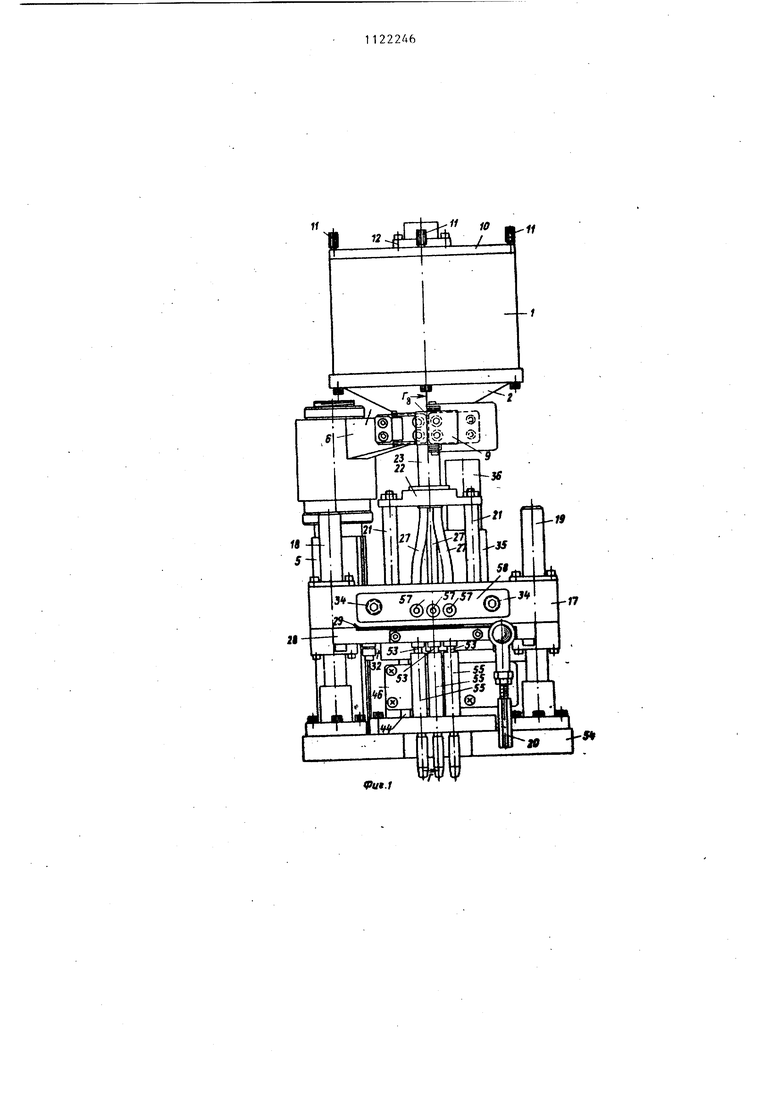
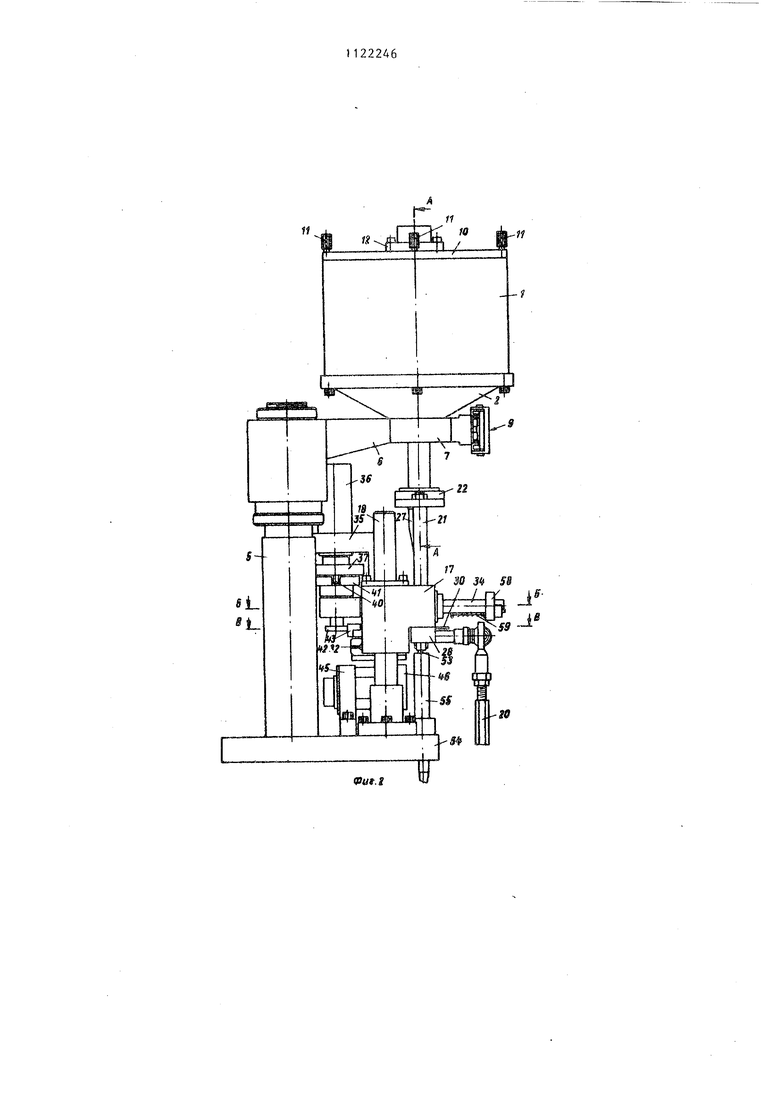
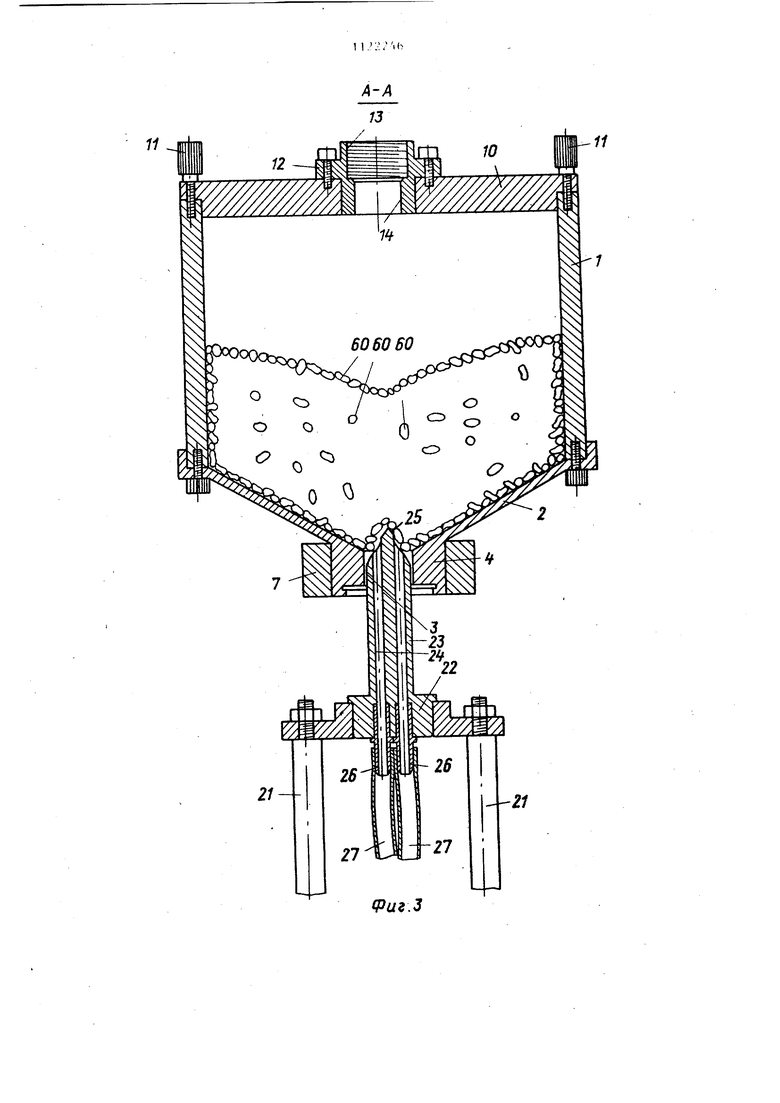
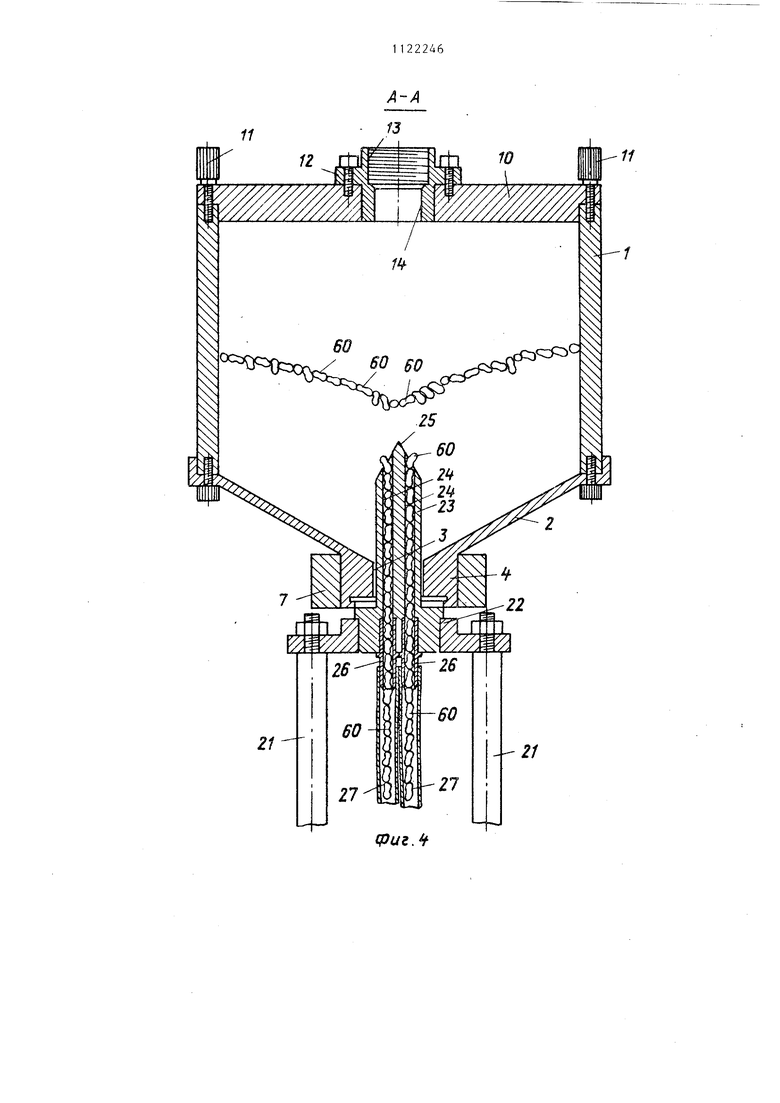
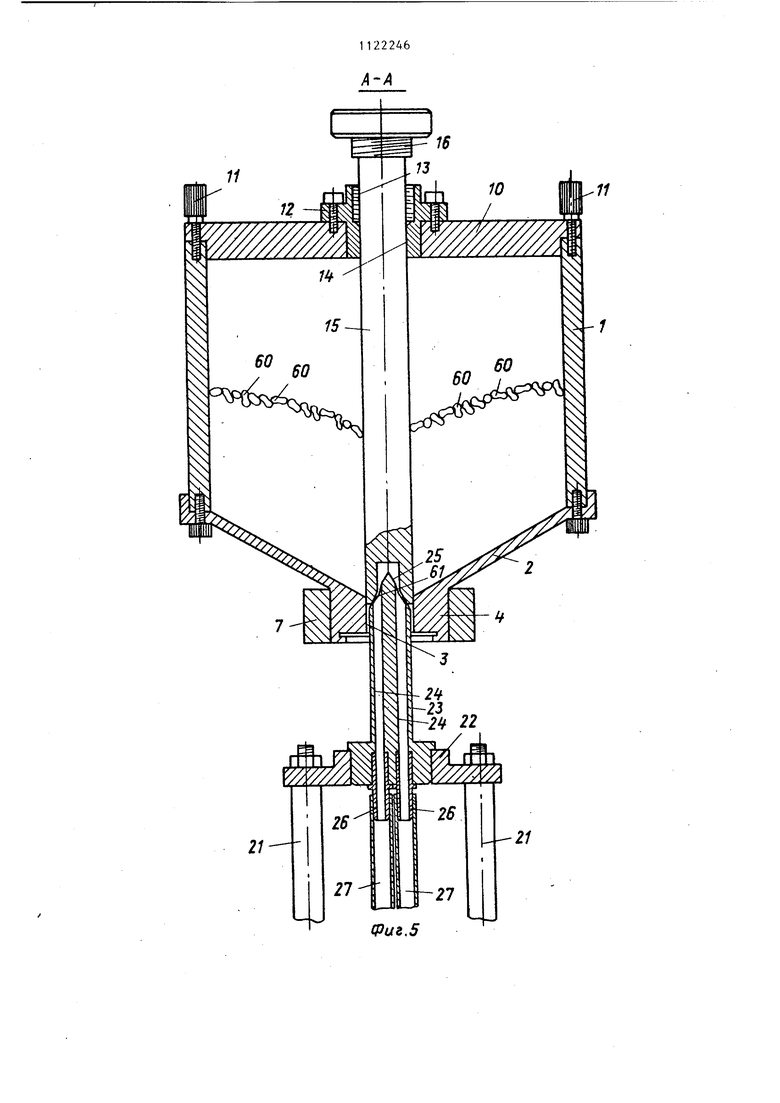
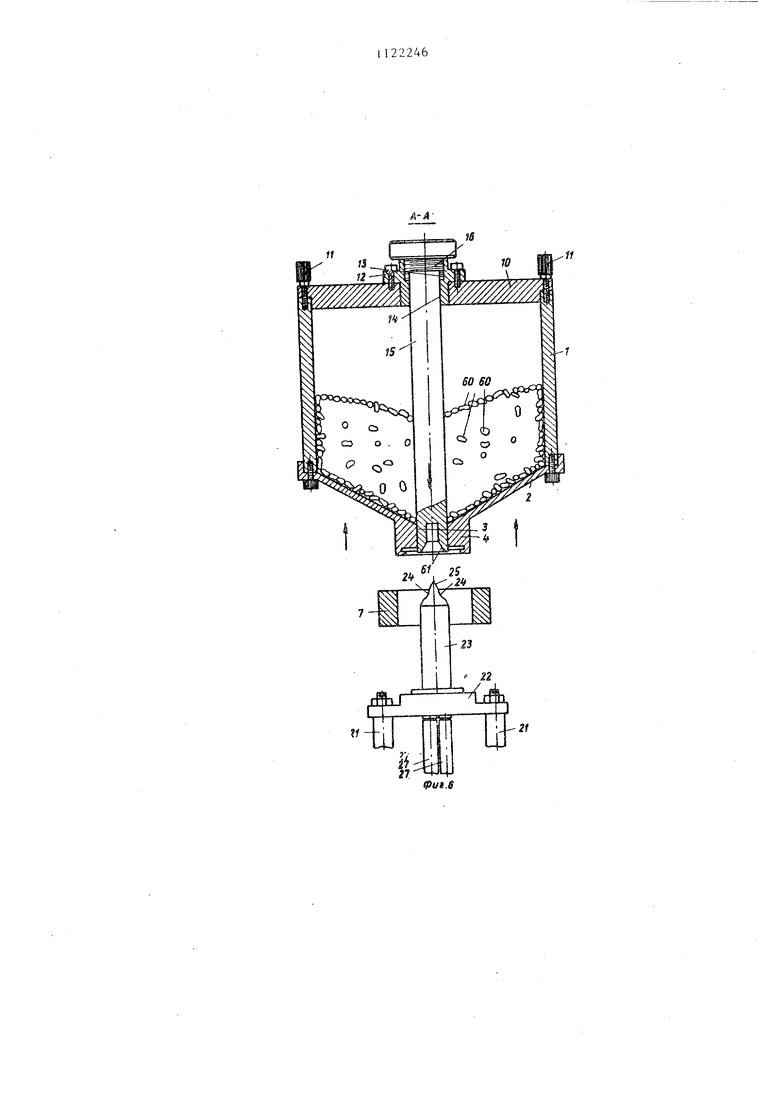
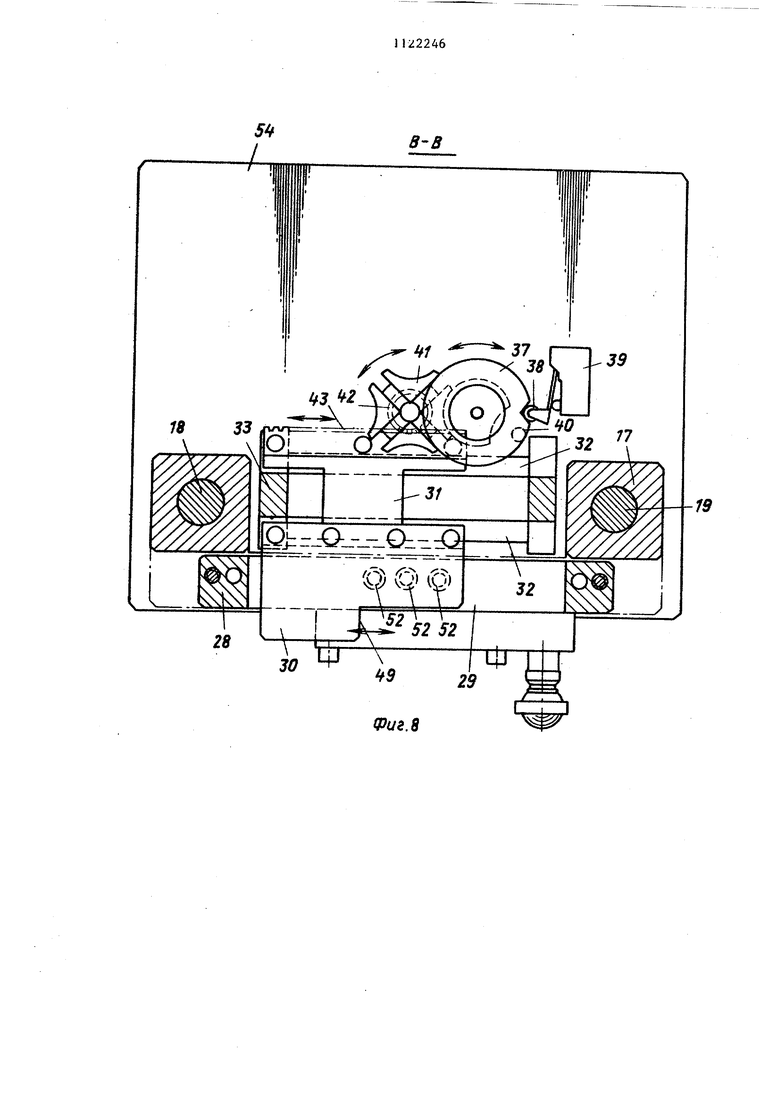
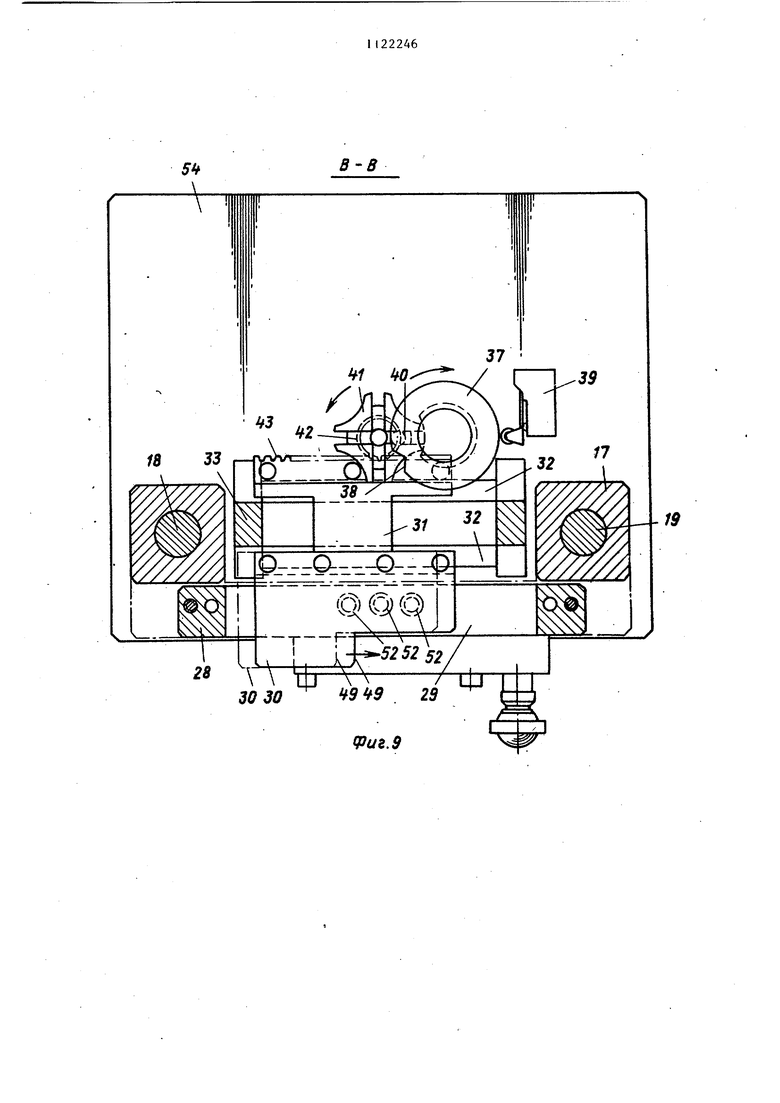
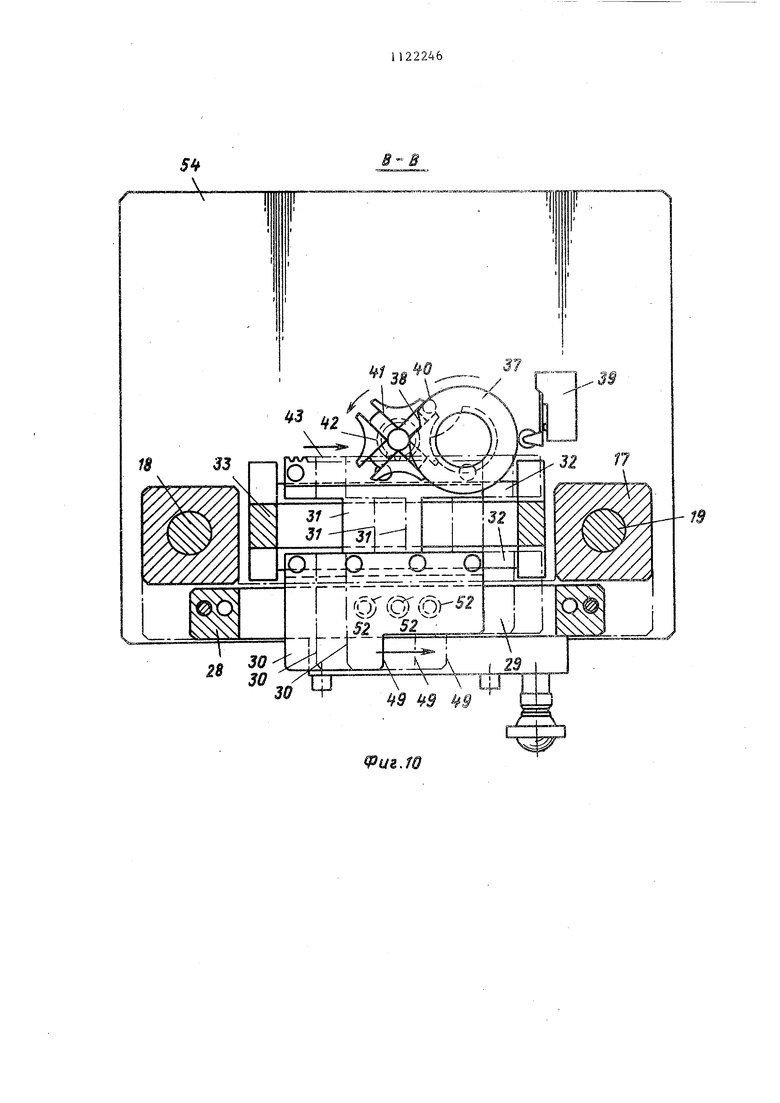
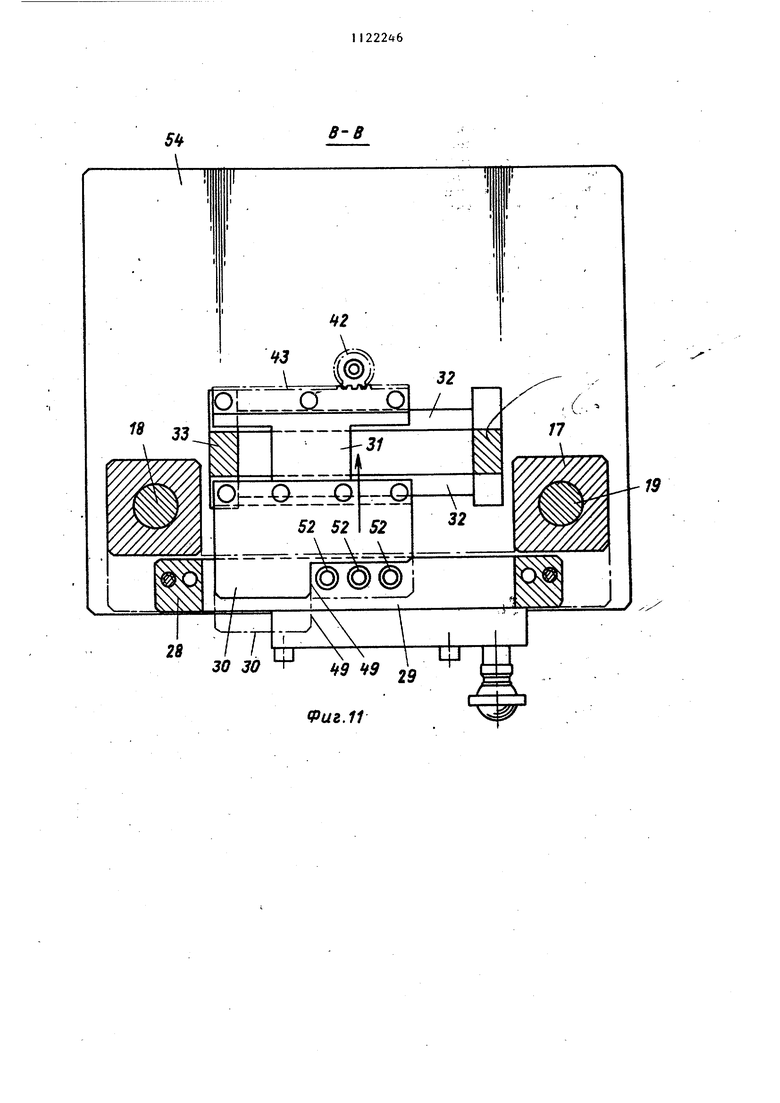
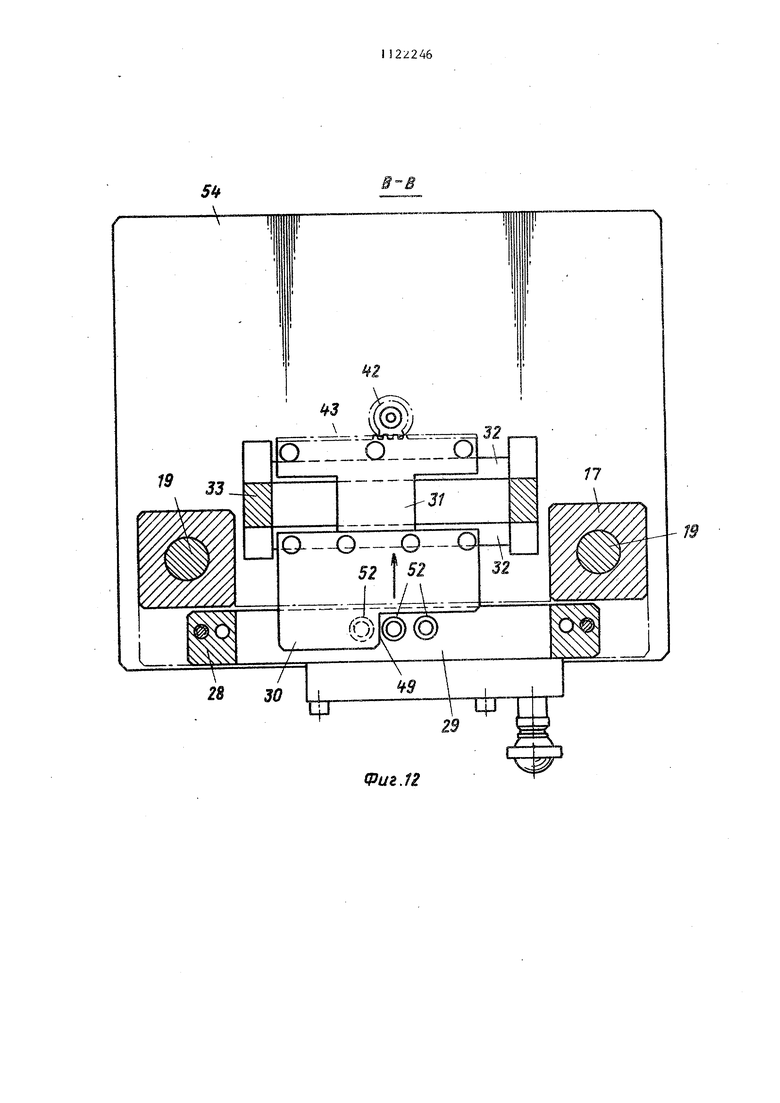
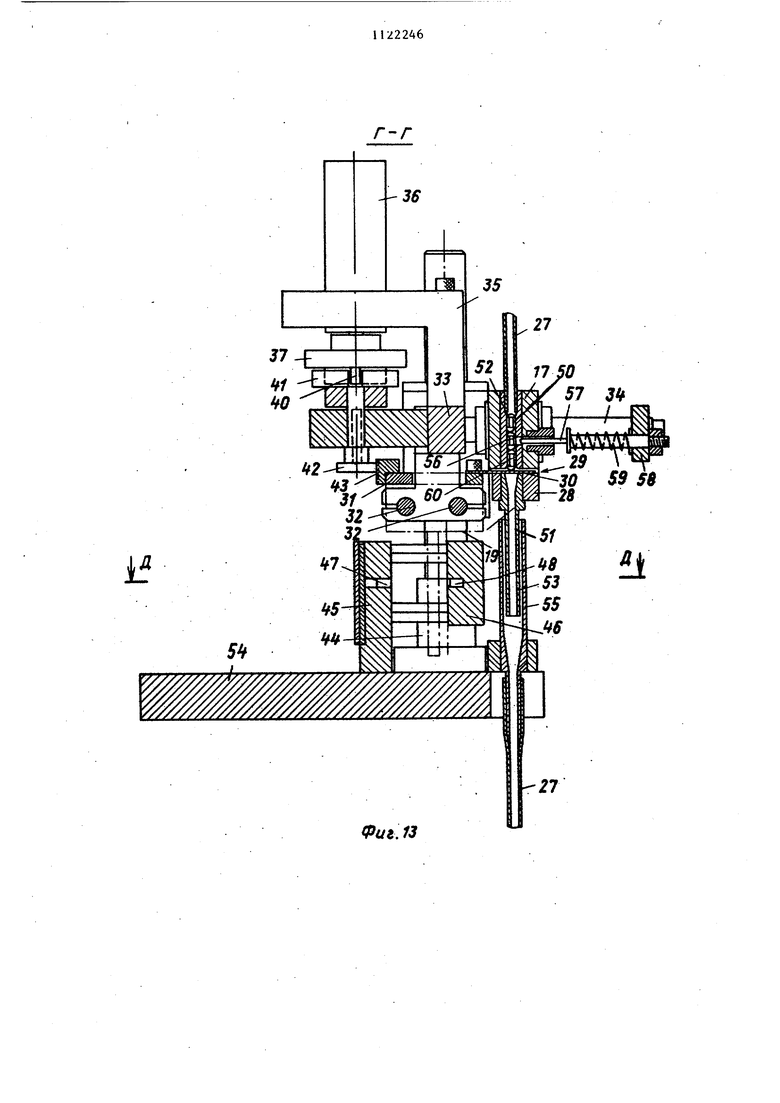
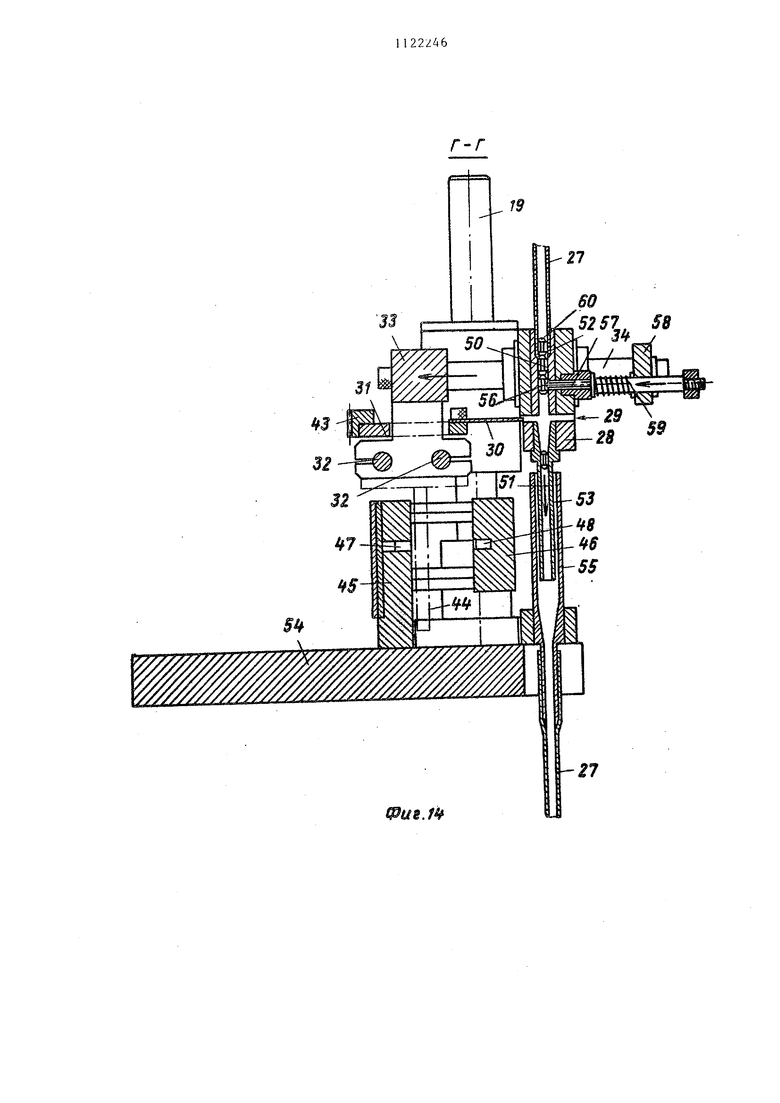
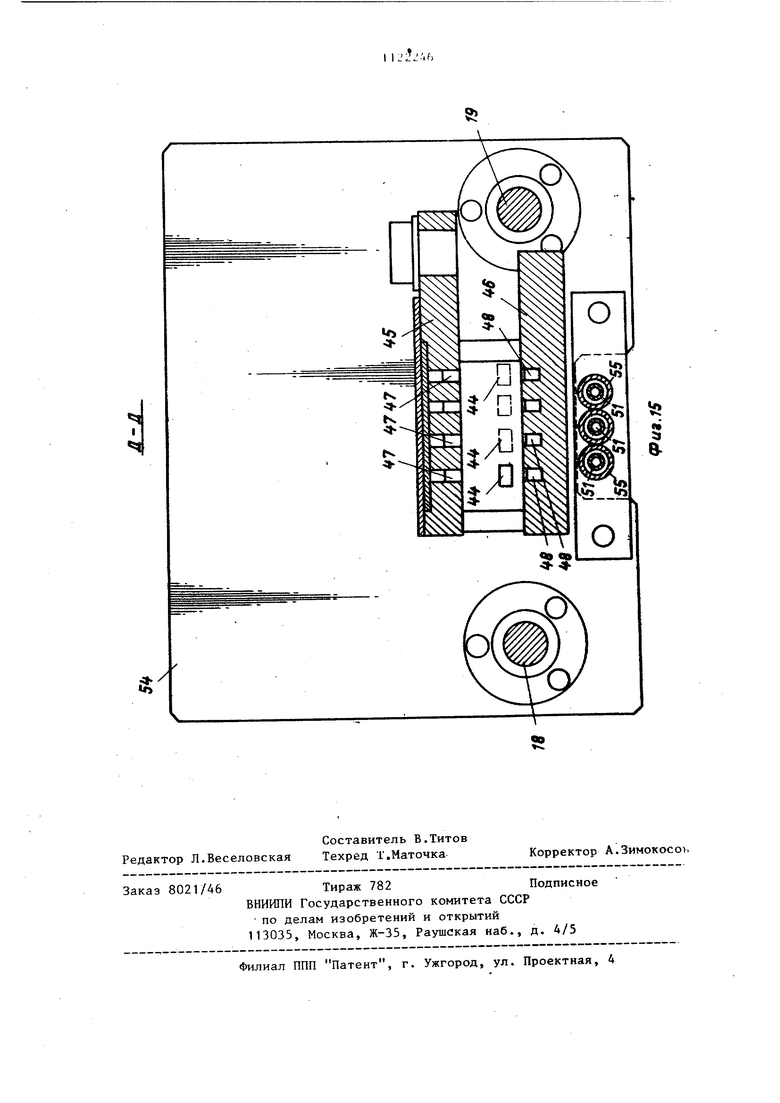
1 Изобретение относится к устройст вам для подачи элементов электричес ких схем при произвосдтве гибридных интегральных схем. Известно устройство для пошту.чно подачи радиодеталей, содержащее контейнер с конусной воронкой, в ра ной части которого установлен стержень с отверстиями с возможностью вертикального возвратно-поступатель но го перемеще.ния р1 . Однако известное устройство не обеспечивает качественной подачи элементов при вибрации Наиболее близким по техническому решению к предложенному является устройство для подачи деталей бунке ного типа, содержащее бункер для сх ных элементов, механизм передачи в виде стерл :ня с отверстиями, соедине ными с каналами для схемных элементов установленного в отверстии донной части контейнера, затворный механиз с пластиной, соединенной с приводом установленной с возможностью поперечного перемещения относительно ка налов для схемных элементов 2j . Однако известное устройство не обе печивает высокого качества подачи элементов,, Цель изобретения - повышение ка чества подачи элементов путем снижения вибраций. Поставленная цель достигается тем что в устройстве для автоматической подачи элементов электрических схем содержащем контейнер для схемньгх элементов, механизм захвата в виде стержня с отверстиями; соединенными с каналами для схемных элементов, установленного в отверстии донной части контейнера, затворный механизм с пластиной, соединенной с приводом и установленной с возможностью поперечного перемещения относительно кан лов для схемных элементов, каналы для схемных элементов размещены в од ной плоскости в ряд, а пластина затворного механизма выполнена с вы емкой, совпадающей с каналами для схемных элементов. Привод затворного механизма выпол нен в виде мальтийского механизма и установлен с возможностью селективного взаимодействия пластины затворного механизма с каналами для схемных элементов. 46 Стержень механизма захвата выполнен с количеством отверстий, соот-ветствующим числу каналов для схемных элементов. Контейнер снабжен стержнем, установленным в отверстии крышки с возможностью перекрытия отверстия в донной части контейнера. На фиг. 1 - представлено устройство для подачи элементов электрических схем, вид спереди в вертикальной проекции; на фиг. 2 - то же, вид сбоку; на фиг. 3-6 то же, разрез А-А на фиг. 2. в различных состояниях; на фиг. 7 - разрез Б-Б на фиг. 2 на фиг. 8 - разрез В-В на фиг. 2, на фиг. 9 - то же, во время регулирования количества элементов посредством сдвига затвора-, на фиг. 10 - то же, после завершения сдвига затвора; на фиг. 11 то же, при открытом затвореj на фиг. 12 - то же, при открытом состоянии затворов для подачи двух элементов, на фиг. 13 - разрез Г-Г на фиг. 1 на фиг. 14 - то же, в одном из рабочих состояний, на фиг. 15 разрез Д-Д на фиг. 13. Устройство для подачи схемных элементов содержит цилиндрический контейнер 1 для схемных элементов, выполненньй из прозрачной пластмассы, . снабженный конической донной пластиной 2 со сквозным отверстием 3 в центре. Устройство включает горловину 4 контейнера 1, стоечньш опорный элемент 5, который имеет установленный на его верхнем конце поддерживающий кронштейн 6. Кольцеобразная поддерживающая часть 7 кронштейна 6 поддерживает горловину 4 контейнера 1. Кольцеобразная поддерживающая часть 7 включает вертикально проходящую прорезь 8 и оборудуется зажимным механизмом 9 для прижима горловины 4 контейнера 1. Верхний торец контейнера 1 является открытым и закрывается дискообразной крышкой 10, съемно закрепляемой к нему посредством винтов 11. Крышка 10 в центральной части снабжена втулкой 12, выполненной с центральным сверлением 13, переходящим в сквозное сверление 14 меньшего диаметра. Снабженное резьбой сверление 13 и сквозное сверление 14 предназначены для стержня 15, крторый встав
ляется в сквозное сверление 14 и соединяется посредством ввинчивания части с наружной резьбой 16 в снабженное внутренней резьбой сверление 13. Соединенный таким образом стержень 15 проходит в сквозное отверстие 3 контейнера и закрывает донную часть.
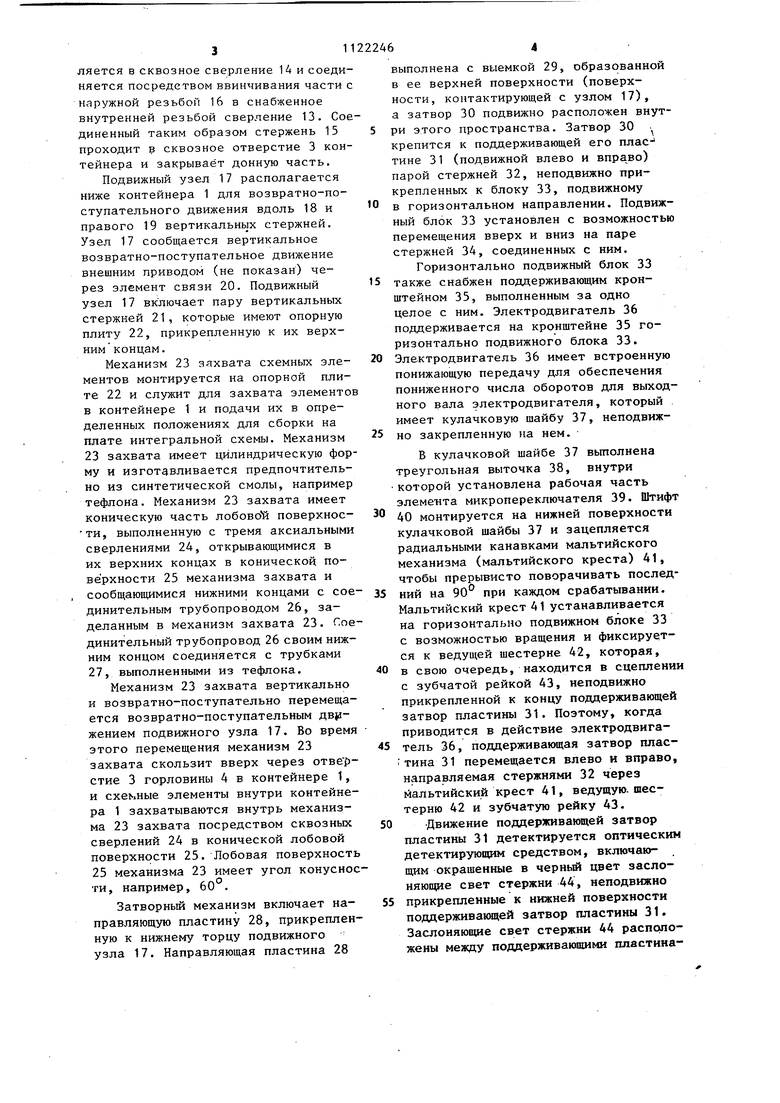
Подвижный узел 17 располагается ниже контейнера 1 для возвратно-поступательного движения вдоль 18 и правого 19 вертикальных стержней. Узел 17 сообщается вертикальное возвратно-поступательное движение внешним приводом (не показан) через элемент связи 20. Подвижный узел 17 включает пару вертикальных стержней 21, которые имеют опорную плиту 22, прикрепленную к их верхним концам.
Механизм 23 захвата схемных элементов монтируется на опорной плите 22 и служит для захвата элементо в контейнере 1 и подачи их в определенных положениях для сборки на плате интегральной схемы. Механизм 23 захвата имеет цилиндрическую форму и изготавливается предпочтительно из синтетической смолы, например тефлона. Механизм 23 захвата имеет коническую часть лобовой поверхности, выполненную с тремя аксиальными сверлениями 24, открывающимися в их верхних концах в конической поверхности 25 механизма захвата и сообщающимися нижними концами с соединительным трубопроводом 26, заделанным в механизм захвата 23. Соединительный трубопровод 26 своим нижним концом соединяется с трубками 27, выполненными из тефлона.
Механизм 23 захвата вертикально и возвратно-поступательно перемещается возвратно-поступательным двржением подвижного узла 17. Во время этого перемещения механизм 23 захвата скользит вверх через отве|)стие 3 горловины 4 в контейнере 1, и схемные элементы внутри контейнера 1 захватываются внутрь механизма 23 захвата посредством сквозных сверлений 24 в конической лобовой поверхности 25. Лобовая поверхность 25 механизма 23 имеет угол конусности, например, 60°.
Затворный механизм включает направляющую пластину 28, прикрепленную к нижнему торцу подвижного узла 17. Направляющая пластина 28
выполнена с выемкой 29, образованной в ее верхней поверхности (поверхности, контактирующей с узлом 17), а затвор 30 подвижно расположен внутри этого пространства. Затвор 30 крепится к поддерживающей его плас- тине 31 (подвижной влево и вправо) парой стержней 32, неподвижно прикрепленных к блоку 33, подвижному
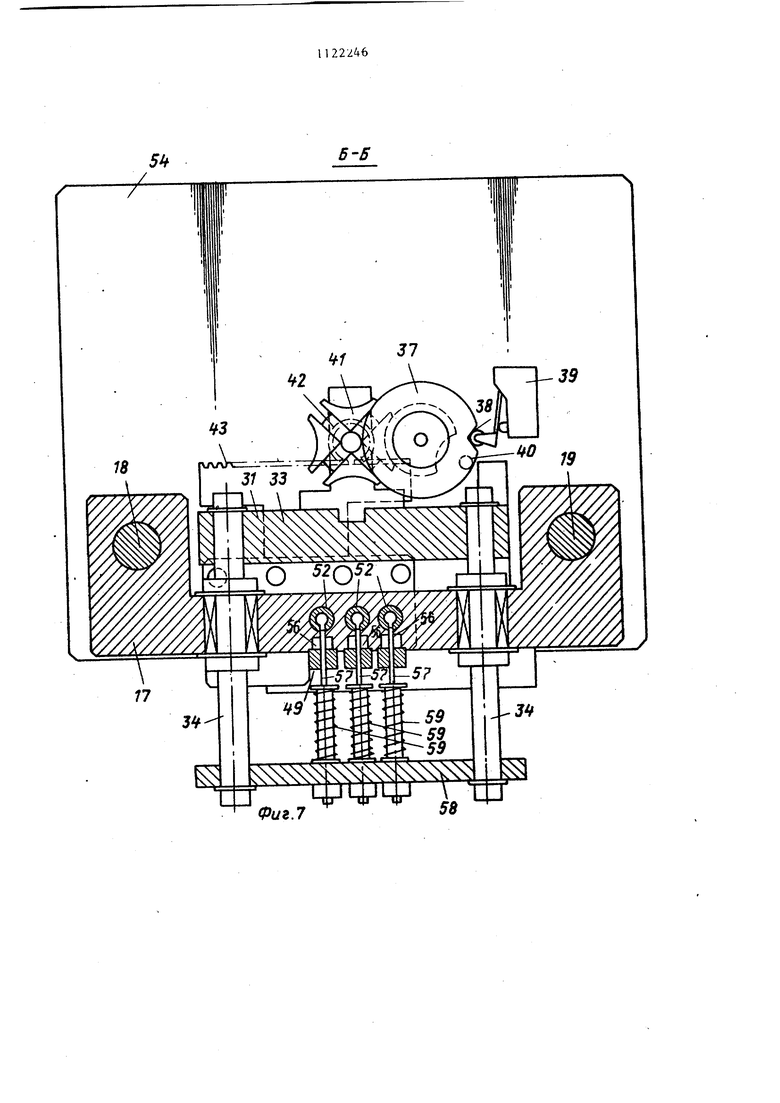
в горизонтальном направлении. Подвижный блок 33 установлен с возможностью перемещения вверх и вниз на паре стержней 34, соединенных с ним. Горизонтально подвижный блок 33
также снабжен поддерживающим кронштейном 35, выполненным за одно целое с ним. Электродвигатель 36 поддерживается на кронштейне 35 горизонтально подвижного блока 33.
Электродвигатель 36 имеет встроенную понижающую передачу для обеспечения пониженного числа оборотов для выходного вала электродвигателя, который имеет кулачковую шайбу 37, неподвижно закрепленную на нем.
В кулачковой шайбе 37 вьтолнена треугольная выточка 38, внутри которой установлена рабочая часть элемента микропереключателя 39. Штифт
40 монтируется на нижней поверхности кулачковой щайбы 37 и зацепляется радиальными канавками мальтийского механизма (мальтийского креста) 41, чтобы прерывисто поворачивать последНИИ на 90 при каждом срабатывании. Мальтийский крест 41 устанавливается на горизонтально подвижном блоке 33 с возможностью вращения и фиксируется к ведущей шестерне 42, которая,
в свою очередь, находится в сцеплении с зубчатой рейкой 43, неподвижно прикрепленной к концу поддерживающей затвор пластины 31. Поэтому, когда приводится в действие электродвигатель 36, поддерживающая затвор плас;тина 31 перемещается влево и вправо, направляемая cтepжня ш 32 через мальтийский крест 41, ведущую, шестерню 42 и зубчатую рейку 43.
Движение поддерживающей затвор пластины 31 детектируется оптическим детектирующим средством, включаю- . щим окрашенные в черный цвет заслоняющие свет стержни 44, неподвижно
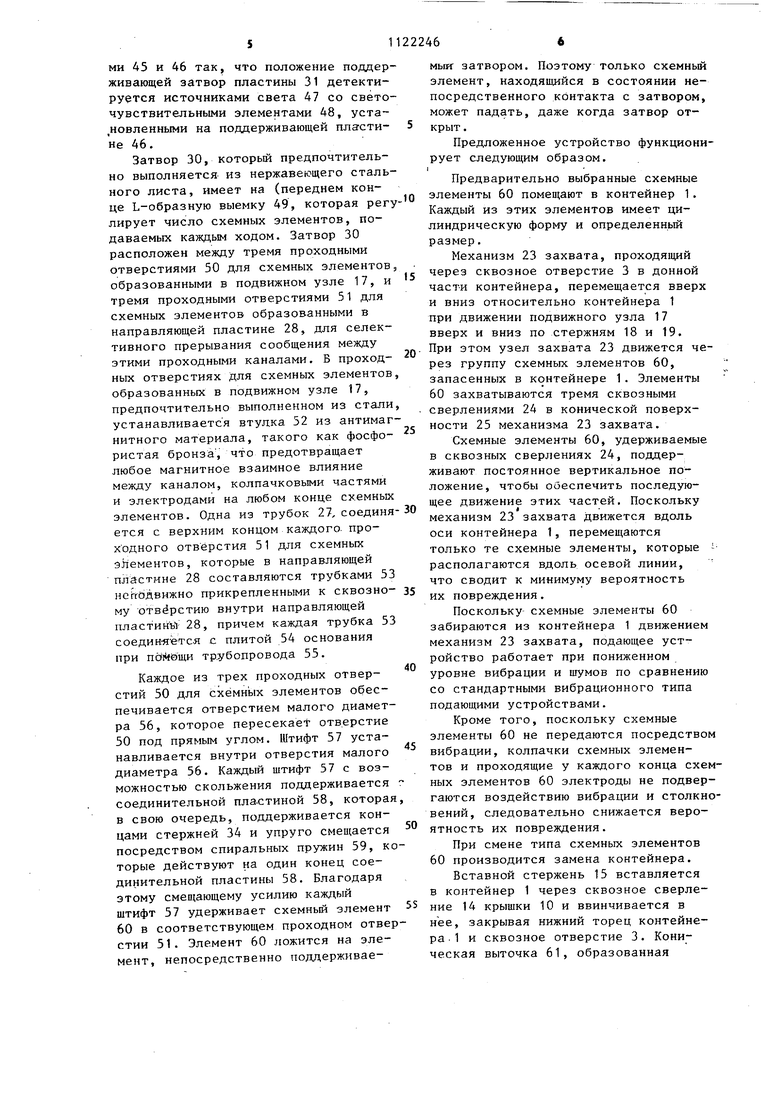
прикрепленные к нижней поверхности поддерживающей затвор пластины 31. Заслоняющие свет стержни 44 расположены между поддерживающими пластинами 45 и 46 так, что положение поддер живающей затвор пластины 31 детектируется источниками света 47 со свето чувствительнь(ми элементами 48, уста,новленными на поддерживающей пластине 46, Затвор 30, который предпочтительно выполняется из нержавеющего сталь ного листа, имеет на (переднем конце L-образную выемку 49, которая рег лирует число схемных элементов, подаваемых каждым ходом. Затвор 30 расположен между тремя проходными отверстиями 50 для схемных элементов образованными в подвижном узле 17, и тремя проходными отверстиями 51 для схемных элементов образованными в направляющей пластине 28, для селективного прерывания сообщения между этими проходными каналами. В проходных отверстиях для схемных элементов образованных в подвижном узле 17, предпочтительно выполненном из стали устанавливается втулка 52 из антимаг нитного материала, такого как фосфористая бронза, что предотвращает любое магнитное взаимное влияние между каналом, колпачковыми частями и электродами на любом конце схемных элементов. Одна из трубок 27, соединя ется с верхним концом каждого, проходного отверстия 51 для схемных элементов, которые в направляющей пластине 28 составляются трубками 53 нсггбдвижно прикрепленными к сквозному отверстию внутри направляющей пластинъ 28, причем каждая трубка 53 соедин-Яётся с плитой 54 основания при пЙ11«ещи трубопровода 55. Каждое из трех проходных отверстий 50 для схемных элементов обеспечивается отверстием малого диаметра 56, которое nepeceKaet отверстие 50 под прямым углом. Штифт 57 устанавливается внутри отверстия малого диаметра 56. Каждый штифт 57 с возможностью скольжения поддерживается соединительной пластиной 58, которая в свою очередь, поддерживается концами стержней 34 и упруго смещается посредством спиральных пружин 59, ко торые действуют на один конец соединительной пластины 58. Благодаря этому смеп1ающему усилию каждый штифт 57 удерживает схемный элемент 60 в соответствующем проходном отвер стии 51. Элемент 60 ложится на элемент, непосредственно поддерживаемьпт затвором. Поэтому только схемньй элемент, находящийся в состоянии непосредственного контакта с затвором, может падать, даже когда затвор открыт . Предложенное устройство функционирует следующим образом. I Предварительно выбранные схемные элементы 60 помещают в контейнер 1. Каждый из этих элементов имеет цилиндрическую форму и определенный размер. Механизм 23 захвата, проходящий через сквозное отверстие 3 в донной части контейнера, перемещается вверх и вниз относительно контейнера 1 при движении подвижного узла 17 вверх и вниз по стержням 18 и 19. При этом узел захвата 23 движется через группу схемных элементов 60, запасенных в контейнере 1. Элементы 60 захватываются тремя сквозными сверлениями 24 в конической поверхности 25 механизма 23 захвата. Схемные элементы 60, удерживаемые в сквозных сверлениях 24, поддерживают постоянное вертикальное положение, чтобы обеспечить последующее движение этих частей. Поскольку механизм 23 захвата движется вдоль оси контейнера 1, перемещаются только те схемные элементы, которые располагаются вдоль осевой линии, что сводит к минимуму вероятность их повреждения. Поскольку схемные элементы 60 забираются из контейнера 1 движением механизм 23 захвата, подающее устройство работает при пониженном уровне вибрации и шумов по сравнению со стандартными вибрационного типа подающими устройствами. Кроме того, поскольку схемные элементы 60 не передаются посредством вибрации, колпачки схемных элементов и проходящие у каждого конца схемных элементов 60 электроды не подвергаются воздействию вибрации и столкновений, следовательно снижается вероятность их повреждения. При смене типа схемных элементов 60 производится замена контейнера. Вставной стержень 15 вставляется в контейнер 1 через сквозное сверлеие 14 крышки 10 и ввинчивается в ее, закрывая нижний торец контейнеа . 1 и сквозное отверстие 3. Кониеская выточка 61, образованная в нижнем конце вставного стержня 15 плотно садится на конический конец механизма 23 захвата и предупреждае дальнейшую подачу каких-либо схемны элементов. Затем ослабляется зажимной механизм 9, и контейнер 1 осторожно снимают в .аксиальном направлении, освобождая из зажимного механизма 9. Затем производят установку друго контейнера, повторяя описанные операции в обратном порядке. После вытягивания вставного стер ня 15 новый контейнер 1 поддерживается опорной частью 7 поддерживающе го кронштейна 6, и зажимной механиз 9 затягивается, фиксируя новый контейнер 1 . Таким образом, исключается необходимость в разгрузке контейнеров и загрузке их другими типами схемны элементов. Схемные элементы 60 берутся из контейнера 1 механизмом 23 захвата и перемещаются к положению затворного меха 1изма под действием силы тяжести по трубке 27. Эти элементы последовательно передаются к следую щей стадии рабочего процесса откры.тием и закрытием затвора 30..При этом горизонтально подвижный блок 33 приводится в действие приводным средством (не показано) и перемещается в горизонтальном направлении относительно подвижного узла 17, поскольку стержни 34, неподвижно прикрепленные к горизонтально подвиж ному блоку 33, направляются и поддерживаются для свободного скользящего движения относительно узла 17 Так как горизонтально подвижный блок 33 несет на себе поддерживающ.ую затвор пластину 31 через пару стержней 32, движение его в аксиаль ном направлении стержней 34, т.е... вверх, вынуждает поднятие поддерживающей затвор пластины 31. Вследствие этого кромка затвора 30 вьюодится из положения, соответствующего проходному отверстию 50 для элементов, таким, образом, что три проходных отверстия 50 и три проход ных отверстия 51 могут сообщаться друг с другом. Три проходных отвер стия 51 сообщаются.с тремя проходн ми сверлениями 24 механизма 23 захвата, поэтому элементы, введенн в проходные отверстия 50 механизма захвата, могут свободно падать в соответствующие проходные отверстия для элементов 60, причем каждое про- ходное отверстие 50 для элементов 60 подает только один элемент 60, когда открывается затвор 30. Таким образом, когда горизонтально подвижный блок 33 перемещается, открывая затвор 30, соединительная пластина 58, соединенная с концами стержней 34, неподвижно прикрепленных к блоку 33, перемещается влево, сжимая спиральную пружину 59. В результате штифт 57 перемещается влево упругим сдвигающим усилием пружины 59, прижимая элемент 60, который находится непосредственно над элементом 60, находящимся на самом затворе 30, к стенке проходного отверстия 50. Таким образом, второй и следукмцие элементы 60 предупреждаются от падения на затвор 30 и только один схемный элемент сбрасывается в проходное отверстие 51 для элементов 60. . Число схемных элементов, подаваемых за один ход затвора 30, может меняться в зависимости от требований от нуля до трех. Электродвигатель 36 запускается, когда мальтийский крест 41 поворачивается посредством кулачковой шайбы 37 и штифта 40. Поворот на 90 мальтийского креста 41 перемещает поддерживающую затвор пластину 31 в продольном направлении стержней 32 благодаря действию ведущей шестерни 42 и зубчатой рейки 43 на расстояние, соответствующее одному щагу проходных отверстий 50 и 51 для элементов. Поскольку затвор 30 включает L-образную выемку 49, только двум группам проходных отверстий 50 и 51 для элементов из трех позволяется сообщаться друг с другом, когда затвор 30 перемещается горизонтально подвижным блоком 33 в направлении открытия, т.е. вверх. В результате два схемных элемента 60 подаются одним ходом затвора 30. Смещение положения затвора 30 для регулирования числа схемных элементов, которое должно подаваться, достигается приведением в действие мальтийского креста 41 посредством электродвигателя 36. Смещение затвора 30 точно детектируется, когда заслоияющий свет стержень 44 заслоняет свет, испускаемьй соответствующим источником, поэтому затвор 30 останавливается в точно определенном положении. Мальтийский крест 41 поворачивается на 90, когда кулачковая шайба 37 делает один полный оборот, и завершение одного полного оборота кулачковой шайбы детектируется взаимодействием выточки 38 кулачковой шайбы 37 и микропереключателя 39.
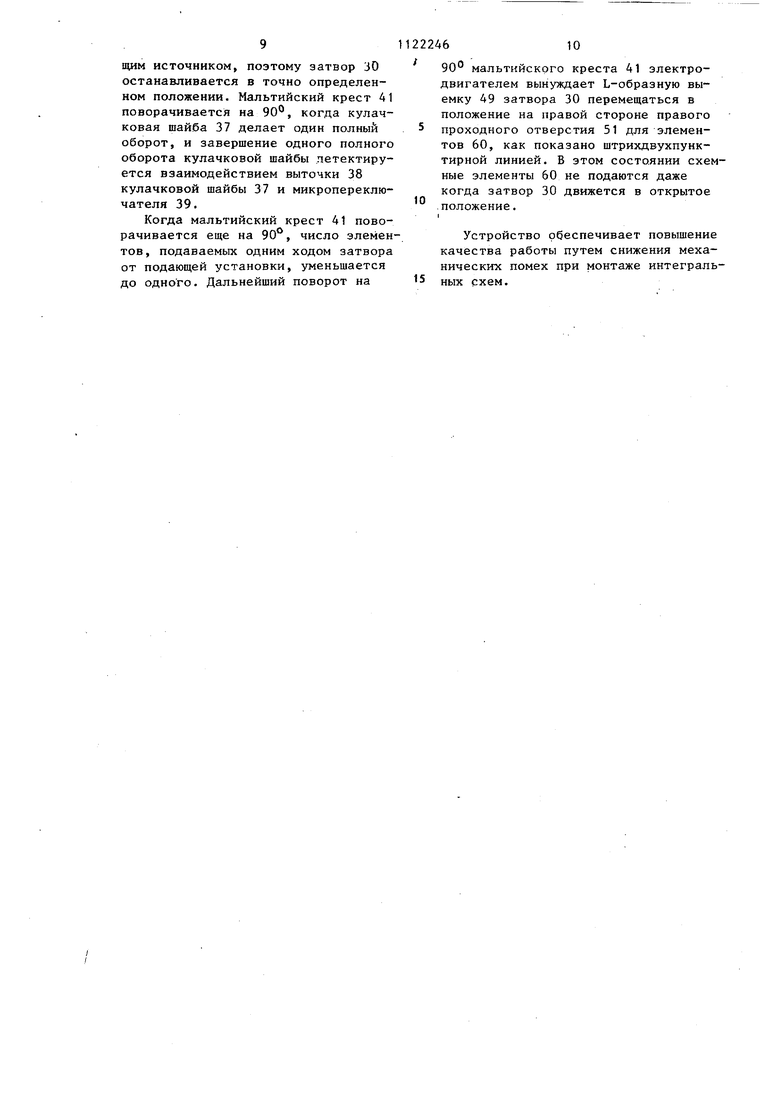
Когда мальтийский крест 41 поворачивается еще на 90°, число элемен тов, подаваемых одним ходом затвора от подающей установки, уменьшается до одного. Дальнейший поворот на
12224610
90 мальтийского креста 41 электродвигателем вынуткдает L-образную выемку 49 затвора 30 перемещаться в положение на правой стороне правого 5 проходного отверстия 51 для элементов 60, как показано штрихдвухпунктирной линией. В этом состоянии схемные элементы 60 не подаются даже когда затвор 30 движется в открытое
10 положение.
Устройство обеспечивает повышение качества работы путем снижения механических помех при монтаже интеграль 5 ных схем.
11
Vut.t
ff
(Pus.S
11
ff/ 2S
24 ,2f
fcSN 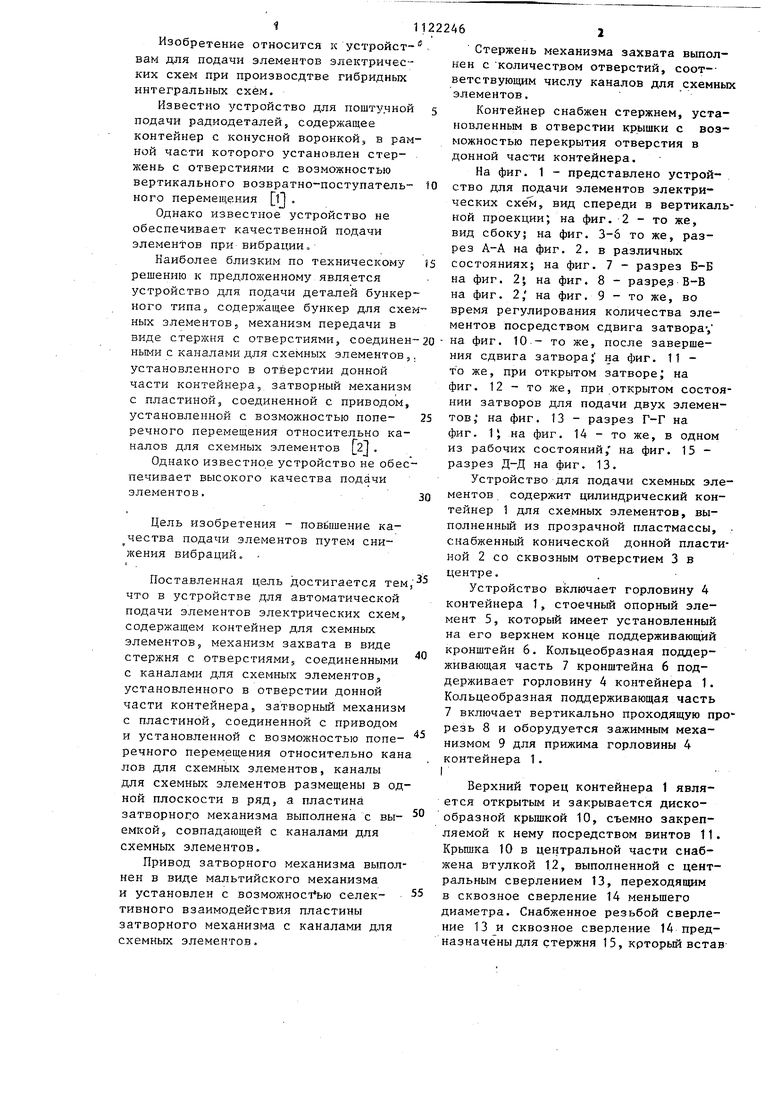
1. УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ПОДАЧИ ЭЛЕМЕНТОВ ЭЛЕКТРИЧЕСКИХ СХЕМ, содержащее контейнер для схемных элементов механизм захвата в виде стержня с отверстиями, соединенными с каналами для схемных элементов, установленного в отверстии донной части контейнера, затворный механизм с пластиной, соединенной с приводом и установленной с возможностью поперечного перемет щения относительно каналов для схемных элементов, отличающ е е с я тем, что, с целью повышения качества подачи элементов путем снижения вибраций, каналы для схемных элементов размещены в одной плоскости в ряд, а пластина затворного механизма выполнена с выемкой, совпадающей с каналами для схемных элементов. 2.Устройство по п. 1, о т л ич а ю щ е е с я тем, что привод затворного механизма выполнен в виде мальтийского механизма и установлен с возможностью селективного взаимодействия пластины затворного механизма с каналами для скемных СО элементов. 3.Устройство по п. 1, отличающееся тем, что стержень механизма захвата выполнен с количеством отверстий, соответствукяцим числу каналов для схемных элементов. 4.Устройство по п. 1, отличающееся тем, что контейнер N0 снабжен стержнем, установленным в э отверстии крыщки с возможностью перекрытия отверстия в донной части контейнера.
fPui.B
tPuz.ll
19
54
-Л.
, k-.S
32 H
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ однопрокатной многокрасочной печати | 1961 |
|
SU139668A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кожевников С.Н | |||
| Механизмы | |||
| Справочное пособие | |||
| Машиностроение, 1976, с | |||
| Прибор для выемки образцов подводного грунта | 1924 |
|
SU760A1 |
| Насос | 1917 |
|
SU13A1 |
