1C ю
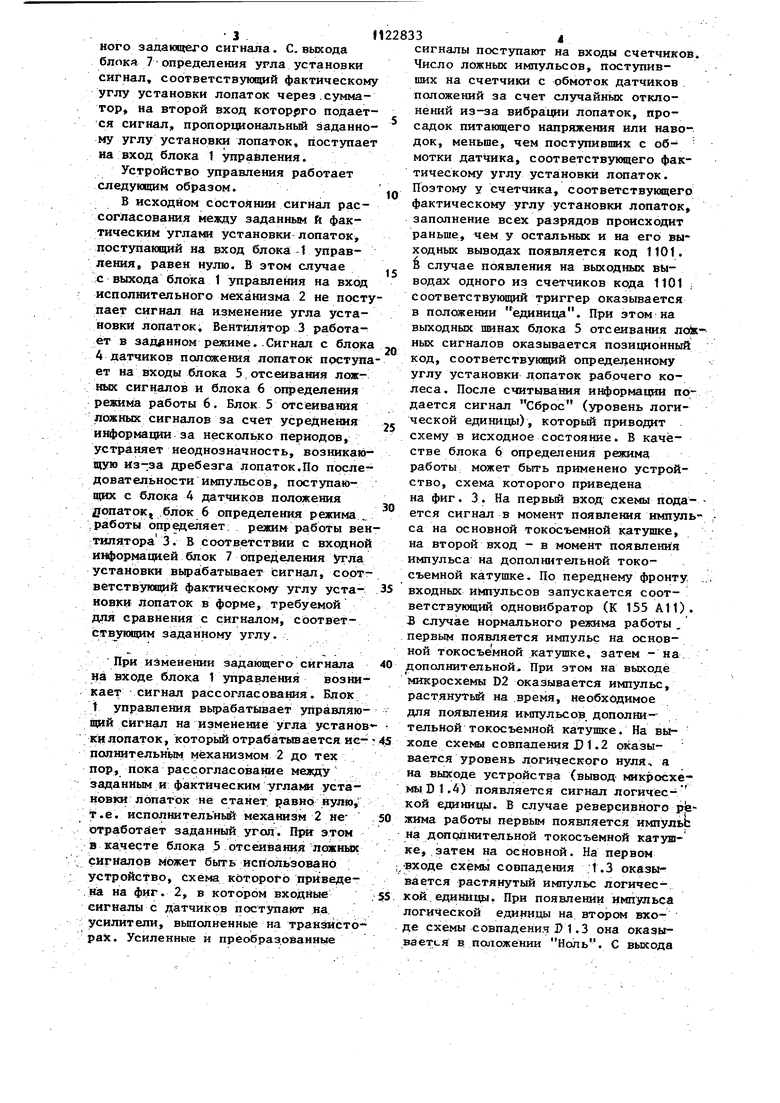
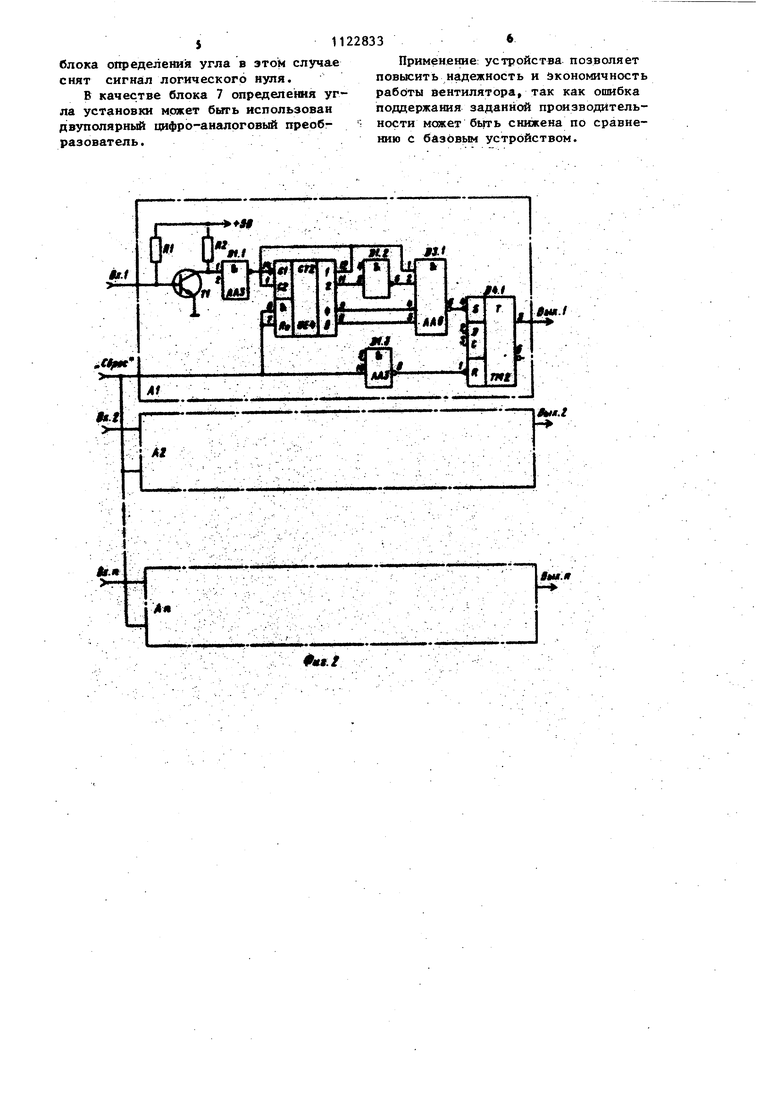
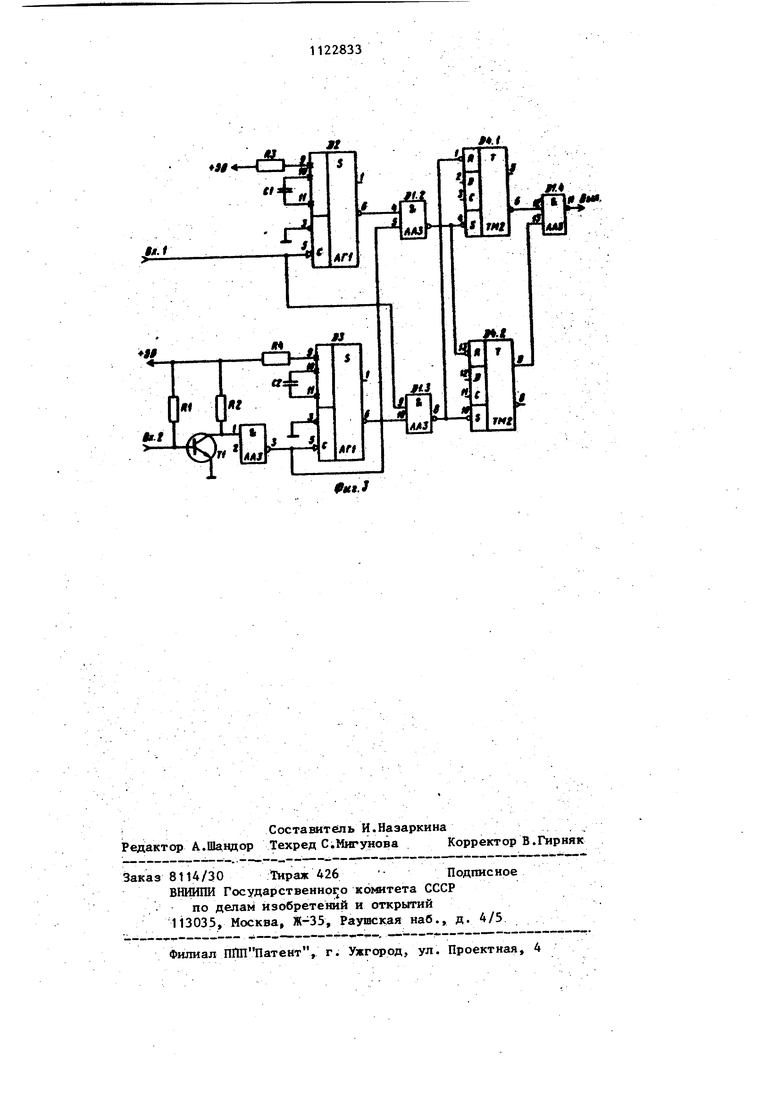
00 00 со Изобретение относится к управлению р ежимом работы вентиляторной установки и может быть использовано для автоматического регулирования, и управления работой осевого вентилятора с поворотнь ш на ходу лопатка Известны устройства автоматического упраэления вентйлятсфной устано кой, содержащие вентилят.ор, испоя1штельный механизм и блок датчиков CtД Однако устройство не позволяет отрабатывать заданный угол, установки JionayoK, что требуется при экспериментальном исследовании и определеНИИ ресурса вентилятора с noBop6Tia n« на ходу лопатками. Наиболее близким к изобретению ПС хнической сущности является устройство управления, режимом Вентилятора с поворотнюш на ходу лопатками, содержащее последовательн соединенные блок управления, испад нительный механизм и блок датчиков положения. Для изменения режикт работы сигнал с блока управления поступает на механизм поворота лопаток направляющего аппарата вентилятора, который перевода1т лопатки в одно из край- них положемий. При этом сигнал с блока датчиков, состоящего из конечных выключателей, поступает на вход блока управления, который отключает механизм поворота лопаток С2}. Однако в устройстве управления режимом работы вентилятора с поворотными на ходу рабочими лопаткаьш необходимо контролировать не только крайние, но также промежуточные и реверсивные положения лопаток. Ис. пользование для этой цели контакт ных датчиков в блоке датчиков положения лопаток нецелесообразно, так kaK требует применений контактных колец, число которых .возрастает с увеличением числа контролируемых по ложений лопаток.Это приводит к значительному усложнению схемы и сниже нию надежности работы устройства. ; Делыр изобретения является повышение точности подДержа1шя режима ра боты устройства. . Поставленная цель достигается тем что в устройство управления режимом работы вентилятора с поворотньми на ходу лопатками содержащее блок датчиков положения лопаток и последова тельно соединенные блок управления и исполнительный механизм введены сумматор, блок отсеивания ложных сигнаЛов, блок определения режима работы и блок шределения угла установки лопаток, при этом пе,ый выход бло ка датчиков положения лопаток соединен с блоком, определения угла установки через блок отсеивания ложных сигналов, а второй - через блок определения режима работы, выход блока определения угла установки лопаток подключен к первому входу суь маТорв, второй вход которого соединен с задатчиком угла поворота, а выход сумматора подключен к входу блока управления. -На фиг. 1 представлена блок-схема предлагаемого устройства, на Фиг. 2 - блок отсеивания ложньк сигналов, на фиг г 3 - блок определения режима работы. Устройство управления содержит блок 1 управления, выход которого через исполнительный механизм 2 соеданен с вентилятором 3. Вентилятор 3 соединен с входом блока 4 датчиков иЬложеиия лопаток 33f Возникакшдай при работе вентилятора 3 дребезг лопа(ток не позволяет однозначно определить угол установки лопаток. С целью нсклкмения возможности получения ЛОЖНОЙ информации, в устройство управления введен блок 3 отсеивания ложных сигналов, вход которого сое;данен с одним из выходов блока 4 датчиков положения лопаток. При работе вентилятора 3 величина выходного напряжения бесконтактного датчика не позволяет определить режим работы вентилятора, так как при нормальном и реверсивном режимах работы сигналы с бесконтактного датчика одинаковы по величине. Поэтому в устройство управления введен блок 6 определения режима рабоТы, Которьгй по последовательности сигналов, поступивпмх с блока датчика положения лопаток 4, определяет режям работы вентилятора 3. Выход блока 5 отсеивания ложных сигналов и вькод блока 6 определения режима работы соедщнены с входами блока 7 определения угла установки. Блок 7 определения угла установки по информации, поступившей с выхода блока 5 отсеивания ложных игНШ1ОВ и выхода блока 6 определения работы, Ьпределяет угол установки лопаток и преобразует сигнал в форму, соответствующую форме входнего задающего сигнала. С. выхода блока 7 определения угла установки сигнал, соответствующий фактическом углу установки лопаток через.сумматор на второй вход которого подает ся сигнал, пропорциональный заданно му углу установки лопаток, поступае на вход блока 1 упрайления. Устройство управления работает следующим образом. В исходном состоянии сигнал рассогласования между заданным и фактическим углами установки-лопаток, поступаюощй на вход блока:-1 управления, равен нулю. В этом случае ;С выхода блока 1 управления на вход исполнительного механизма 2 не пост пает сигнал на изменение угла установки лопаток; Вентилятор 3 работает в заданном режиме..Сигнал с блока 4 датчиков положения лопаток поступа ет на входы блока 5 отсеивания ложных сигналов и блока 6 определения режима работы 6. Блок 5 отсеивания ложных сигналов за счет усреднения информации за несколько периодов, устраняет неоднозначность, возникаю щую Из-:за дребезга лопаток,По после довательности импульсов, поступающих с блока 4 датчиков положения допат ок J . б л ок 6 рпредел е ния р ежима ,. .работы определяет: режим работы ве тилятора 3. В соответствии с входной инфор14а1Д{ей блок 7 определения угла установки вырабатывает сигнал, соот ветствующий фактическому углу установки лопаток в форме, требуемой для сравнения с сигналом, соответствующим заданному углу. При изменении задающего сигнала на входе блока 1 управления возни кает сигнал рассогласования. БЛОК t управления вырабатывает управляю щий сигнал на изменение угла установ ки лопаток, который отрабатывается исполнительньм механизмом 2 до тех пор, пока рассогласование между заданным и фактическим установки лопаток не станет, равно нулю,т.е. исполнительный механизм 2 неотработйет заданный угол. При этом в качесте блока 5 отсеивания ложных сигналов может быть использовано ; устройство, схема которого приведена на Фиг. 2, в котором входные сигналы с д1атчиков поступают на усилители, выполненные на транзистоpax. Усиленные и преобраз.ованные 34 сигналы поступают на входы счетчиков. Число ложных импульсов, поступивших на счетчики с обмоток датчиков положений за счет случайн1ях отклонений из-за вибрации лопаток, просадок питаклцего напряжения или наводок, меньше, чем поступивпнх с обмотки датчика, соответствующего фактическому углу установки лопаток. Поэтому у счетчика, соответствующего фактическому углу установки лопаток, заполнение всех разрядов происходит раньше, чем у остальных и на его выходных выводах появляется код 1101. 6 случае появления на выходных выводах одного из счетчиков кода 1101 ; соответствукиций триггер оказывается в положении едо1Ница. При этом на выходных шинах блока 5 отсеивания лсйкных сигналов оказывается позиционный код, соответствующий определенному углу установки лопаток рабочего колеса. После считывания информации подается сигнал Сброс (уровень логической единицы), который приводит схему в исходное состояние. В качестве блока 6 определения режима работы может быть применено устройство, схема которого приведена на фиг. 3. На первый вход схемы пода- ется сигнал в момент появления импульса на основной токосъемной катушке, на второй вход - в момент появления импульса на дополнительной токосъемной катушке. По переднему фронту .. входных импульсов запускается соответствующий одновибратор (к 155 А11). В случае нормального режима работы , первым появляется импульс на основной токосъемной катушке, затем - на дополнительной При этом на выходе микросхемы D2 оказывается импульс, растянутьй на время, необходимое для появления импульсов дополнительной токосъемной катушке. На выходе совпаденияD1.2 оказывается уровень логического нуля, а на выходе устройства (вывод микросхемы D1.4) появляется сигнал логической единицы. В случае реверсивного ре жима работы первым появляется импульЬ на дсэтрпнительной токосъемной катушке, затем на основной. На первом входе схемы совпадения 1.3 оказывается растянутый импульс логической едини . При появлении импульса логической единицы на втором вхо- де схемы совпадени.ч D1.3 она оказывается S положении Ноль. С выхода
S1122833
блока о1феделения угла в этон случае снят сигнал логического нуля.
В качестве блока 7 опредепе1№я угла установки мржет быть использован двуполярный цифро-аналоговый преобразователь.
Применение: устройства позволяет повысить надежность и экономичность работы вентилятора, так как ошибка поддержания заданной производительности может быть снюкена по сравнению с базовым устройством.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ВЕНТИЛЯТОРНОЙ УСТАНОВКИ | 1996 |
|
RU2129688C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1990 |
|
SU1760797A1 |
| Устройство управления режимом работы вентиляторной установки | 1984 |
|
SU1180534A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЗАПАСОВ УСТОЙЧИВОСТИ ЛОПАТОК ВЕНТИЛЯТОРА | 1991 |
|
RU2031388C1 |
| Устройство управления режимом работы вентиляторной установки | 1986 |
|
SU1413248A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ВЕНТИЛЯТОРНОЙ УСТАНОВКИ | 2008 |
|
RU2402683C2 |
| Устройство для контроля режима работы вентилятора | 1983 |
|
SU1109540A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ВЕНТИЛЯТОРНОЙ УСТАНОВКИ | 1992 |
|
RU2064587C1 |
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ОБМОТОК ТЯГОВЫХ ЭЛЕКТРИЧЕСКИХ МАШИН ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2251779C2 |
| СПОСОБ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ САМОЛЕТА | 2005 |
|
RU2306446C1 |
УСТРОЙСТВО УПРАВЛЕНИЯ РЕЖИМШ РАБОТЫ ВЕНТИЛЯТОРА С ПОВОРОТНЫМИ НА ХОДУ ЛОПАТКАМИ, содержащее блок датчиков положения лопаток и последовательно соединенные блок управления и исполнительный механизм, отличающееся тем, что, с целью повышения точности поддержания режима работы устройства, в него введены сумматор, блок отсеивания ложных сигналов, блок определения режима работы и блок определения угла установки лопаток,, при этом первый выход блока датчиков, положения лопаток соединен с блокам определения угла установки через блок отсеивания ложных сигналов, a второй - через блок определения режима работы, выход блока определения угла установки лопаток подключен к первому входу 9 сумматора, второй вход которого динен с задатчиком угла поворота, a выход сумматора подключен к входу блока управления.
IH
ии
0Ш.1
лн.г
вли.я
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство управления режимом работы вентилятора главного проветривания | 1974 |
|
SU613123A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и др | |||
| Машинист вентиляторной установки М.,Недра,, 1979, с | |||
| Способ приготовления кирпичей для футеровки печей, служащих для получения сернистого натрия из серно-натриевой соли | 1921 |
|
SU154A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
