы, микроконтроллер начинает считывать дискретное значение с задатчика типа параметра ориентации 11, и, если считанное значение равно логической единице
пересчёт первичной навигационной информации осуществляется путём интегрирования «урезанных» кинематических уравнений в углах Эйлера-Крылова
в соответствии со следующей системой уравнений, получаемой из (2):
или другой вариант
Примечание: термин «урезанный» подчеркивает, что при построении установки для демонстрации авиагоризонта используется двухосный подвес.
Если же дискретное значение с задатчика типа параметра ориентации 11, считываемое микроконтроллером, равно логическому нолю
пересчёт первичной навигационной информации осуществляется путём интегрирования уравнения Пуассона:

где матрица

а матрица 
После интегрирования в микроконтроллере уравнений (4) формируется матрица 
элементы которой 
При этом полученная матрица ориентации 
Рассмотрим решение третьей задачи. После определения используемых параметров ориентации, микроконтроллер 8 считывает дискретное значение с задатчика типа индикации 10, и, если считанное значение равно логической единице

то способ отрисовки приборного горизонта на дисплее осуществляется в соответствии с видом «вид с Земли на самолет» (обратная индикация). В противном случае, если сигнал с задатчика типа индикации 10 равен логическому нолю
то способ отрисовки приборного горизонта на дисплее 9 осуществляется в соответствии с видом «вид с самолета на Землю» (прямая индикация).
Пояснение решения третьей задачи опишем путем рассмотрения движения графических примитивов в соответствии с фиг.3, фиг.4.
После определения микроконтроллером 8 дискретного значения с задатчика типа индикации 10, микроконтроллер 8 начинает передавать информацию о положениях графических примитивов, представленных позициями 19…26, в драйвер самого дисплея.
При этом, если отрисовка графических примитивов осуществляется в соответствии с фиг.3 – «вид с Земли на самолёт», тогда линия искусственного горизонта 26 будет двигаться исключительно вертикально пропорционально углу тангажа самолёта, а подвижная модель самолёта будет зафиксирована в центре изображения при этом имея возможность вращаться пропорционально углу крена самолёта относительно центра. Риски крена 21 и тангажа 22 зафиксированы на изображении и не могут вращаться или двигаться.
Если же отрисовка графических примитивов осуществляется в соответствии с фиг.4 – «вид с самолёта на Землю», тогда линия искусственного горизонта 26 будет иметь возможность вращаться пропорционально углу крена самолёта и будет двигаться вертикально пропорционально углу тангажа самолёта. При этом статическая модель самолёта 23 будет неподвижно зафиксирована относительно центра изображения и не будет иметь возможности перемещаться по вертикали или горизонтали, а также не будет иметь возможности вращаться относительно центра изображения. При помощи указателя крена 25, относительно центра изображения определяется угловое положение самолёта по крену путём пересечения указателя крена 25 с рисками крена 21. Указатель крена совершает исключительно угловое вращение, пропорциональное углу крена самолёта. Риски крена 21 и тангажа 22 зафиксированы на изображении и не могут вращаться или двигаться.
Рассмотрим решение четвёртой задачи. После определения способа отображения вычисляемых углов крена и тангажа платформы, микроконтроллер 8 начинает при начальных условиях, которые были определены в задаче 1, интегрировать угловые скорости системы уравнений (3), если дискретное значение с задатчика параметра ориентации 11 было равно логической единице, либо же микроконтроллер начинает интегрировать уравнение Пуассона (4), если дискретное значение с задатчика параметра ориентации 11 было равно логическому нолю.
Рассмотрим решение пятой задачи. Вычисленные углы крена и тангажа, полученные в ходе решения четвёртой задачи, используются как контролируемые параметры, которые сравниваются с углами, вычисляемыми в процессе работы установки по системе уравнений .
Последовательность демонстрации.
1. Установить трёхканальный комбинированный блок микромеханических гироскопов и акселерометров 1 (измерительный блок) в нулевое (начальное) положение по углам крена и тангажа. Для этого следует использовать двигатель крена 4 и двигатель тангажа 5, подав на них управляющие сигналы с задатчиков угла крена 16 и тангажа17. Контролировать начальное положение по показаниям датчика углов крена 6 и датчика углов тангажа 7, которые в цифровом виде высвечиваются на дисплее 9.
2. Задатчик типа параметров ориентации 11 установить в положение 
3. Задатчик типа индикации 10 установить, например, в положение 
4. Задать с помощью с задатчиков угла крена 16 и тангажа17 управляющие сигналы одним из вариантов: только по крену или тангажу до заданных значений (например, 20 градусов); одновременно по двум углам также до фиксированного значения; гармоническое движение по каждому углу отдельно или одновременно.
5. В микроконтроллер 8 в реальном масштабе времени будет поступать информация как с гироскопов и акселерометров измерительного блока 1, так и с датчика углов крена 6 и датчика углов тангажа 7. И одновременно решаться задача ориентации в соответствии с алгоритмами (3) или (3а), результаты которой будут записываться в файлы: kren.log – для углов крена; tang.log – для углов тангажа. Одновременно указанные файлы будут перезаписываться в память персонального компьютера 18.
6. На дисплее 9 будет в реальном масштабе времени формироваться индикация положения измерительного блока в соответствии с фиг. 3.
7. Независимо от положения задатчиков 10 и 11 в реальном масштабе времени считывается информация с акселерометров измерительного блока 1, но записываются обновляемые текущие значения, в соответствии которыми формируются значения углов крена и тангажа по формулам (1).
8. В реальном масштабе времени также будут считываться сигналы датчика углов крена 6 и датчика углов тангажа 7, значения которых являются контрольными для проверки работы алгоритмов ориентации.
9. При остановке измерительного блока 1 в произвольном положении по формулам (1) будут определены углы крена и тангажа, которые будут сравнены с углами крена и тангажа, вычисленные по алгоритмам ориентации и аппаратно в соответствии с п.8.
10. Задатчик типа индикации 10 установить в положение 
11. Для проверки работы алгоритмов ориентации в виде направляющих косинусов (4)-(6) следует повторить выполнение п.1– п.9, установив в п.3 задатчик типа параметров ориентации 11 в положение 
12. Для большей наглядности и для тренировки операторов возможно на персональном компьютере с большим экраном одновременно вывести индикацию для всех рассмотренных выше вариантов. Этот подход будет способствовать развитию навыков быстрого принятия решений при применении на самолетах различных типов авиагоризонтов с различными видами индикации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| БОРТОВАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА | 2010 |
|
RU2439584C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛЬЮ С РАДИАЛЬНОЙ КОРРЕКЦИЕЙ И БЕСПЛАТФОРМЕННАЯ ГИРОВЕРТИКАЛЬ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2659970C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ПРИБОР ЛОГИЧЕСКОЙ ИНДИКАЦИИ ПОЛОЖЕНИЯ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ В ПРОСТРАНСТВЕ (ВАРИАНТЫ) | 2006 |
|
RU2331848C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| Способ определения углов ориентации ЛА на вертикальных траекториях полета | 2017 |
|
RU2671291C1 |
| БЛОК БЕСПЛАТФОРМЕННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И ВКЛЮЧАЮЩАЯ ЕГО СИСТЕМА ВИЗУАЛИЗАЦИИ И РЕГИСТРАЦИИ ДВИЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2336496C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК АВТОНОМНОЙ, БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛИ С ИНТЕГРАЛЬНОЙ КОРРЕКЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2801620C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| АВИАГОРИЗОНТ | 2010 |
|
RU2428657C1 |
Установка для демонстрации микромеханического авиагоризонта содержит трёхканальный комбинированный блок микромеханических гироскопов и акселерометров, расположенный на платформе в кардановом подвесе, датчики углов крена и тангажа, двигатели крена и тангажа, дисплей, задатчик типа параметров ориентации, задатчики типа индикации и углов крена и тангажа, два преобразователя сигналов, два преобразователя аналог-код, микроконтроллер, персональный компьютер, соединенные определенным образом. Обеспечивается расширение демонстрационных возможностей за счет построения различных видов индикации. 4 ил. 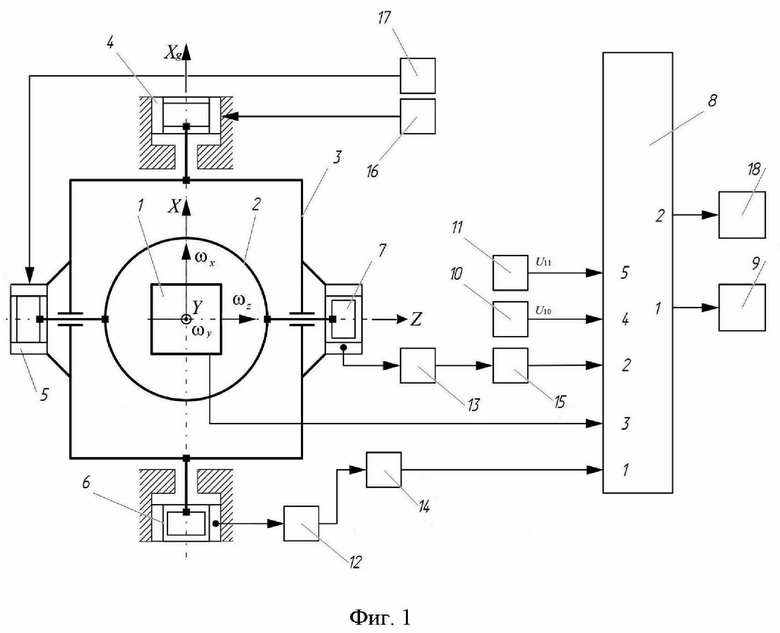
Установка для демонстрации микромеханического авиагоризонта, содержащая трёхканальный комбинированный блок микромеханических гироскопов и акселерометров, измерительные оси которых расположены ортогонально, а выходы комбинированного блока подключены на соответствующие входы микроконтроллера, отличающаяся тем, что трёхканальный комбинированный блок расположен на платформе в кардановом подвесе, с осями которого кинематически связаны датчики углов крена и тангажа и соответственно двигатели крена и тангажа, при этом установка содержит дисплей, задатчик типа параметров ориентации, задатчик типа индикации, задатчики углов крена и тангажа, подключенные своими выходами на соответствующие входы двигателей, а выходы датчиков углов крена и тангажа через последовательно соединенные первый и второй преобразователи сигналов и соответственно первый и второй преобразователи аналог-код подключены на первый и второй входы микроконтроллера, на оставшиеся входы которого подключены задатчик типа параметров ориентации, при этом если на его выходе будет логическая «единица», то в микроконтроллере будут использоваться параметры ориентации в виде углов Эйлера-Крылова, а если на его выходе будет логический «ноль», то в микроконтроллере будут использоваться параметры ориентации в виде направляющих косинусов, и задатчик типа индикации, при этом если на его выходе будет логическая «единица», то на дисплее будет сформирована индикация «вид с Земли на самолёт», а если на его выходе будет логический «ноль», то на дисплее будет сформирована индикация «вид с самолёта на Землю», а выход микроконтроллера соединен с входом дисплея.
| Тренажер для изучения авиагоризонта | 2017 |
|
RU2658554C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| US 3471627 A1, 07.10.1969 | |||
| KR 1020170036376 A, 03.04.2017 | |||
| US 8794970 B2, 05.08.2014. | |||

