оо to
J
ex
Изобретение относится к вентиляторным установкам, а именно к управлению режимами их работы, и может быть использовано для автоматического регулирования вентиляторов.
Целью изобретения является повышение аэродинамической устойчивости и качества регулирования.
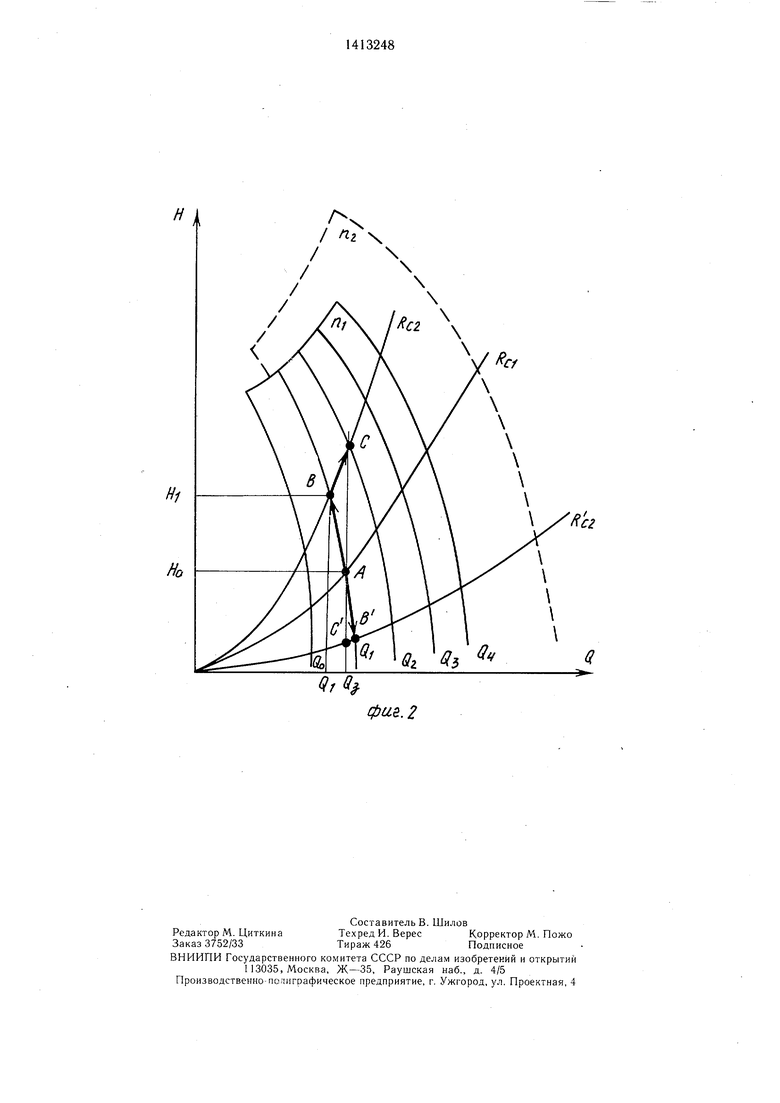
На фиг. 1 представлена функциональная схема устройства управления; на фиг. 2 - поясняющие работу устройства графики семейства напорных характеристик вентилятора при различных углах установки лопаток рабочего колеса в,- и разных скоростях вращения ротора п,, а также нагрузочные характеристики сети Rci.
Устройство управления содержит установленные на выходе вентилятора 1 датчик 2 давления и датчик 3 производительности, выходы которых подключены соответственно . к первым двум входам блока 4 вычисления управляющих воздействий и блока 5 определения запаса устойчивости. Третий вход блока 4 вычисления управляющих воздействий подсоединен к выходу блока 5 определения запаса устойчивости, четвертый вход - к выходу блока б задания производительности, а первый и второй выходы - к первому выходу соответственно первого и второго вычитающих элементов 7 и 8.
Выход вычитающего элемента 7 через блок 9 управления углом поворота лопаток соединен с первым исполнительным механизмом 10 одновременного поворота лопаток рабочего колеса вентилятора 1. При этом выход первого исполнительного механизма 10 через датчик 11 угла установки лопаток подключен к второму входу вычитающего элемента 7.
Выход второго вычитающего элемента 8 через блок 12 управления скоростью вращения соединен с вторым исполнительным механизмом 13 - регулируемым электроприводом вентилятора 1, выход которого через датчик 14 скорости вращения подсоединен к второму входу вычитающего элемента 8 и третьему входу блока 5 определения запаса устойчивости.
Блок 4 вычисления управляющих воздействий и блок 5 определения запаса устойчивости являются программно-управляемыми.
Функционально блок 5 определения запаса устойчивости решает задачу определения положения рабочей точки относительно границы устойчивости. В соответствии с алгоритмом его функционирования в данном блоке вычисляется расчетное сопротивление сети R H/Q , далее решаются совместно уравнения, отображающие соответственно границу устойчивости и аэродинамическую характеристику сети
W a-f6Q-fCQ ; .
Выбранное решение данной системы с положительными значениями (Q, Я) проверяется условием нахождения вентилятора в зоне устойчивой и экономичной работы. Если условие не выполняется, то управление передается блоку 4 вычисления управляющих воздействий, где проверяется возможность получения минимального отклонения фактической производительности от заданной, т. е.
,
и в случае справедливости этого условия определяется значение угла установки лопа5 ток Q, которое выводится на выход блока. В противном случае необходимо комбинированное управление, т. е. вычисление двух управляющих величин - в и п.
Устройство работает следующим образом. Сигналы от датчиков 2 давления и 3 про0 изводительности, соответствующие фактическим давлению Нср и производительности РФ вентилятора 1, подаются на первые два входа блока 4 вычисления управляющих действий, на четвертый вход которого
5 поступает сигнал Qs от блока 6 задания производительности. При этом в исходном состоянии рабочая точка А вентилятора 1 с координатами и находится на пересечении нагрузочной характеристики сети Rci и напорной характеристики вен0 тилятора для угла установки лопаток рабочего колеса 9i и скорости вращения щ (фиг. 2). Изменение общего сопротивления сети до величины Rcz (или Rfg) вызовет перемещение рабочей точки по напорной характеристики вентилятора в точку В (В ).
5
В блоке 4 вычисления управляющих воздействий определяется величина возникшего отклонения AQ Q3-Qp и значения угла установки лопаток рабочего колеса вт и скорости вращения «т при которых данное отклонение может быть скомпенсировано. Величины Вт и «т определяются, например, из условий поддержания заданной производительности вентиляторной установки в рамках оптимальной величины ее энергетических
5 параметров.
С первого и второго выходов блока 4 вычисления управляющих воздействий сигналы ©т. и п т поступают соответственно на первый 7 и второй 8 вычитающие элементы. На второй вход первого вычи0 тающего элемента 7 подается сигнал с датчика угла установки лопаток, на второй вход второго вычитающего элемента 8 - сигнал ПФ с датчика скорости вращения. Выходные сигналы вычитающих элементов 7 и 8 Ав вт-©Ф и Ап /гт-ЛФ соответст венно отрабатываются через соответствующие блоки 9, 12 управления исполнительными механизмами 10 и 13 поворота лопаток и датчик 14 скорости вращения.
0
В результате работы механизмов 10 и 13 производительность Qф вентилятора 1 изменяется до заданной величины Qs (рабочая точка перемещается по нагрузочной характеристике сети в точке С (С ).
Одновременно блок 5 определения запаса устойчивости по текущим значениям Яф, Q и ПФ контролирует положение рабочей точки относительно границы устойчивости. В случае попадания в зону, где не обеспечивается заданный запас, с выхода блока 5 по третьему входу принимается сигнал, в соответствии с которым блок 4 вычисления пар управляющих воздействий формирует на выходе новые значения и ,
10
чивость системы, а следовательно, качество регулирования.
Формула изобретения
Устройство управления режимом работы вентиляторной установки, содержащее блок задания производительности, датчик производительности, последовательно соединенные первый вычитающий элемент, блок управления углом поворота лопаток, первый исполнительный механизм и последовательно соединенные второй вычитающий элемент, блок управления скоростью вращения и второй исполнительный механизм, отличающее1. е. требуемая производительность венти- 15 ся тем, что, с целью повышения аэроди- лятора в данной точке характеристики до-намической устойчивости и качества управстигается изменением скорости вращения. Это объясняется тем, что при компенсации возникшего рассогласования изменением 6 возможен выход вентилятора за границу устойчивой работы. В этом случае на выхо- де блока 4 формируется значение :вф, т. е. значение угла установки лопаток, при котором обеспечивался бы заданный запас устойчивости. Отклонение
вычисляется значение .
Использование данного устройства позволяет формировать управляющие воздействия
ления, оно снабжено блоком вычисления управляющих воздействий, блоком определения запаса устойчивости, датчиком угла установки лопаток, датчиком скорости вращения и датчиком давления, при этом выходы датчика давления и датчика производительности соединены соответственно с первым и вторым входами блока вычисления управляющих воздействий и блока производительности AQ компенсируется за 25 определения запаса устойчивости, выход ко- счет изменения скорости вращения, т. е. торого подключен к третьему входу блока
вычисления управляющих воздействий, выход блока задания производительности соединен с четвертым входом блока вычисления управляющих воздействий, первый и
с учетом характеристики сети и положения 30 второй выходы которого подключены к пер- рабочей точки вентилятора относительновым входам первого и второго вычитаюграницы устойчивости. В результате вен-щего элемента соответственно, причем выход
тилятор может работать в зоне высоких КПДпервого исполнительного механизма через
вблизи границы устойчивости, не попадаядатчик угла установки лопаток соединен с
в режим помпажа, что, в свою очередь,вторым входом первого вычитающего элемелповыщает его аэродинамическую устойчи- 35 та, а выход второго исполнительного ме- вость. Кроме того, возникающее отклоне-ханизма через датчик скорости вращения -
ние производительности отрабатывается прик второму входу второго вычитающего элеэтом по двум независимым каналам, чтомента и к третьему входу блока определеповыщает точность, быстродействие и устой-ния запаса устойчивости.
0
чивость системы, а следовательно, качество регулирования.
Формула изобретения
Устройство управления режимом работы вентиляторной установки, содержащее блок задания производительности, датчик производительности, последовательно соединенные первый вычитающий элемент, блок управления углом поворота лопаток, первый исполнительный механизм и последовательно соединенные второй вычитающий элемент, блок управления скоростью вращения и второй исполнительный механизм, отличающее5 ся тем, что, с целью повышения аэроди- намической устойчивости и качества управН
H1
Но
Cf
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ВЕНТИЛЯТОРНОЙ УСТАНОВКИ | 1996 |
|
RU2129688C1 |
| Устройство управления режимом работы вентиляторной установки | 1984 |
|
SU1180534A1 |
| ИСПОЛНИТЕЛЬНО-РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКИХ СИСТЕМ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОБМОТОК ТЯГОВЫХ ЭЛЕКТРИЧЕСКИХ МАШИН | 2000 |
|
RU2201028C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ВЕНТИЛЯТОРНОЙ УСТАНОВКИ | 1992 |
|
RU2064587C1 |
| УСТРОЙСТВО СОГЛАСОВАННОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИВОДАМИ ОСЕВОГО ВЕНТИЛЯТОРА | 2003 |
|
RU2258157C2 |
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ОБМОТОК ТЯГОВЫХ ЭЛЕКТРИЧЕСКИХ МАШИН ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2251779C2 |
| Устройство для управления электроприводом турбомеханизма | 1986 |
|
SU1442704A1 |
| Устройство управления режимом работы вентилятора главного проветривания | 1974 |
|
SU613123A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ВЕНТИЛЯТОРНОЙ УСТАНОВКИ | 1998 |
|
RU2146331C1 |
| Устройство управления режимом работы вентилятора с поворотными на ходу лопатками | 1983 |
|
SU1122833A1 |
Изобретение относится к автоматическому управлению и регулированию режимами работы вентиляторных установок. Цель изобретения - повышение аэродинамической устойчивости и качества регулирования. Это достигается введением вустр-во программно-управляемых блока 4 вычисления управляющих воздействий, блока 5 определения запаса устойчивости и датчиков 11 угла установки лопаток, 14 скорости вращения и 2 давления. На входы блока 4 поступают сигналы от датчика 2 давления, датчика 3 произ-ти, блока 6 задания произв-сти и блока 5 определения запаса устойчивости. Выходы блока 4 подключены к входам соответствующих вычитающих элементов (ВЭ) 7 и 8. На вторые входы ВЭ 7 и 8 подключены соответственно выходы датчиков 11 и 14, связанных с механизмами 10 поворота лопаток и 13 электропривода вентилятора 1 соответственно. Блок 5 определяет положение рабочей точки относительно границы устойчивости. При выполнении условия нахождения вентилятора 1 в зоне устойчивости управление передается блоку 4. Здесь определяется величина возникщего отклонения AQ фактической произв-ти РФ от заданной Qa, значения угла 8 установки лопаток и скоростей HT вращения, при которых AQ м.б. скомпенсировано. В ВЭ 7 и 8 из значений QT и Пт- вычитаются их фактические значения Qcp и п, нзмеряе.мые датчиками 11 и 14. Выходные сигналы ВЭ 7 и 8 обрабатываются через соответствующие блоки управления 9 и 12 исполнительными механизмами 10 и 13. 2 ил. 59 (Л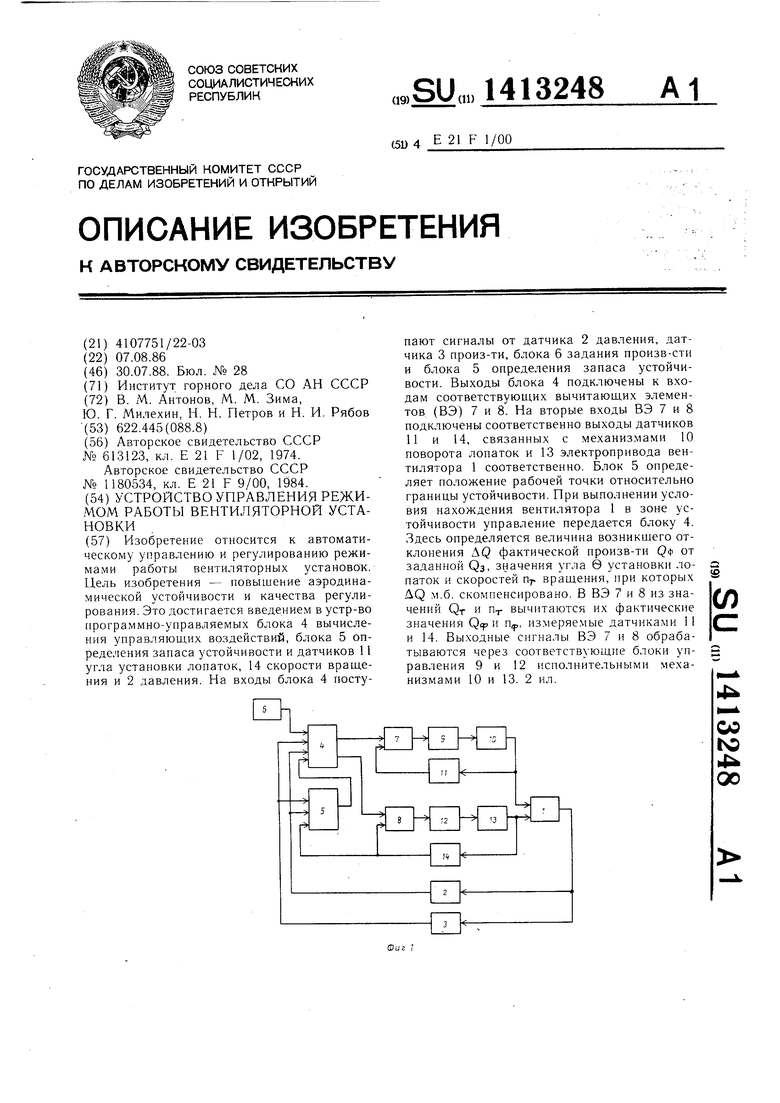
фав.2
| Устройство управления режимом работы вентилятора главного проветривания | 1974 |
|
SU613123A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство управления режимом работы вентиляторной установки | 1984 |
|
SU1180534A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
